 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormalizing and Guaranteeing* Human-Robot Interaction
Jun 30, 2020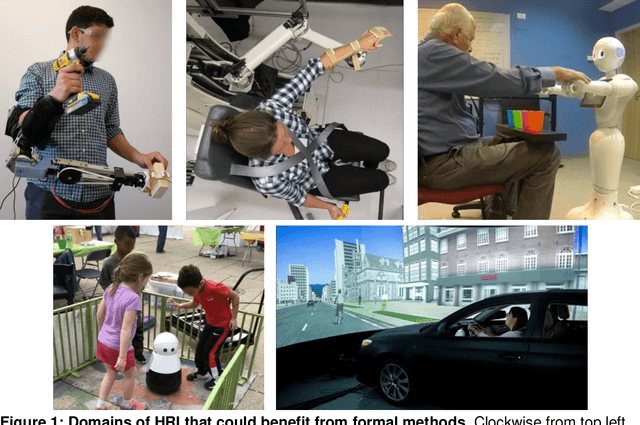
Robot capabilities are maturing across domains, from self-driving cars, to bipeds and drones. As a result, robots will soon no longer be confined to safety-controlled industrial settings; instead, they will directly interact with the general public. The growing field of Human-Robot Interaction (HRI) studies various aspects of this scenario - from social norms to joint action to human-robot teams and more. Researchers in HRI have made great strides in developing models, methods, and algorithms for robots acting with and around humans, but these "computational HRI" models and algorithms generally do not come with formal guarantees and constraints on their operation. To enable human-interactive robots to move from the lab to real-world deployments, we must address this gap. This article provides an overview of verification, validation and synthesis techniques used to create demonstrably trustworthy systems, describes several HRI domains that could benefit from such techniques, and provides a roadmap for the challenges and the research needed to create formalized and guaranteed human-robot interaction.
Socially intelligent task and motion planning for human-robot interaction
Jan 23, 2020As social beings, much human behavior is predicated on social context - the ambient social state that includes cultural norms, social signals, individual preferences, etc. In this paper, we propose a socially-aware task and motion planning algorithm that considers social context to generate appropriate and effective plans in human social environments (HSEs). The key strength of our proposed approach is that it explicitly models how potential actions not only affect objective cost, but also transform the social context in which it plans and acts. We investigate strategies to limit the complexity of our algorithm, so that our planner will remain tractable for mobile platforms in complex HSEs like hospitals and factories. The planner will also consider the relative importance and urgency of its tasks, which it uses to determine when it is and is not appropriate to violate social expectations to achieve its objective. This social awareness will allow robots to understand a fundamental rule of society: just because something makes your job easier, does not make it the right thing to do! To our knowledge, the proposed work is the first task and motion planning approach that supports socially intelligent robot policy for HSEs. Through this ongoing work, robots will be able to understand, respect, and leverage social context accomplish tasks both acceptably and effectively in HSEs.