 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFederated Learning via Intelligent Reflecting Surface
Nov 12, 2020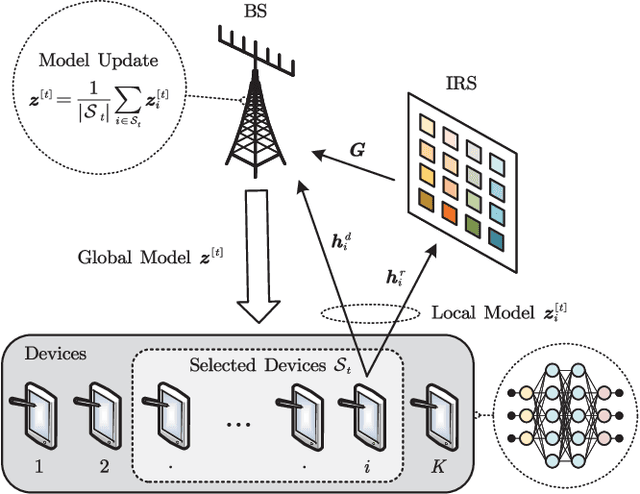
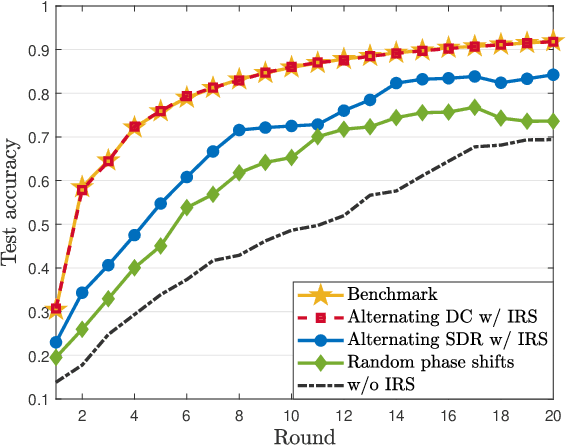
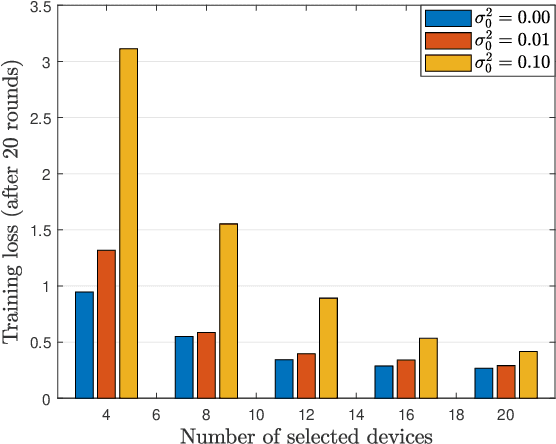
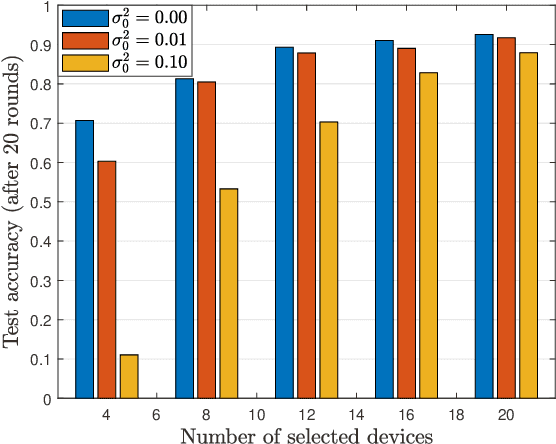
Over-the-air computation (AirComp) based federated learning (FL) is capable of achieving fast model aggregation by exploiting the waveform superposition property of multiple access channels. However, the model aggregation performance is severely limited by the unfavorable wireless propagation channels. In this paper, we propose to leverage intelligent reflecting surface (IRS) to achieve fast yet reliable model aggregation for AirComp-based FL. To optimize the learning performance, we formulate an optimization problem that jointly optimizes the device selection, the aggregation beamformer at the base station (BS), and the phase shifts at the IRS to maximize the number of devices participating in the model aggregation of each communication round under certain mean-squared-error (MSE) requirements. To tackle the formulated highly-intractable problem, we propose a two-step optimization framework. Specifically, we induce the sparsity of device selection in the first step, followed by solving a series of MSE minimization problems to find the maximum feasible device set in the second step. We then propose an alternating optimization framework, supported by the difference-of-convex-functions programming algorithm for low-rank optimization, to efficiently design the aggregation beamformers at the BS and phase shifts at the IRS. Simulation results will demonstrate that our proposed algorithm and the deployment of an IRS can achieve a lower training loss and higher FL prediction accuracy than the baseline algorithms.
Connectivity-Aware UAV Path Planning with Aerial Coverage Maps
Jun 01, 2019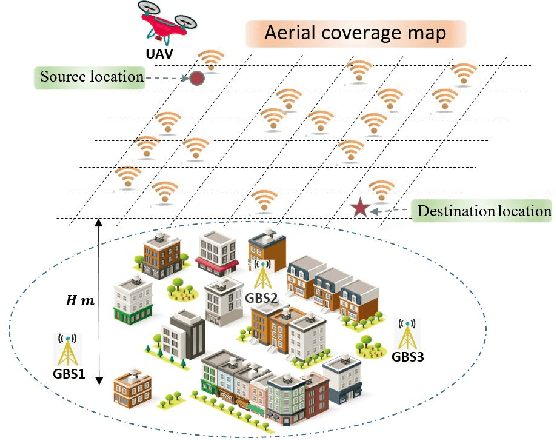
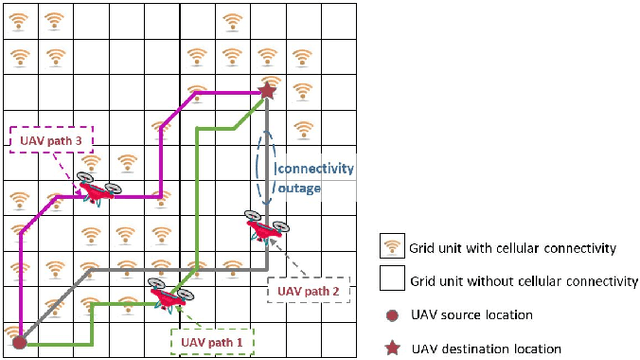
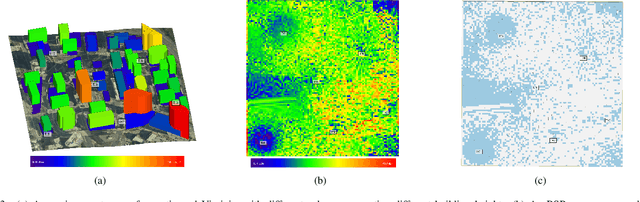
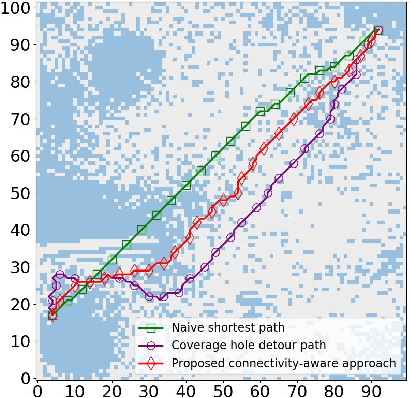
Cellular networks are promising to support effective wireless communications for unmanned aerial vehicles (UAVs), which will help to enable various long-range UAV applications. However, these networks are optimized for terrestrial users, and thus do not guarantee seamless aerial coverage. In this paper, we propose to overcome this difficulty by exploiting controllable mobility of UAVs, and investigate connectivity-aware UAV path planning. To explicitly impose communication requirements on UAV path planning, we introduce two new metrics to quantify the cellular connectivity quality of a UAV path. Moreover, aerial coverage maps are used to provide accurate locations of scattered coverage holes in the complicated propagation environment. We formulate the UAV path planning problem as finding the shortest path subject to connectivity constraints. Based on graph search methods, a novel connectivity-aware path planning algorithm with low complexity is proposed. The effectiveness and superiority of our proposed algorithm are demonstrated using the aerial coverage map of an urban section in Virginia, which is built by ray tracing. Simulation results also illustrate a tradeoff between the path length and connectivity quality of UAVs.