 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUpSafe$^\circ$C: Upcycling for Controllable Safety in Large Language Models
Oct 02, 2025



Large Language Models (LLMs) have achieved remarkable progress across a wide range of tasks, but remain vulnerable to safety risks such as harmful content generation and jailbreak attacks. Existing safety techniques -- including external guardrails, inference-time guidance, and post-training alignment -- each face limitations in balancing safety, utility, and controllability. In this work, we propose UpSafe$^\circ$C, a unified framework for enhancing LLM safety through safety-aware upcycling. Our approach first identifies safety-critical layers and upcycles them into a sparse Mixture-of-Experts (MoE) structure, where the router acts as a soft guardrail that selectively activates original MLPs and added safety experts. We further introduce a two-stage SFT strategy to strengthen safety discrimination while preserving general capabilities. To enable flexible control at inference time, we introduce a safety temperature mechanism, allowing dynamic adjustment of the trade-off between safety and utility. Experiments across multiple benchmarks, base model, and model scales demonstrate that UpSafe$^\circ$C achieves robust safety improvements against harmful and jailbreak inputs, while maintaining competitive performance on general tasks. Moreover, analysis shows that safety temperature provides fine-grained inference-time control that achieves the Pareto-optimal frontier between utility and safety. Our results highlight a new direction for LLM safety: moving from static alignment toward dynamic, modular, and inference-aware control.
DiffAM: Diffusion-based Adversarial Makeup Transfer for Facial Privacy Protection
May 16, 2024



With the rapid development of face recognition (FR) systems, the privacy of face images on social media is facing severe challenges due to the abuse of unauthorized FR systems. Some studies utilize adversarial attack techniques to defend against malicious FR systems by generating adversarial examples. However, the generated adversarial examples, i.e., the protected face images, tend to suffer from subpar visual quality and low transferability. In this paper, we propose a novel face protection approach, dubbed DiffAM, which leverages the powerful generative ability of diffusion models to generate high-quality protected face images with adversarial makeup transferred from reference images. To be specific, we first introduce a makeup removal module to generate non-makeup images utilizing a fine-tuned diffusion model with guidance of textual prompts in CLIP space. As the inverse process of makeup transfer, makeup removal can make it easier to establish the deterministic relationship between makeup domain and non-makeup domain regardless of elaborate text prompts. Then, with this relationship, a CLIP-based makeup loss along with an ensemble attack strategy is introduced to jointly guide the direction of adversarial makeup domain, achieving the generation of protected face images with natural-looking makeup and high black-box transferability. Extensive experiments demonstrate that DiffAM achieves higher visual quality and attack success rates with a gain of 12.98% under black-box setting compared with the state of the arts. The code will be available at https://github.com/HansSunY/DiffAM.
Collaborative Remote Control of Unmanned Ground Vehicles in Virtual Reality
Aug 24, 2022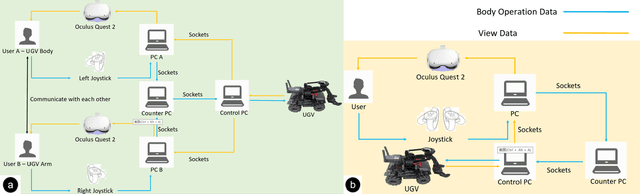
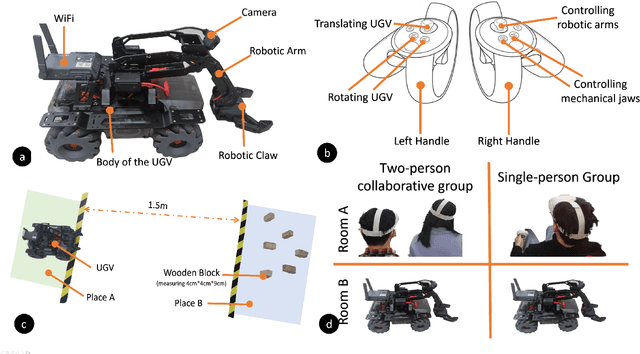
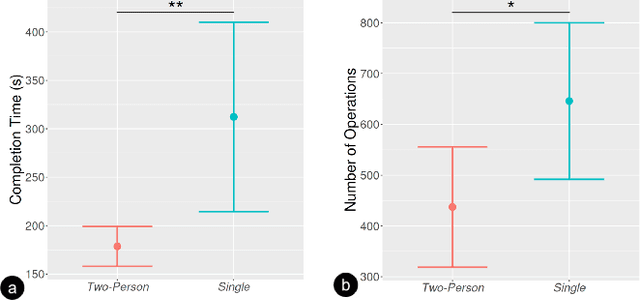
Virtual reality (VR) technology is commonly used in entertainment applications; however, it has also been deployed in practical applications in more serious aspects of our lives, such as safety. To support people working in dangerous industries, VR can ensure operators manipulate standardized tasks and work collaboratively to deal with potential risks. Surprisingly, little research has focused on how people can collaboratively work in VR environments. Few studies have paid attention to the cognitive load of operators in their collaborative tasks. Once task demands become complex, many researchers focus on optimizing the design of the interaction interfaces to reduce the cognitive load on the operator. That approach could be of merit; however, it can actually subject operators to a more significant cognitive load and potentially more errors and a failure of collaboration. In this paper, we propose a new collaborative VR system to support two teleoperators working in the VR environment to remote control an uncrewed ground vehicle. We use a compared experiment to evaluate the collaborative VR systems, focusing on the time spent on tasks and the total number of operations. Our results show that the total number of processes and the cognitive load during operations were significantly lower in the two-person group than in the single-person group. Our study sheds light on designing VR systems to support collaborative work with respect to the flow of work of teleoperators instead of simply optimizing the design outcomes.
PlotThread: Creating Expressive Storyline Visualizations using Reinforcement Learning
Sep 01, 2020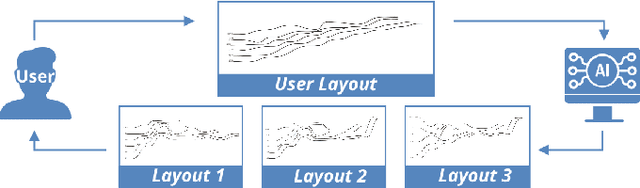
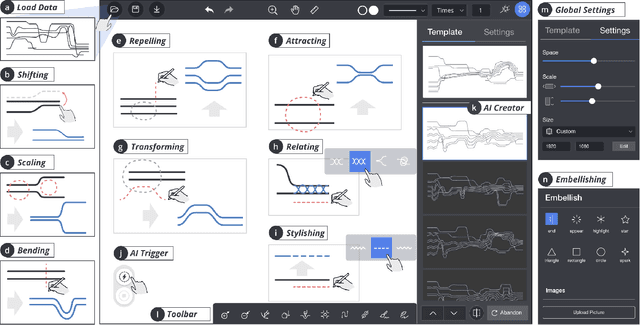
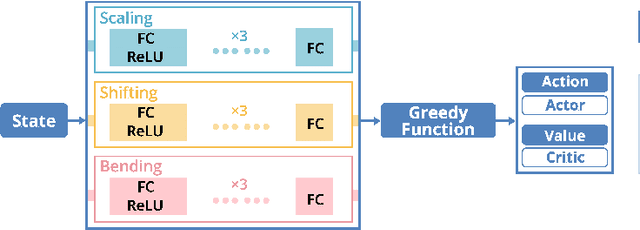
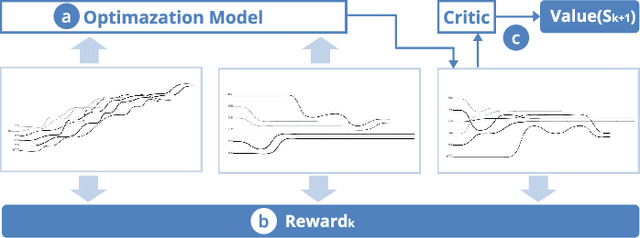
Storyline visualizations are an effective means to present the evolution of plots and reveal the scenic interactions among characters. However, the design of storyline visualizations is a difficult task as users need to balance between aesthetic goals and narrative constraints. Despite that the optimization-based methods have been improved significantly in terms of producing aesthetic and legible layouts, the existing (semi-) automatic methods are still limited regarding 1) efficient exploration of the storyline design space and 2) flexible customization of storyline layouts. In this work, we propose a reinforcement learning framework to train an AI agent that assists users in exploring the design space efficiently and generating well-optimized storylines. Based on the framework, we introduce PlotThread, an authoring tool that integrates a set of flexible interactions to support easy customization of storyline visualizations. To seamlessly integrate the AI agent into the authoring process, we employ a mixed-initiative approach where both the agent and designers work on the same canvas to boost the collaborative design of storylines. We evaluate the reinforcement learning model through qualitative and quantitative experiments and demonstrate the usage of PlotThread using a collection of use cases.