 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSinkhorn Transformations for Single-Query Postprocessing in Text-Video Retrieval
Nov 14, 2023



A recent trend in multimodal retrieval is related to postprocessing test set results via the dual-softmax loss (DSL). While this approach can bring significant improvements, it usually presumes that an entire matrix of test samples is available as DSL input. This work introduces a new postprocessing approach based on Sinkhorn transformations that outperforms DSL. Further, we propose a new postprocessing setting that does not require access to multiple test queries. We show that our approach can significantly improve the results of state of the art models such as CLIP4Clip, BLIP, X-CLIP, and DRL, thus achieving a new state-of-the-art on several standard text-video retrieval datasets both with access to the entire test set and in the single-query setting.
Learn to Follow: Decentralized Lifelong Multi-agent Pathfinding via Planning and Learning
Oct 02, 2023



Multi-agent Pathfinding (MAPF) problem generally asks to find a set of conflict-free paths for a set of agents confined to a graph and is typically solved in a centralized fashion. Conversely, in this work, we investigate the decentralized MAPF setting, when the central controller that posses all the information on the agents' locations and goals is absent and the agents have to sequientially decide the actions on their own without having access to a full state of the environment. We focus on the practically important lifelong variant of MAPF, which involves continuously assigning new goals to the agents upon arrival to the previous ones. To address this complex problem, we propose a method that integrates two complementary approaches: planning with heuristic search and reinforcement learning through policy optimization. Planning is utilized to construct and re-plan individual paths. We enhance our planning algorithm with a dedicated technique tailored to avoid congestion and increase the throughput of the system. We employ reinforcement learning to discover the collision avoidance policies that effectively guide the agents along the paths. The policy is implemented as a neural network and is effectively trained without any reward-shaping or external guidance. We evaluate our method on a wide range of setups comparing it to the state-of-the-art solvers. The results show that our method consistently outperforms the learnable competitors, showing higher throughput and better ability to generalize to the maps that were unseen at the training stage. Moreover our solver outperforms a rule-based one in terms of throughput and is an order of magnitude faster than a state-of-the-art search-based solver.
Evaluation of Safety Constraints in Autonomous Navigation with Deep Reinforcement Learning
Jul 27, 2023

While reinforcement learning algorithms have had great success in the field of autonomous navigation, they cannot be straightforwardly applied to the real autonomous systems without considering the safety constraints. The later are crucial to avoid unsafe behaviors of the autonomous vehicle on the road. To highlight the importance of these constraints, in this study, we compare two learnable navigation policies: safe and unsafe. The safe policy takes the constraints into account, while the other does not. We show that the safe policy is able to generate trajectories with more clearance (distance to the obstacles) and makes less collisions while training without sacrificing the overall performance.
Monte-Carlo Tree Search for Multi-Agent Pathfinding: Preliminary Results
Jul 25, 2023In this work we study a well-known and challenging problem of Multi-agent Pathfinding, when a set of agents is confined to a graph, each agent is assigned a unique start and goal vertices and the task is to find a set of collision-free paths (one for each agent) such that each agent reaches its respective goal. We investigate how to utilize Monte-Carlo Tree Search (MCTS) to solve the problem. Although MCTS was shown to demonstrate superior performance in a wide range of problems like playing antagonistic games (e.g. Go, Chess etc.), discovering faster matrix multiplication algorithms etc., its application to the problem at hand was not well studied before. To this end we introduce an original variant of MCTS, tailored to multi-agent pathfinding. The crux of our approach is how the reward, that guides MCTS, is computed. Specifically, we use individual paths to assist the agents with the the goal-reaching behavior, while leaving them freedom to get off the track if it is needed to avoid collisions. We also use a dedicated decomposition technique to reduce the branching factor of the tree search procedure. Empirically we show that the suggested method outperforms the baseline planning algorithm that invokes heuristic search, e.g. A*, at each re-planning step.
Safe Interval Path Planning With Kinodynamic Constraints
Feb 01, 2023Safe Interval Path Planning (SIPP) is a powerful algorithm for solving single-agent pathfinding problem when the agent is confined to a graph and certain vertices/edges of this graph are blocked at certain time intervals due to dynamic obstacles that populate the environment. Original SIPP algorithm relies on the assumption that the agent is able to stop instantaneously. However, this assumption often does not hold in practice, e.g. a mobile robot moving with a cruising speed is not able to stop immediately but rather requires gradual deceleration to a full stop that takes time. In other words, the robot is subject to kinodynamic constraints. Unfortunately, as we show in this work, in such a case original SIPP is incomplete. To this end, we introduce a novel variant of SIPP that is provably complete and optimal for planning with acceleration/deceleration. In the experimental evaluation we show that the key property of the original SIPP still holds for the modified version -- it performs much less expansions compared to A* and, as a result, is notably faster.
Policy Optimization to Learn Adaptive Motion Primitives in Path Planning with Dynamic Obstacles
Dec 29, 2022



This paper addresses the kinodynamic motion planning for non-holonomic robots in dynamic environments with both static and dynamic obstacles -- a challenging problem that lacks a universal solution yet. One of the promising approaches to solve it is decomposing the problem into the smaller sub problems and combining the local solutions into the global one. The crux of any planning method for non-holonomic robots is the generation of motion primitives that generates solutions to local planning sub-problems. In this work we introduce a novel learnable steering function (policy), which takes into account kinodynamic constraints of the robot and both static and dynamic obstacles. This policy is efficiently trained via the policy optimization. Empirically, we show that our steering function generalizes well to unseen problems. We then plug in the trained policy into the sampling-based and lattice-based planners, and evaluate the resultant POLAMP algorithm (Policy Optimization that Learns Adaptive Motion Primitives) in a range of challenging setups that involve a car-like robot operating in the obstacle-rich parking-lot environments. We show that POLAMP is able to plan collision-free kinodynamic trajectories with success rates higher than 92%, when 50 simultaneously moving obstacles populate the environment showing better performance than the state-of-the-art competitors.
TransPath: Learning Heuristics For Grid-Based Pathfinding via Transformers
Dec 22, 2022Heuristic search algorithms, e.g. A*, are the commonly used tools for pathfinding on grids, i.e. graphs of regular structure that are widely employed to represent environments in robotics, video games etc. Instance-independent heuristics for grid graphs, e.g. Manhattan distance, do not take the obstacles into account and, thus, the search led by such heuristics performs poorly in the obstacle-rich environments. To this end, we suggest learning the instance-dependent heuristic proxies that are supposed to notably increase the efficiency of the search. The first heuristic proxy we suggest to learn is the correction factor, i.e. the ratio between the instance independent cost-to-go estimate and the perfect one (computed offline at the training phase). Unlike learning the absolute values of the cost-to-go heuristic function, which was known before, when learning the correction factor the knowledge of the instance-independent heuristic is utilized. The second heuristic proxy is the path probability, which indicates how likely the grid cell is lying on the shortest path. This heuristic can be utilized in the Focal Search framework as the secondary heuristic, allowing us to preserve the guarantees on the bounded sub-optimality of the solution. We learn both suggested heuristics in a supervised fashion with the state-of-the-art neural networks containing attention blocks (transformers). We conduct a thorough empirical evaluation on a comprehensive dataset of planning tasks, showing that the suggested techniques i) reduce the computational effort of the A* up to a factor of $4$x while producing the solutions, which costs exceed the costs of the optimal solutions by less than $0.3$% on average; ii) outperform the competitors, which include the conventional techniques from the heuristic search, i.e. weighted A*, as well as the state-of-the-art learnable planners.
Evaluation of RGB-D SLAM in Large Indoor Environments
Dec 12, 2022Simultaneous localization and mapping (SLAM) is one of the key components of a control system that aims to ensure autonomous navigation of a mobile robot in unknown environments. In a variety of practical cases a robot might need to travel long distances in order to accomplish its mission. This requires long-term work of SLAM methods and building large maps. Consequently the computational burden (including high memory consumption for map storage) becomes a bottleneck. Indeed, state-of-the-art SLAM algorithms include specific techniques and optimizations to tackle this challenge, still their performance in long-term scenarios needs proper assessment. To this end, we perform an empirical evaluation of two widespread state-of-the-art RGB-D SLAM methods, suitable for long-term navigation, i.e. RTAB-Map and Voxgraph. We evaluate them in a large simulated indoor environment, consisting of corridors and halls, while varying the odometer noise for a more realistic setup. We provide both qualitative and quantitative analysis of both methods uncovering their strengths and weaknesses. We find that both methods build a high-quality map with low odometry noise but tend to fail with high odometry noise. Voxgraph has lower relative trajectory estimation error and memory consumption than RTAB-Map, while its absolute error is higher.
Analysis Of The Anytime MAPF Solvers Based On The Combination Of Conflict-Based Search and Focal Search
Sep 20, 2022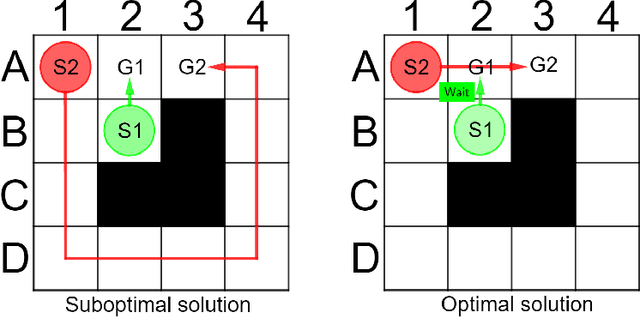
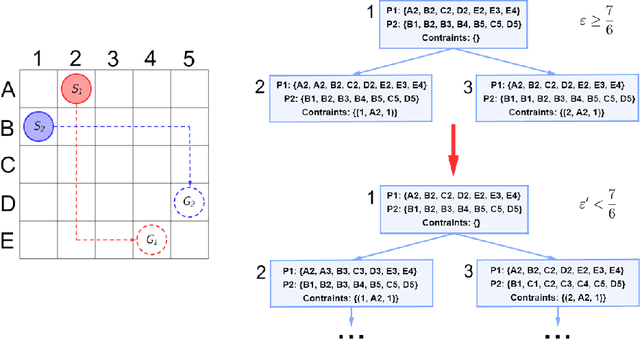
Conflict-Based Search (CBS) is a widely used algorithm for solving multi-agent pathfinding (MAPF) problems optimally. The core idea of CBS is to run hierarchical search, when, on the high level the tree of solutions candidates is explored, and on the low-level an individual planning for a specific agent (subject to certain constraints) is carried out. To trade-off optimality for running time different variants of bounded sub-optimal CBS were designed, which alter both high- and low-level search routines of CBS. Moreover, anytime variant of CBS does exist that applies Focal Search (FS) to the high-level of CBS - Anytime BCBS. However, no comprehensive analysis of how well this algorithm performs compared to the naive one, when we simply re-invoke CBS with the decreased sub-optimality bound, was present. This work aims at filling this gap. Moreover, we present and evaluate another anytime version of CBS that uses FS on both levels of CBS. Empirically, we show that its behavior is principally different from the one demonstrated by Anytime BCBS. Finally, we compare both algorithms head-to-head and show that using Focal Search on both levels of CBS can be beneficial in a wide range of setups.
2.5D Mapping, Pathfinding and Path Following For Navigation Of A Differential Drive Robot In Uneven Terrain
Sep 15, 2022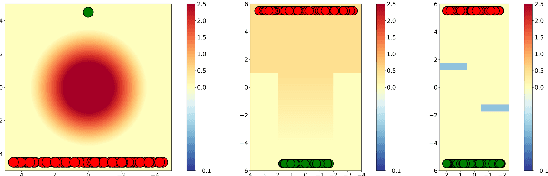
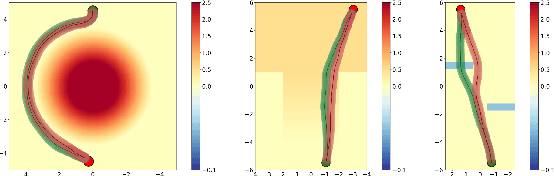
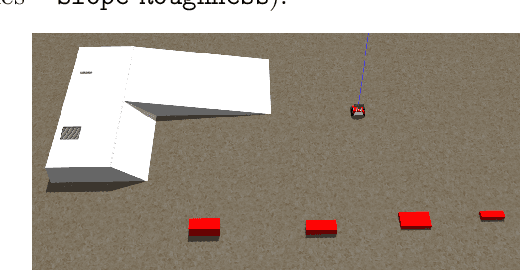
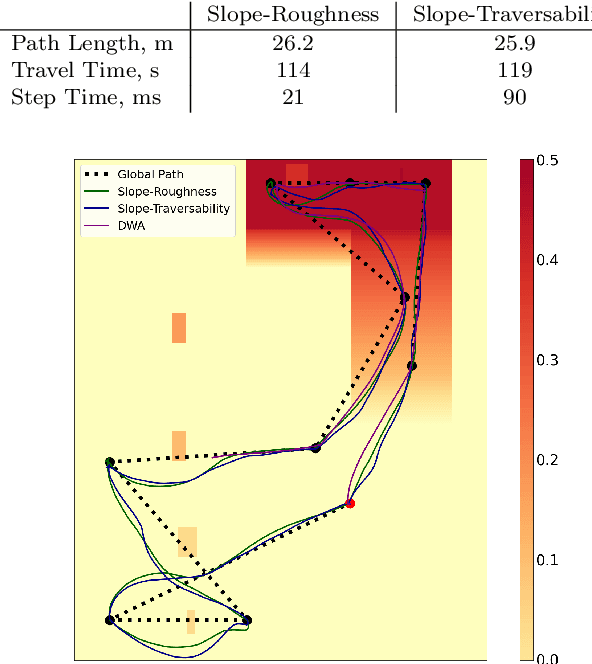
Safe navigation in uneven terrains is an important problem in robotic research. In this paper we propose a 2.5D navigation system which consists of elevation map building, path planning and local path following with obstacle avoidance. For local path following we use Model Predictive Path Integral (MPPI) control method. We propose novel cost-functions for MPPI in order to adapt it to elevation maps and motion through unevenness. We evaluate our system on multiple synthetic tests and in a simulated environment with different types of obstacles and rough surfaces.