 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAligning Microscopic Vehicle and Macroscopic Traffic Statistics: Reconstructing Driving Behavior from Partial Data
Jan 29, 2026A driving algorithm that aligns with good human driving practices, or at the very least collaborates effectively with human drivers, is crucial for developing safe and efficient autonomous vehicles. In practice, two main approaches are commonly adopted: (i) supervised or imitation learning, which requires comprehensive naturalistic driving data capturing all states that influence a vehicle's decisions and corresponding actions, and (ii) reinforcement learning (RL), where the simulated driving environment either matches or is intentionally more challenging than real-world conditions. Both methods depend on high-quality observations of real-world driving behavior, which are often difficult and costly to obtain. State-of-the-art sensors on individual vehicles can gather microscopic data, but they lack context about the surrounding conditions. Conversely, roadside sensors can capture traffic flow and other macroscopic characteristics, but they cannot associate this information with individual vehicles on a microscopic level. Motivated by this complementarity, we propose a framework that reconstructs unobserved microscopic states from macroscopic observations, using microscopic data to anchor observed vehicle behaviors, and learns a shared policy whose behavior is microscopically consistent with the partially observed trajectories and actions and macroscopically aligned with target traffic statistics when deployed population-wide. Such constrained and regularized policies promote realistic flow patterns and safe coordination with human drivers at scale.
SignRAG: A Retrieval-Augmented System for Scalable Zero-Shot Road Sign Recognition
Dec 14, 2025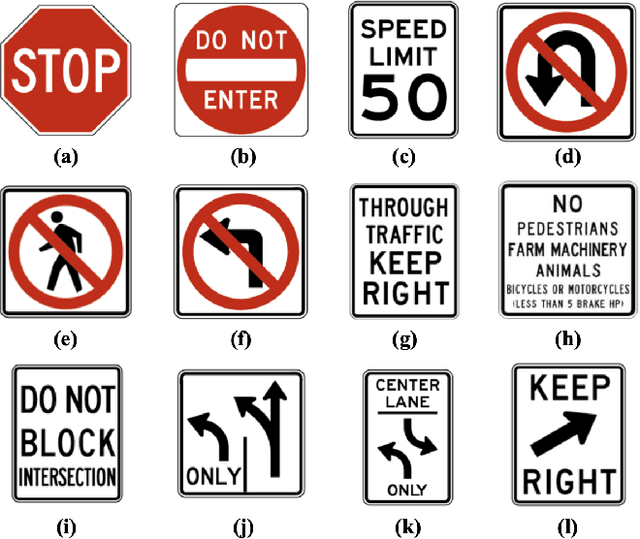

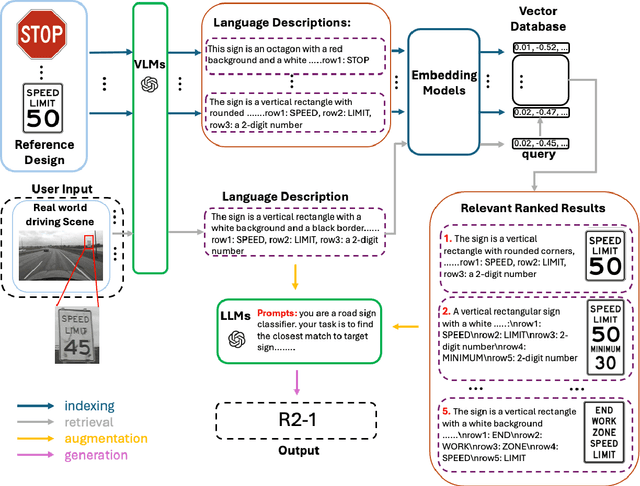

Automated road sign recognition is a critical task for intelligent transportation systems, but traditional deep learning methods struggle with the sheer number of sign classes and the impracticality of creating exhaustive labeled datasets. This paper introduces a novel zero-shot recognition framework that adapts the Retrieval-Augmented Generation (RAG) paradigm to address this challenge. Our method first uses a Vision Language Model (VLM) to generate a textual description of a sign from an input image. This description is used to retrieve a small set of the most relevant sign candidates from a vector database of reference designs. Subsequently, a Large Language Model (LLM) reasons over the retrieved candidates to make a final, fine-grained recognition. We validate this approach on a comprehensive set of 303 regulatory signs from the Ohio MUTCD. Experimental results demonstrate the framework's effectiveness, achieving 95.58% accuracy on ideal reference images and 82.45% on challenging real-world road data. This work demonstrates the viability of RAG-based architectures for creating scalable and accurate systems for road sign recognition without task-specific training.
Lightweight Authenticated Task Offloading in 6G-Cloud Vehicular Twin Networks
Feb 05, 2025Task offloading management in 6G vehicular networks is crucial for maintaining network efficiency, particularly as vehicles generate substantial data. Integrating secure communication through authentication introduces additional computational and communication overhead, significantly impacting offloading efficiency and latency. This paper presents a unified framework incorporating lightweight Identity-Based Cryptographic (IBC) authentication into task offloading within cloud-based 6G Vehicular Twin Networks (VTNs). Utilizing Proximal Policy Optimization (PPO) in Deep Reinforcement Learning (DRL), our approach optimizes authenticated offloading decisions to minimize latency and enhance resource allocation. Performance evaluation under varying network sizes, task sizes, and data rates reveals that IBC authentication can reduce offloading efficiency by up to 50% due to the added overhead. Besides, increasing network size and task size can further reduce offloading efficiency by up to 91.7%. As a countermeasure, increasing the transmission data rate can improve the offloading performance by as much as 63%, even in the presence of authentication overhead. The code for the simulations and experiments detailed in this paper is available on GitHub for further reference and reproducibility [1].
Using Collision Momentum in Deep Reinforcement Learning Based Adversarial Pedestrian Modeling
Jun 13, 2023



Recent research in pedestrian simulation often aims to develop realistic behaviors in various situations, but it is challenging for existing algorithms to generate behaviors that identify weaknesses in automated vehicles' performance in extreme and unlikely scenarios and edge cases. To address this, specialized pedestrian behavior algorithms are needed. Current research focuses on realistic trajectories using social force models and reinforcement learning based models. However, we propose a reinforcement learning algorithm that specifically targets collisions and better uncovers unique failure modes of automated vehicle controllers. Our algorithm is efficient and generates more severe collisions, allowing for the identification and correction of weaknesses in autonomous driving algorithms in complex and varied scenarios.
A Formal Safety Characterization of Advanced Driver Assist Systems in the Car-Following Regime with Scenario-Sampling
Feb 17, 2022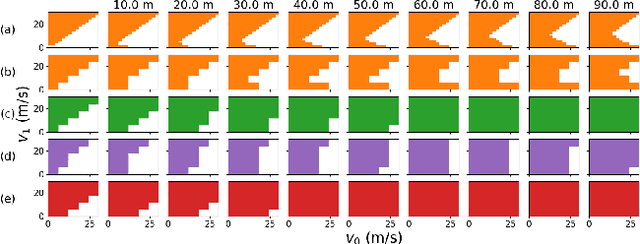
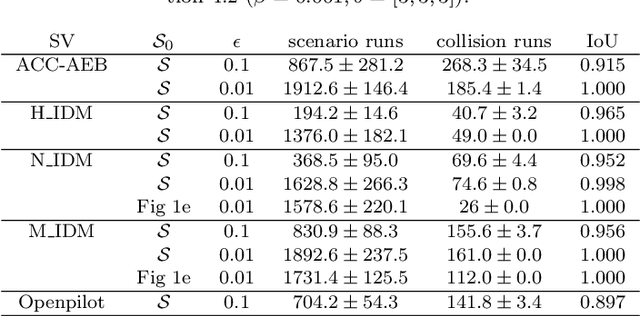
The capability to follow a lead-vehicle and avoid rear-end collisions is one of the most important functionalities for human drivers and various Advanced Driver Assist Systems (ADAS). Existing safety performance justification of the car-following systems either relies on simple concrete scenarios with biased surrogate metrics or requires a significantly long driving distance for risk observation and inference. In this paper, we propose a guaranteed unbiased and sampling efficient scenario-based safety evaluation framework inspired by the previous work on $\epsilon\delta$-almost safe set quantification. The proposal characterizes the complete safety performance of the test subject in the car-following regime. The performance of the proposed method is also demonstrated in challenging cases including some widely adopted car-following decision-making modules and the commercially available Openpilot driving stack by CommaAI.
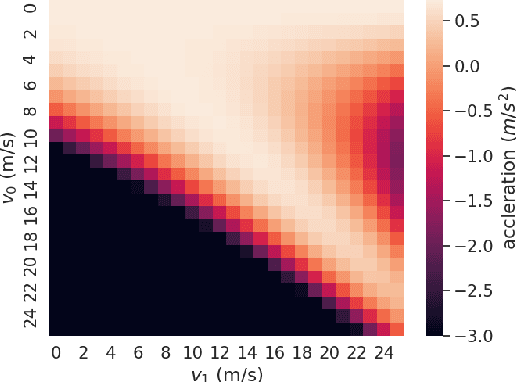
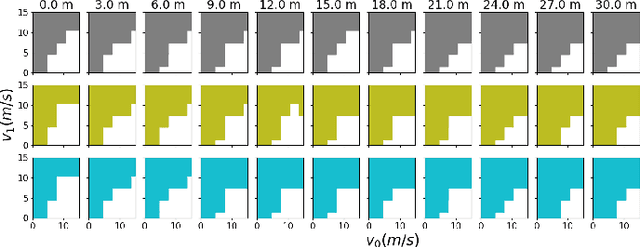
A Finite-Sampling, Operational Domain Specific, and Provably Unbiased Connected and Automated Vehicle Safety Metric
Nov 15, 2021
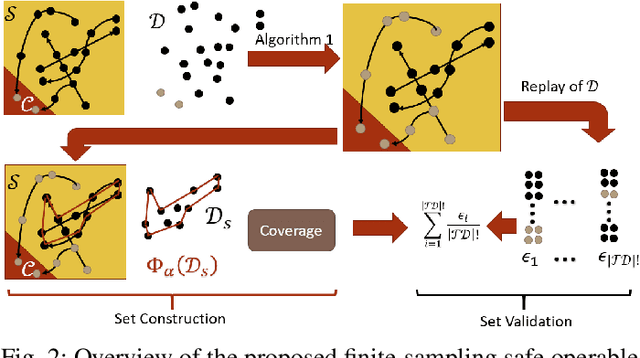
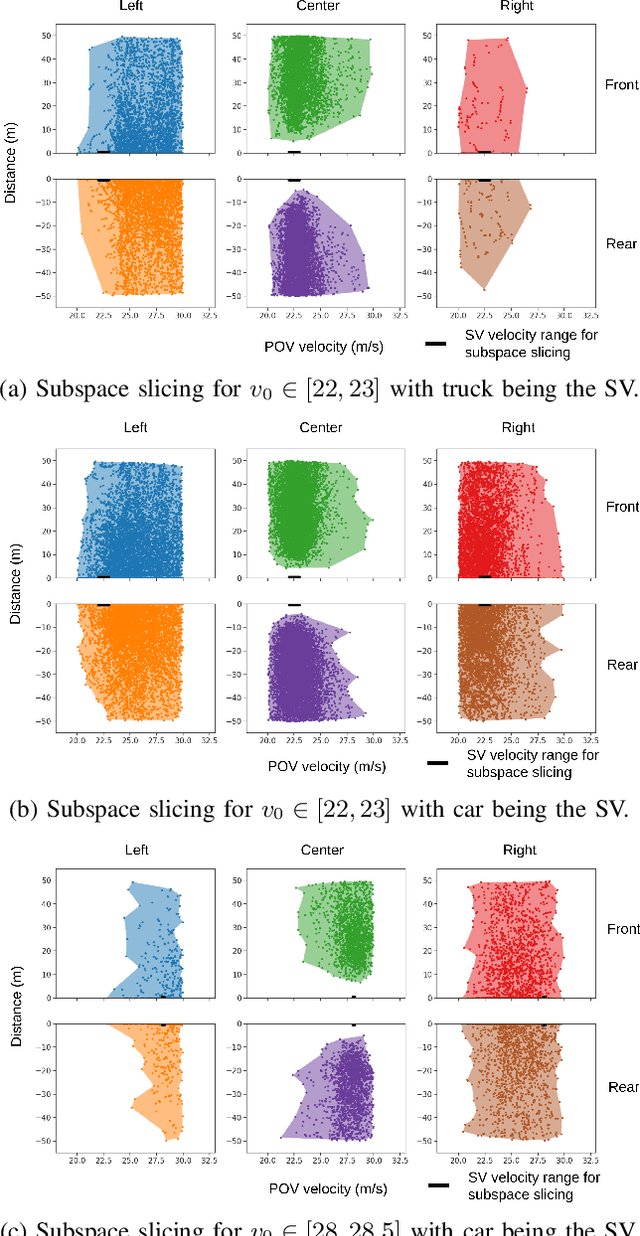
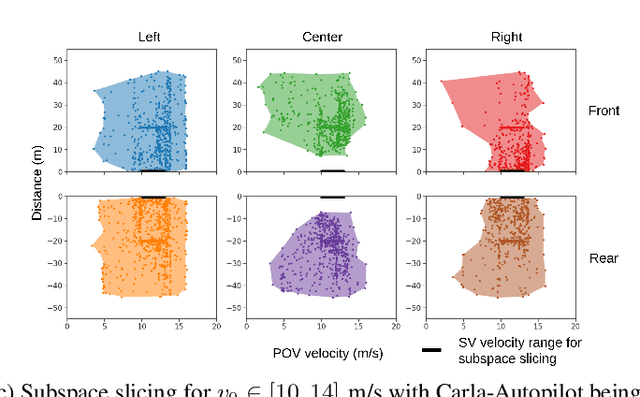
A connected and automated vehicle safety metric determines the performance of a subject vehicle (SV) by analyzing the data involving the interactions among the SV and other dynamic road users and environmental features. When the data set contains only a finite set of samples collected from the naturalistic mixed-traffic driving environment, a metric is expected to generalize the safety assessment outcome from the observed finite samples to the unobserved cases by specifying in what domain the SV is expected to be safe and how safe the SV is, statistically, in that domain. However, to the best of our knowledge, none of the existing safety metrics are able to justify the above properties with an operational domain specific, guaranteed complete, and provably unbiased safety evaluation outcome. In this paper, we propose a novel safety metric that involves the $\alpha$-shape and the $\epsilon$-almost robustly forward invariant set to characterize the SV's almost safe operable domain and the probability for the SV to remain inside the safe domain indefinitely, respectively. The empirical performance of the proposed method is demonstrated in several different operational design domains through a series of cases covering a variety of fidelity levels (real-world and simulators), driving environments (highway, urban, and intersections), road users (car, truck, and pedestrian), and SV driving behaviors (human driver and self driving algorithms).
A Formal Characterization of Black-Box System Safety Performance with Scenario Sampling
Oct 05, 2021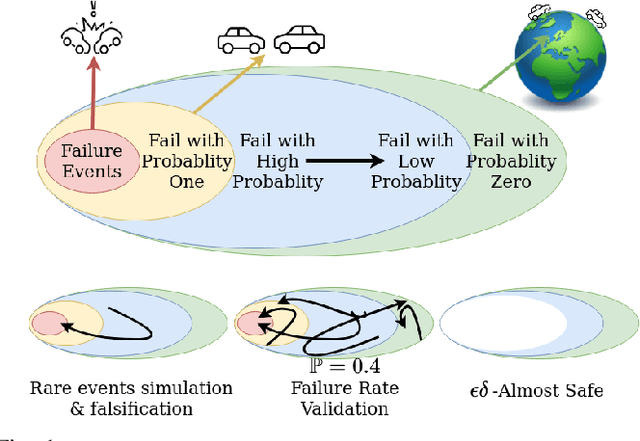
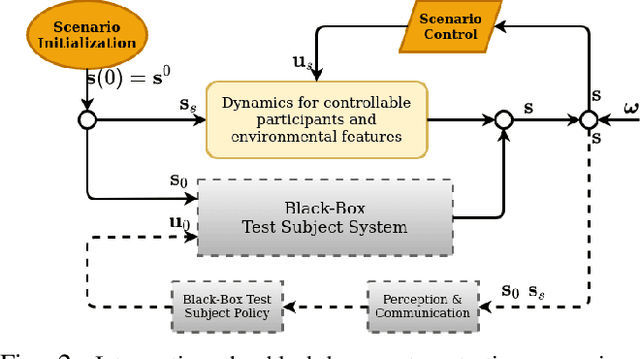

A typical scenario-based evaluation framework seeks to characterize a black-box system's safety performance (e.g., failure rate) through repeatedly sampling initialization configurations (scenario sampling) and executing a certain test policy for scenario propagation (scenario testing) with the black-box system involved as the test subject. In this letter, we first present a novel safety evaluation criterion that seeks to characterize the actual operational domain within which the test subject would remain safe indefinitely with high probability. By formulating the black-box testing scenario as a dynamic system, we show that the presented problem is equivalent to finding a certain "almost" robustly forward invariant set for the given system. Second, for an arbitrary scenario testing strategy, we propose a scenario sampling algorithm that is provably asymptotically optimal in obtaining the safe invariant set with arbitrarily high accuracy. Moreover, as one considers different testing strategies (e.g., biased sampling of safety-critical cases), we show that the proposed algorithm still converges to the unbiased approximation of the safety characterization outcome if the scenario testing satisfies a certain condition. Finally, the effectiveness of the presented scenario sampling algorithms and various theoretical properties are demonstrated in a case study of the safety evaluation of a control barrier function-based mobile robot collision avoidance system.
Pedestrian Emergence Estimation and Occlusion-Aware Risk Assessment for Urban Autonomous Driving
Jul 06, 2021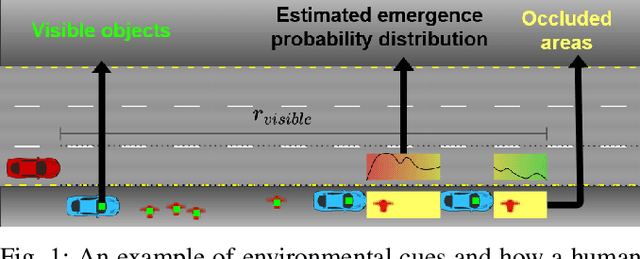

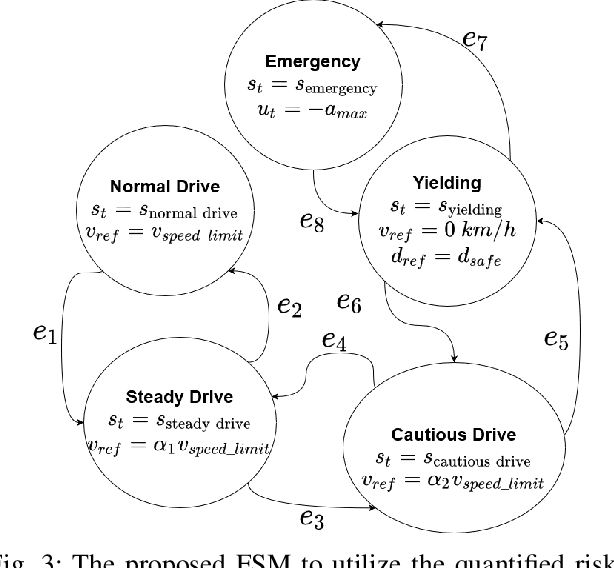
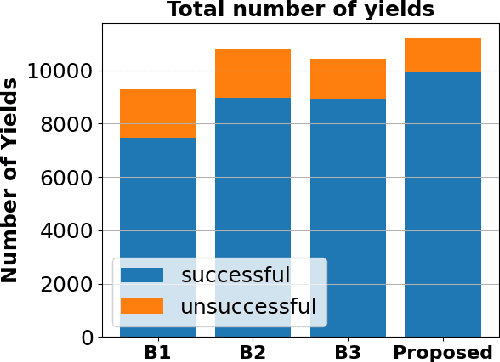
Avoiding unseen or partially occluded vulnerable road users (VRUs) is a major challenge for fully autonomous driving in urban scenes. However, occlusion-aware risk assessment systems have not been widely studied. Here, we propose a pedestrian emergence estimation and occlusion-aware risk assessment system for urban autonomous driving. First, the proposed system utilizes available contextual information, such as visible cars and pedestrians, to estimate pedestrian emergence probabilities in occluded regions. These probabilities are then used in a risk assessment framework, and incorporated into a longitudinal motion controller. The proposed controller is tested against several baseline controllers that recapitulate some commonly observed driving styles. The simulated test scenarios include randomly placed parked cars and pedestrians, most of whom are occluded from the ego vehicle's view and emerges randomly. The proposed controller outperformed the baselines in terms of safety and comfort measures.
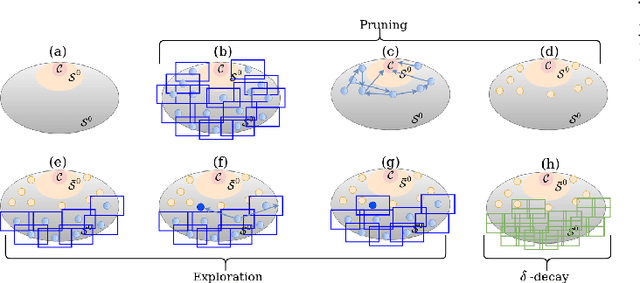
Towards Guaranteed Safety Assurance of Automated Driving Systems with Scenario Sampling: An Invariant Set Perspective (Extended Version)
Apr 23, 2021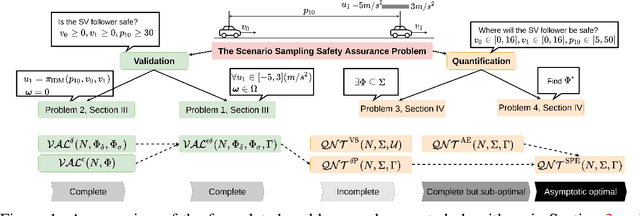
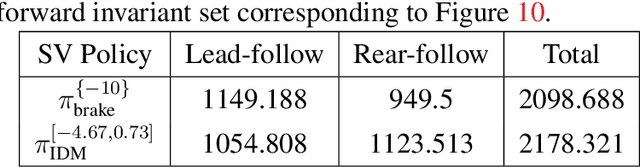
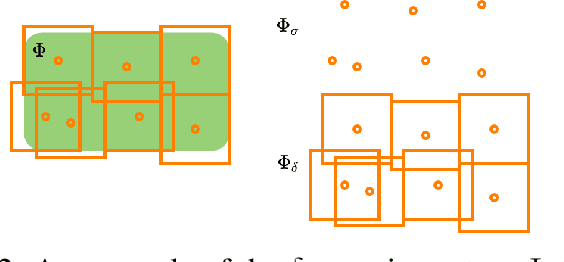
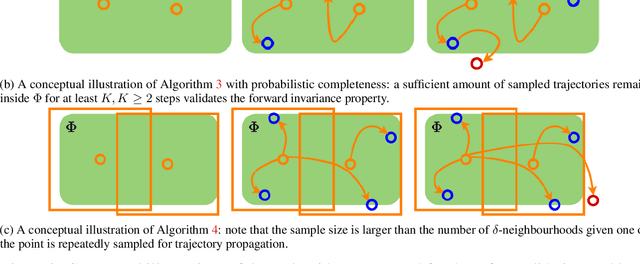
How many scenarios are sufficient to validate the safe Operational Design Domain (ODD) of an Automated Driving System (ADS) equipped vehicle? Is a more significant number of sampled scenarios guaranteeing a more accurate safety assessment of the ADS? Despite the various empirical success of ADS safety evaluation with scenario sampling in practice, some of the fundamental properties are largely unknown. This paper seeks to remedy this gap by formulating and tackling the scenario sampling safety assurance problem from a set invariance perspective. First, a novel conceptual equivalence is drawn between the scenario sampling safety assurance problem and the data-driven robustly controlled forward invariant set validation and quantification problem. This paper then provides a series of resolution complete and probabilistic complete solutions with finite-sampling analyses for the safety validation problem that authenticates a given ODD. On the other hand, the quantification problem escalates the validation challenge and starts looking for a safe sub-domain of a particular property. This inspires various algorithms that are provably probabilistic incomplete, probabilistic complete but sub-optimal, and asymptotically optimal. Finally, the proposed asymptotically optimal scenario sampling safety quantification algorithm is also empirically demonstrated through simulation experiments.
Predicting Pedestrian Crossing Intention with Feature Fusion and Spatio-Temporal Attention
Apr 12, 2021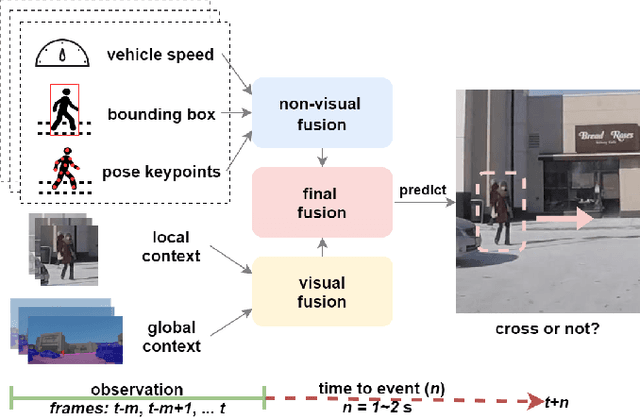
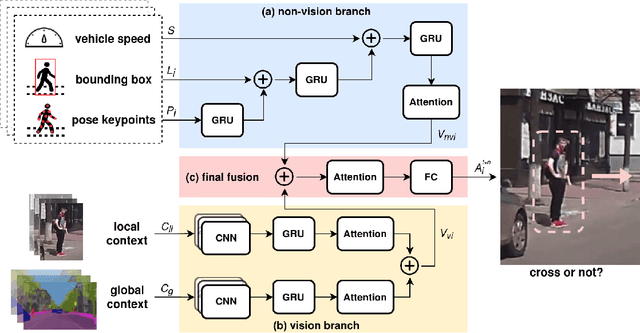
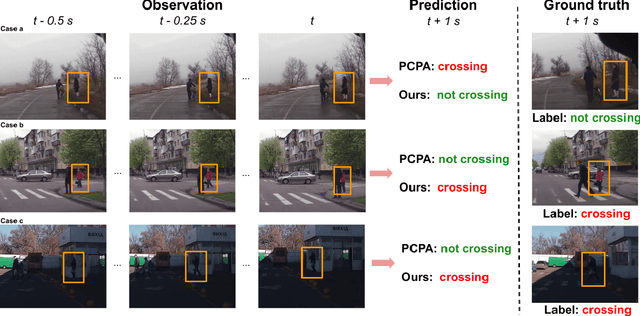
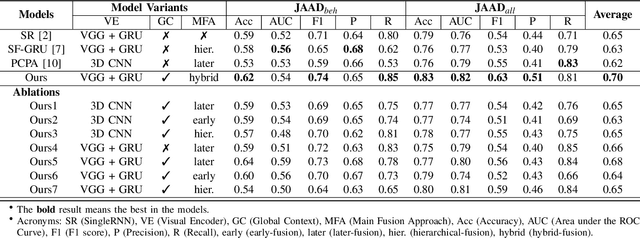
Predicting vulnerable road user behavior is an essential prerequisite for deploying Automated Driving Systems (ADS) in the real-world. Pedestrian crossing intention should be recognized in real-time, especially for urban driving. Recent works have shown the potential of using vision-based deep neural network models for this task. However, these models are not robust and certain issues still need to be resolved. First, the global spatio-temproal context that accounts for the interaction between the target pedestrian and the scene has not been properly utilized. Second, the optimum strategy for fusing different sensor data has not been thoroughly investigated. This work addresses the above limitations by introducing a novel neural network architecture to fuse inherently different spatio-temporal features for pedestrian crossing intention prediction. We fuse different phenomena such as sequences of RGB imagery, semantic segmentation masks, and ego-vehicle speed in an optimum way using attention mechanisms and a stack of recurrent neural networks. The optimum architecture was obtained through exhaustive ablation and comparison studies. Extensive comparative experiments on the JAAD pedestrian action prediction benchmark demonstrate the effectiveness of the proposed method, where state-of-the-art performance was achieved. Our code is open-source and publicly available.