 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Control and Structurally-Informed Gradient Optimization of a Custom 4-DOF Rigid-Body Manipulator
Dec 12, 2025This work develops a control-centric framework for a custom 4-DOF rigid-body manipulator by coupling a reduced-order Pontryagin's Maximum Principle (PMP) controller with a physics-informed Gradient Descent stage. The reduced PMP model provides a closed-form optimal control law for the joint accelerations, while the Gradient Descent module determines the corresponding time horizons by minimizing a cost functional built directly from the full Rigid-Body Dynamics. Structural-mechanics reaction analysis is used only to initialize feasible joint velocities-most critically the azimuthal component-ensuring that the optimizer begins in a physically admissible region. The resulting kinematic trajectories and dynamically consistent time horizons are then supplied to the symbolic Euler-Lagrange model to yield closed-form inverse-dynamics inputs. This pipeline preserves a strict control-theoretic structure while embedding the physical constraints and loading behavior of the manipulator in a computationally efficient way.
Mass-Adaptive Admittance Control for Robotic Manipulators
Apr 22, 2025



Handling objects with unknown or changing masses is a common challenge in robotics, often leading to errors or instability if the control system cannot adapt in real-time. In this paper, we present a novel approach that enables a six-degrees-of-freedom robotic manipulator to reliably follow waypoints while automatically estimating and compensating for unknown payload weight. Our method integrates an admittance control framework with a mass estimator, allowing the robot to dynamically update an excitation force to compensate for the payload mass. This strategy mitigates end-effector sagging and preserves stability when handling objects of unknown weights. We experimentally validated our approach in a challenging pick-and-place task on a shelf with a crossbar, improved accuracy in reaching waypoints and compliant motion compared to a baseline admittance-control scheme. By safely accommodating unknown payloads, our work enhances flexibility in robotic automation and represents a significant step forward in adaptive control for uncertain environments.
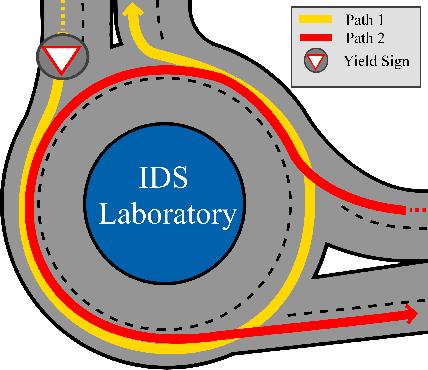
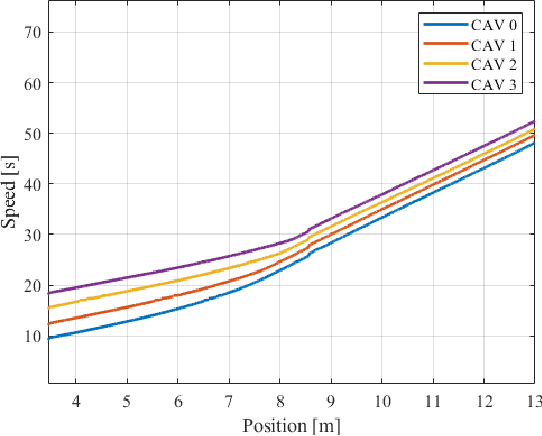
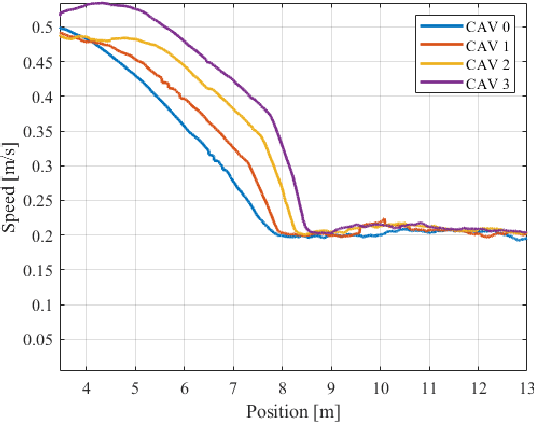
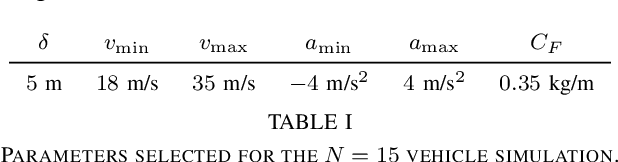
A Long-Duration Autonomy Approach to Connected and Automated Vehicles
Dec 16, 2024



In this article, we present a long-duration autonomy approach for the control of connected and automated vehicles (CAVs) operating in a transportation network. In particular, we focus on the performance of CAVs at traffic bottlenecks, including roundabouts, merging roadways, and intersections. We take a principled approach based on optimal control, and derive a reactive controller with guarantees on safety, performance, and energy efficiency. We guarantee safety through high order control barrier functions (HOCBFs), which we ``lift'' to first order CBFs using time-optimal motion primitives. We demonstrate the performance of our approach in simulation and compare it to an optimal control-based approach.
Control of Microrobots Using Model Predictive Control and Gaussian Processes for Disturbance Estimation
Jun 04, 2024



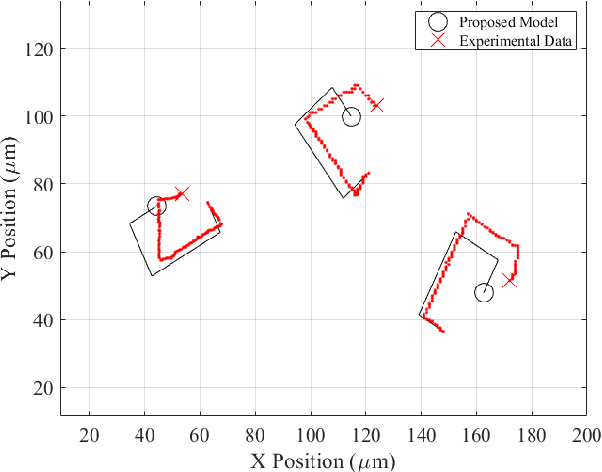
This paper presents a control framework for magnetically actuated micron-scale robots ($\mu$bots) designed to mitigate disturbances and improve trajectory tracking. To address the challenges posed by unmodeled dynamics and environmental variability, we combine data-driven modeling with model-based control to accurately track desired trajectories using a relatively small amount of data. The system is represented with a simple linear model, and Gaussian Processes (GP) are employed to capture and estimate disturbances. This disturbance-enhanced model is then integrated into a Model Predictive Controller (MPC). Our approach demonstrates promising performance in both simulation and experimental setups, showcasing its potential for precise and reliable microrobot control in complex environments.
Global Games with Negative Feedback for Autonomous Colony Maintenance using Robot Teams
Mar 22, 2024In this article we address the colony maintenance problem, where a team of robots are tasked with continuously maintaining the energy supply of an autonomous colony. We model this as a global game, where robots measure the energy level of a central nest to determine whether or not to forage for energy sources. We design a mechanism that avoids the trivial equilibrium where all robots always forage. Furthermore, we demonstrate that when the game is played iteratively a negative feedback term stabilizes the number of foraging robots at a non-trivial Nash equilibrium. We compare our approach qualitatively to existing global games, where a positive positive feedback term admits threshold-based decision making, and encourages many robots to forage simultaneously. We discuss how positive feedback can lead to a cascading failure in the presence of a human who recruits robots for external tasks, and we demonstrate the performance of our approach in simulation.
A Graph-Based Approach to Generate Energy-Optimal Robot Trajectories in Polygonal Environments
Nov 11, 2022



As robotic systems continue to address emerging issues in areas such as logistics, mobility, manufacturing, and disaster response, it is increasingly important to rapidly generate safe and energy-efficient trajectories. In this article, we present a new approach to plan energy-optimal trajectories through cluttered environments containing polygonal obstacles. In particular, we develop a method to quickly generate optimal trajectories for a double-integrator system, and we show that optimal path planning reduces to an integer program. To find an efficient solution, we present a distance-informed prefix search to efficiently generate optimal trajectories for a large class of environments. We demonstrate that our approach, while matching the performance of RRT* and Probabilistic Road Maps in terms of path length, outperforms both in terms of energy cost and computational time by up to an order of magnitude. We also demonstrate that our approach yields implementable trajectories in an experiment with a Crazyflie quadrotor.
A Constraint-Driven Approach to Line Flocking: The V Formation as an Energy-Saving Strategy
Sep 23, 2022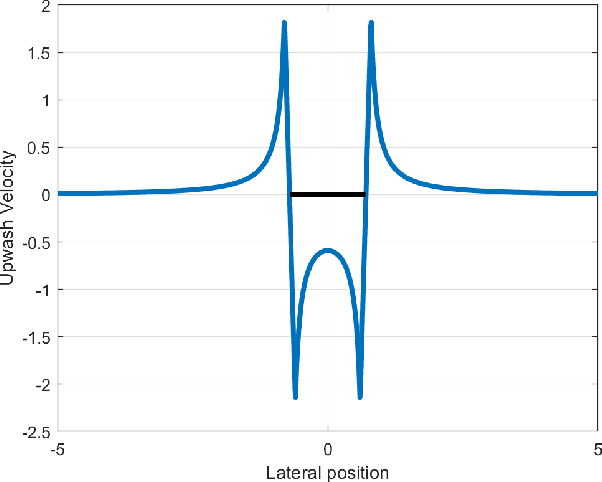
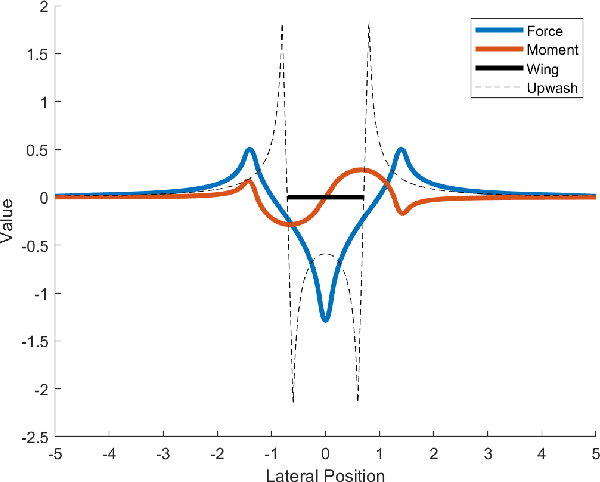
The study of robotic flocking has received significant attention in the past twenty years. In this article, we present a constraint-driven control algorithm that minimizes the energy consumption of individual agents and yields an emergent V formation. As the formation emerges from the decentralized interaction between agents, our approach is robust to the spontaneous addition or removal of agents to the system. First, we present an analytical model for the trailing upwash behind a fixed-wing UAV, and we derive the optimal air speed for trailing UAVs to maximize their travel endurance. Next, we prove that simply flying at the optimal airspeed will never lead to emergent flocking behavior, and we propose a new decentralized "anseroid" behavior that yields emergent V formations. We encode these behaviors in a constraint-driven control algorithm that minimizes the locomotive power of each UAV. Finally, we prove that UAVs initialized in an approximate V or echelon formation will converge under our proposed control law, and we demonstrate this emergence occurs in real-time in simulation and in physical experiments with a fleet of Crazyflie quadrotors.
A First-Order Approach to Model Simultaneous Control of Multiple Microrobots
Nov 05, 2021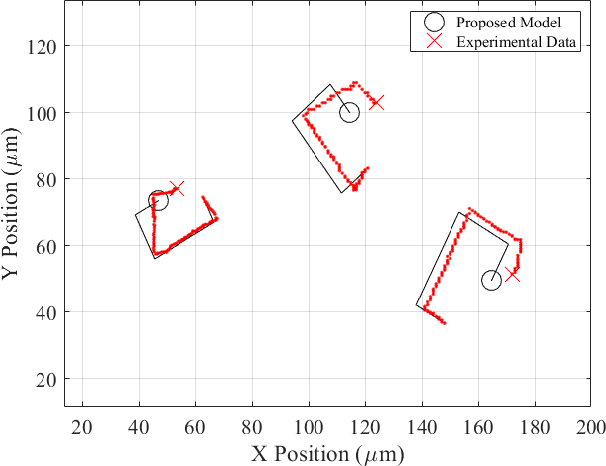

The control of swarm systems is relatively well understood for simple robotic platforms at the macro scale. However, there are still several unanswered questions about how similar results can be achieved for microrobots. In this paper, we propose a modeling framework based on a dynamic model of magnetized self-propelling Janus microrobots under a global magnetic field. We verify our model experimentally and provide methods that can aim at accurately describing the behavior of microrobots while modeling their simultaneous control. The model can be generalized to other microrobotic platforms in low Reynolds number environments.
A Digital Smart City for Emerging Mobility Systems
Sep 14, 2021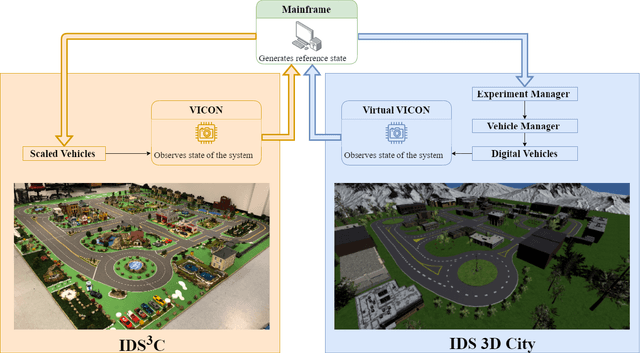
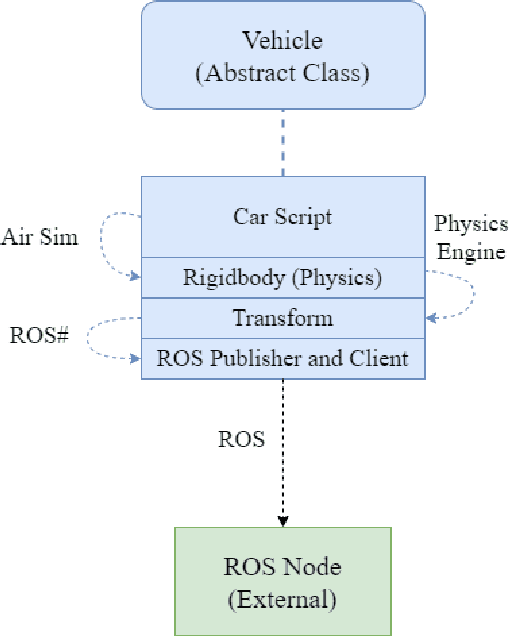
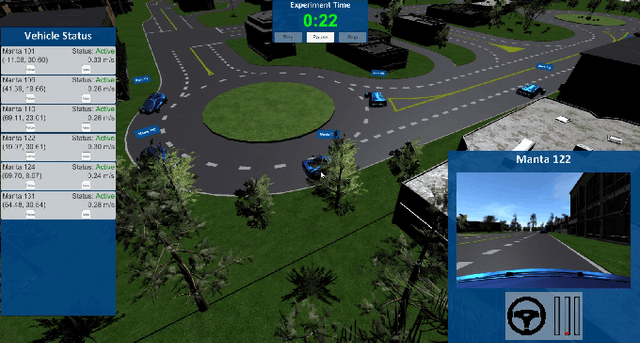
The increasing demand for emerging mobility systems with connected and automated vehicles has imposed the necessity for quality testing environments to support their development. In this paper, we introduce a Unity-based virtual simulation environment for emerging mobility systems, called the Information and Decision Science Lab's Scaled Smart Digital City (IDS $3$D City), intended to operate alongside its physical peer and its established control framework. By utilizing the Robot Operation System, AirSim, and Unity, we constructed a simulation environment capable of iteratively designing experiments significantly faster than it is possible in a physical testbed. This environment provides an intermediate step to validate the effectiveness of our control algorithms prior to their implementation in the physical testbed. The IDS $3$D City also enables us to demonstrate that our control algorithms work independently of the underlying vehicle dynamics, as the vehicle dynamics introduced by AirSim operate at a different scale than our scaled smart city. Finally, we demonstrate the behavior of our digital environment by performing an experiment in both the virtual and physical environments and compare their outputs.
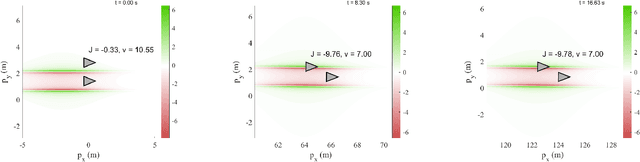
Constraint-Driven Optimal Control of Multi-Agent Systems: A Highway Platooning Case Study
Sep 13, 2021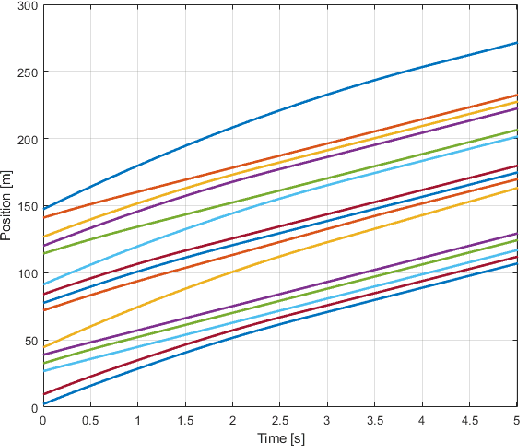
Platooning has been exploited as a method for vehicles to minimize energy consumption. In this article, we present a constraint-driven optimal control framework that yields emergent platooning behavior for connected and automated vehicles operating in an open transportation system. Our approach combines recent insights in constraint-driven optimal control with the physical aerodynamic interactions between vehicles in a highway setting. The result is a set of equations that describes when platooning is an appropriate strategy, as well as a descriptive optimal control law that yields emergent platooning behavior. Finally, we demonstrate these properties in simulation and with a real-time experiment in a scaled testbed.