 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual RL--MPC for Robust Microrobotic Cell Pushing Under Time-Varying Flow
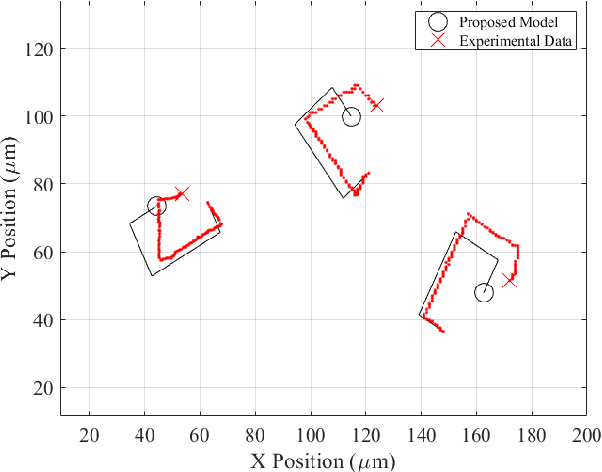
Mar 05, 2026Contact-rich micromanipulation in microfluidic flow is challenging because small disturbances can break pushing contact and induce large lateral drift. We study planar cell pushing with a magnetic rolling microrobot that tracks a waypoint-sampled reference curve under time-varying Poiseuille flow. We propose a hybrid controller that augments a nominal MPC with a learned residual policy trained by SAC. The policy outputs a bounded 2D velocity correction that is contact-gated, so residual actions are applied only during robot--cell contact, preserving reliable approach behavior and stabilizing learning. All methods share the same actuation interface and speed envelope for fair comparisons. Experiments show improved robustness and tracking accuracy over pure MPC and PID under nonstationary flow, with generalization from a clover training curve to unseen circle and square trajectories. A residual-bound sweep identifies an intermediate correction limit as the best trade-off, which we use in all benchmarks.
MicroPush: A Simulator and Benchmark for Contact-Rich Cell Pushing and Assembly with a Magnetic Rolling Microrobot
Feb 27, 2026Magnetic rolling microrobots enable gentle manipulation in confined microfluidic environments, yet autonomy for contact-rich behaviors such as cell pushing and multi-target assembly remains difficult to develop and evaluate reproducibly. We present MicroPush, an open-source simulator and benchmark suite for magnetic rolling microrobots in cluttered 2D scenes. MicroPush combines an overdamped interaction model with contact-aware stick--slip effects, lightweight near-field damping, optional Poiseuille background flow, and a calibrated mapping from actuation frequency to free-space rolling speed. On top of the simulator core, we provide a modular planning--control stack with a two-phase strategy for contact establishment and goal-directed pushing, together with a deterministic benchmark protocol with fixed tasks, staged execution, and unified CSV logging for single-object transport and hexagonal assembly. We report success, time, and tracking metrics, and an actuation-variation measure $E_{Δω}$. Results show that controller stability dominates performance under flow disturbances, while planner choice can influence command smoothness over long-horizon sequences via waypoint progression. MicroPush enables reproducible comparison and ablation of planning, control, and learning methods for microscale contact-rich micromanipulation.
Autonomous Vision-Based Magnetic Microrobotic Pushing of Micro-Objects and Cells
May 09, 2025



Accurate and autonomous transportation of micro-objects and biological cells can enable significant advances in a wide variety of research disciplines. Here, we present a novel, vision-based, model-free microrobotic pushing algorithm for the autonomous manipulation of micro objects and biological cells. The algorithm adjusts the axis of a rotating magnetic field that in turn controls the heading angle and spin axis of a spherical Janus rolling microrobot. We introduce the concept of a microrobotic guiding corridor to constrain the object and to avoid pushing failures. We then show that employing only two simple conditions, the microrobot is able to successfully and autonomously push microscale objects along predefined trajectories. We evaluate the performance of the algorithm by measuring the mean absolute error and completion time relative to a desired path at different actuation frequencies and guiding corridor widths. Finally, we demonstrate biomedical applicability by autonomously transporting a single biological cell, highlighting the methods potential for applications in tissue engineering, drug delivery and synthetic biology.
Control of Microrobots Using Model Predictive Control and Gaussian Processes for Disturbance Estimation
Jun 04, 2024



This paper presents a control framework for magnetically actuated micron-scale robots ($\mu$bots) designed to mitigate disturbances and improve trajectory tracking. To address the challenges posed by unmodeled dynamics and environmental variability, we combine data-driven modeling with model-based control to accurately track desired trajectories using a relatively small amount of data. The system is represented with a simple linear model, and Gaussian Processes (GP) are employed to capture and estimate disturbances. This disturbance-enhanced model is then integrated into a Model Predictive Controller (MPC). Our approach demonstrates promising performance in both simulation and experimental setups, showcasing its potential for precise and reliable microrobot control in complex environments.
Learning for Control of Rolling ubots
Dec 01, 2022



Micron-scale robots (ubots) have recently shown great promise for emerging medical applications, and accurate control of ubots is a critical next step to deploying them in real systems. In this work, we develop the idea of a nonlinear mismatch controller to compensate for the mismatch between the disturbed unicycle model of a rolling ubot and trajectory data collected during an experiment. We exploit the differential flatness property of the rolling ubot model to generate a mapping from the desired state trajectory to nominal control actions. Due to model mismatch and parameter estimation error, the nominal control actions will not exactly reproduce the desired state trajectory. We employ a Gaussian Process (GP) to learn the model mismatch as a function of the desired control actions, and correct the nominal control actions using a least-squares optimization. We demonstrate the performance of our online learning algorithm in simulation, where we show that the model mismatch makes some desired states unreachable. Finally, we validate our approach in an experiment and show that the error metrics are reduced by up to 40%.
Closed-loop Control of Catalytic Janus Microrobots
Oct 20, 2022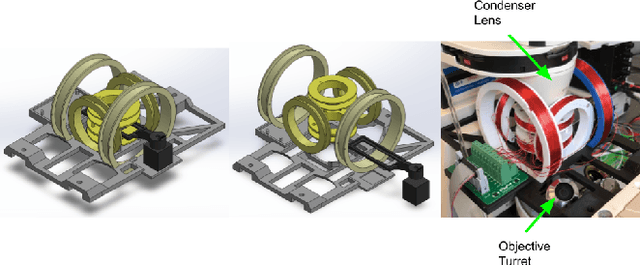
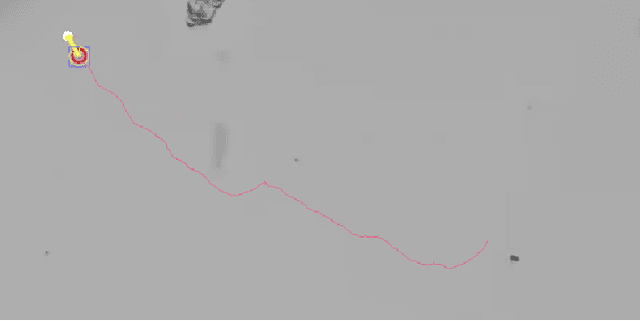
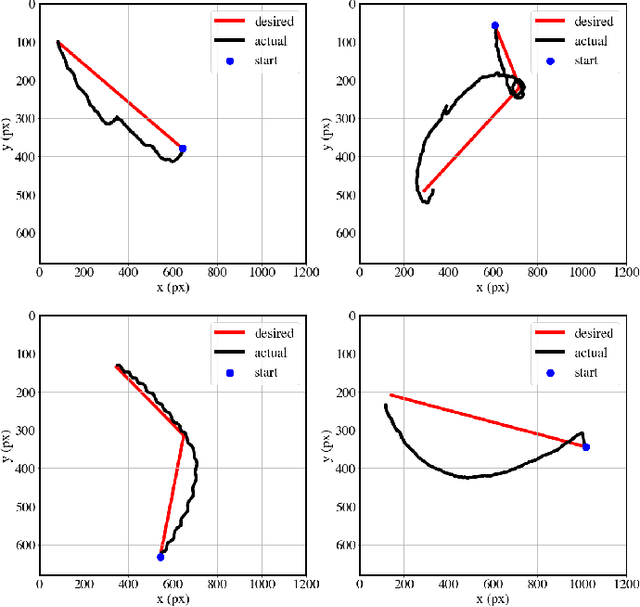
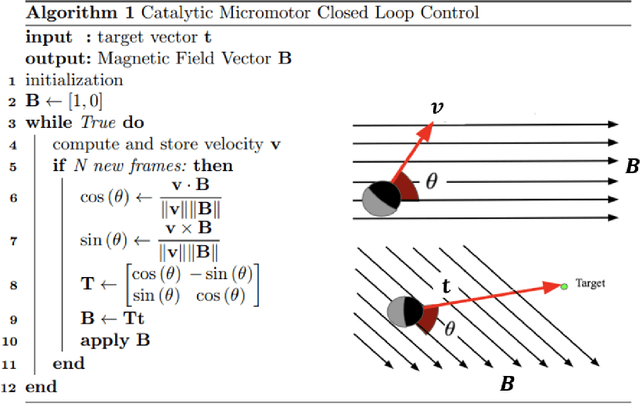
We report a closed-loop control system for paramagnetic catalytically self-propelled Janus microrobots. We achieve this control by employing electromagnetic coils that direct the magnetic field in a desired orientation to steer the microrobots. The microrobots move due to the catalytic decomposition of hydrogen peroxide, during which they align themselves to the magnetic torques applied to them. Because the angle between their direction of motion and their magnetic orientation is a priori unknown, an algorithm is used to determine this angular offset and adjust the magnetic field appropriately. The microrobots are located using real-time particle tracking that integrates with a video camera. A target location or desired trajectory can be drawn by the user for the microrobots to follow.
A First-Order Approach to Model Simultaneous Control of Multiple Microrobots
Nov 05, 2021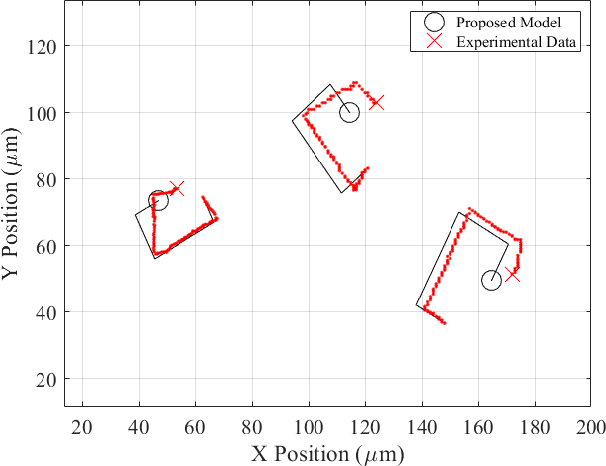

The control of swarm systems is relatively well understood for simple robotic platforms at the macro scale. However, there are still several unanswered questions about how similar results can be achieved for microrobots. In this paper, we propose a modeling framework based on a dynamic model of magnetized self-propelling Janus microrobots under a global magnetic field. We verify our model experimentally and provide methods that can aim at accurately describing the behavior of microrobots while modeling their simultaneous control. The model can be generalized to other microrobotic platforms in low Reynolds number environments.