 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMATA: A Trainable Hierarchical Automaton System for Multi-Agent Visual Reasoning
Jan 27, 2026Recent vision-language models have strong perceptual ability but their implicit reasoning is hard to explain and easily generates hallucinations on complex queries. Compositional methods improve interpretability, but most rely on a single agent or hand-crafted pipeline and cannot decide when to collaborate across complementary agents or compete among overlapping ones. We introduce MATA (Multi-Agent hierarchical Trainable Automaton), a multi-agent system presented as a hierarchical finite-state automaton for visual reasoning whose top-level transitions are chosen by a trainable hyper agent. Each agent corresponds to a state in the hyper automaton, and runs a small rule-based sub-automaton for reliable micro-control. All agents read and write a shared memory, yielding transparent execution history. To supervise the hyper agent's transition policy, we build transition-trajectory trees and transform to memory-to-next-state pairs, forming the MATA-SFT-90K dataset for supervised finetuning (SFT). The finetuned LLM as the transition policy understands the query and the capacity of agents, and it can efficiently choose the optimal agent to solve the task. Across multiple visual reasoning benchmarks, MATA achieves the state-of-the-art results compared with monolithic and compositional baselines. The code and dataset are available at https://github.com/ControlNet/MATA.
NEUSIS: A Compositional Neuro-Symbolic Framework for Autonomous Perception, Reasoning, and Planning in Complex UAV Search Missions
Sep 16, 2024



This paper addresses the problem of autonomous UAV search missions, where a UAV must locate specific Entities of Interest (EOIs) within a time limit, based on brief descriptions in large, hazard-prone environments with keep-out zones. The UAV must perceive, reason, and make decisions with limited and uncertain information. We propose NEUSIS, a compositional neuro-symbolic system designed for interpretable UAV search and navigation in realistic scenarios. NEUSIS integrates neuro-symbolic visual perception, reasoning, and grounding (GRiD) to process raw sensory inputs, maintains a probabilistic world model for environment representation, and uses a hierarchical planning component (SNaC) for efficient path planning. Experimental results from simulated urban search missions using AirSim and Unreal Engine show that NEUSIS outperforms a state-of-the-art (SOTA) vision-language model and a SOTA search planning model in success rate, search efficiency, and 3D localization. These results demonstrate the effectiveness of our compositional neuro-symbolic approach in handling complex, real-world scenarios, making it a promising solution for autonomous UAV systems in search missions.
DASH: Dynamic Approach for Switching Heuristics
Jul 17, 2013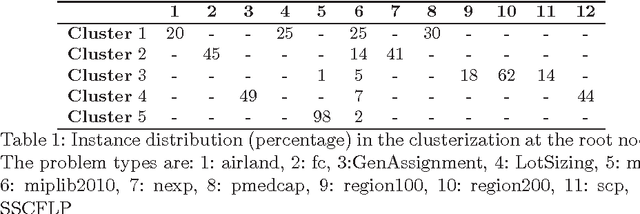
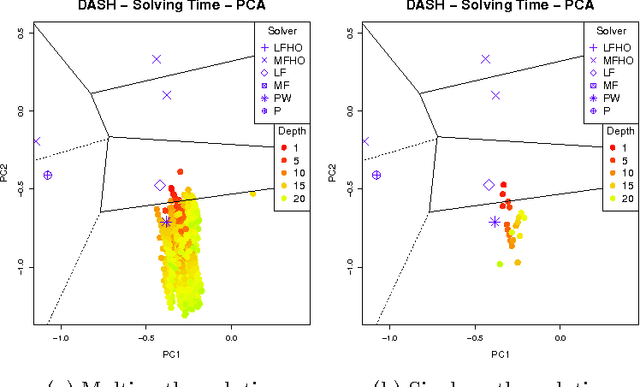
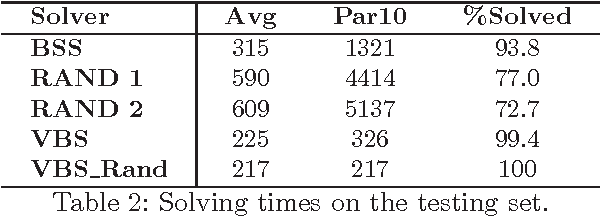
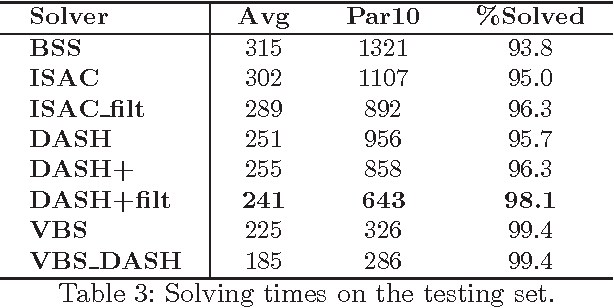
Complete tree search is a highly effective method for tackling MIP problems, and over the years, a plethora of branching heuristics have been introduced to further refine the technique for varying problems. Recently, portfolio algorithms have taken the process a step further, trying to predict the best heuristic for each instance at hand. However, the motivation behind algorithm selection can be taken further still, and used to dynamically choose the most appropriate algorithm for each encountered subproblem. In this paper we identify a feature space that captures both the evolution of the problem in the branching tree and the similarity among subproblems of instances from the same MIP models. We show how to exploit these features to decide the best time to switch the branching heuristic and then show how such a system can be trained efficiently. Experiments on a highly heterogeneous collection of MIP instances show significant gains over the pure algorithm selection approach that for a given instance uses only a single heuristic throughout the search.