 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating the Robustness of Retrieval-Augmented Generation at the Query Level
Jul 09, 2025Large language models (LLMs) are very costly and inefficient to update with new information. To address this limitation, retrieval-augmented generation (RAG) has been proposed as a solution that dynamically incorporates external knowledge during inference, improving factual consistency and reducing hallucinations. Despite its promise, RAG systems face practical challenges-most notably, a strong dependence on the quality of the input query for accurate retrieval. In this paper, we investigate the sensitivity of different components in the RAG pipeline to various types of query perturbations. Our analysis reveals that the performance of commonly used retrievers can degrade significantly even under minor query variations. We study each module in isolation as well as their combined effect in an end-to-end question answering setting, using both general-domain and domain-specific datasets. Additionally, we propose an evaluation framework to systematically assess the query-level robustness of RAG pipelines and offer actionable recommendations for practitioners based on the results of more than 1092 experiments we performed.
A generic approach for reactive stateful mitigation of application failures in distributed robotics systems deployed with Kubernetes
Oct 24, 2024



Offloading computationally expensive algorithms to the edge or even cloud offers an attractive option to tackle limitations regarding on-board computational and energy resources of robotic systems. In cloud-native applications deployed with the container management system Kubernetes (K8s), one key problem is ensuring resilience against various types of failures. However, complex robotic systems interacting with the physical world pose a very specific set of challenges and requirements that are not yet covered by failure mitigation approaches from the cloud-native domain. In this paper, we therefore propose a novel approach for robotic system monitoring and stateful, reactive failure mitigation for distributed robotic systems deployed using Kubernetes (K8s) and the Robot Operating System (ROS2). By employing the generic substrate of Behaviour Trees, our approach can be applied to any robotic workload and supports arbitrarily complex monitoring and failure mitigation strategies. We demonstrate the effectiveness and application-agnosticism of our approach on two example applications, namely Autonomous Mobile Robot (AMR) navigation and robotic manipulation in a simulated environment.
Scenario Execution for Robotics: A generic, backend-agnostic library for running reproducible robotics experiments and tests
Sep 11, 2024



Testing and evaluation of robotics systems is a difficult and oftentimes tedious task due to the systems' complexity and a lack of tools to conduct reproducible robotics experiments. Additionally, almost all available tools are either tailored towards a specific application domain, simulator or middleware. Particularly scenario-based testing, a common practice in the domain of automated driving, is not sufficiently covered in the robotics domain. In this paper, we propose a novel backend- and middleware-agnostic approach for conducting systematic, reproducible and automatable robotics experiments called Scenario Execution for Robotics. Our approach is implemented as a Python library built on top of the generic scenario description language OpenSCENARIO 2 and Behavior Trees and is made publicly available on GitHub. In extensive experiments, we demonstrate that our approach supports multiple simulators as backend and can be used as a standalone Python-library or as part of the ROS2 ecosystem. Furthermore, we demonstrate how our approach enables testing over ranges of varying values. Finally, we show how Scenario Execution for Robotics allows to move from simulation-based to real-world experiments with minimal adaptations to the scenario description file.
Learning-Based Error Detection System for Advanced Vehicle Instrument Cluster Rendering
Sep 04, 2024The automotive industry is currently expanding digital display options with every new model that comes onto the market. This entails not just an expansion in dimensions, resolution, and customization choices, but also the capability to employ novel display effects like overlays while assembling the content of the display cluster. Unfortunately, this raises the need for appropriate monitoring systems that can detect rendering errors and apply appropriate countermeasures when required. Classical solutions such as Cyclic Redundancy Checks (CRC) will soon be no longer viable as any sort of alpha blending, warping of scaling of content can cause unwanted CRC violations. Therefore, we propose a novel monitoring approach to verify correctness of displayed content using telltales (e.g. warning signs) as example. It uses a learning-based approach to separate "good" telltales, i.e. those that a human driver will understand correctly, and "corrupted" telltales, i.e. those that will not be visible or perceived correctly. As a result, it possesses inherent resilience against individual pixel errors and implicitly supports changing backgrounds, overlay or scaling effects. This is underlined by our experimental study where all "corrupted" test patterns were correctly classified, while no false alarms were triggered.
Situation Monitor: Diversity-Driven Zero-Shot Out-of-Distribution Detection using Budding Ensemble Architecture for Object Detection
Jun 05, 2024We introduce Situation Monitor, a novel zero-shot Out-of-Distribution (OOD) detection approach for transformer-based object detection models to enhance reliability in safety-critical machine learning applications such as autonomous driving. The Situation Monitor utilizes the Diversity-based Budding Ensemble Architecture (DBEA) and increases the OOD performance by integrating a diversity loss into the training process on top of the budding ensemble architecture, detecting Far-OOD samples and minimizing false positives on Near-OOD samples. Moreover, utilizing the resulting DBEA increases the model's OOD performance and improves the calibration of confidence scores, particularly concerning the intersection over union of the detected objects. The DBEA model achieves these advancements with a 14% reduction in trainable parameters compared to the vanilla model. This signifies a substantial improvement in efficiency without compromising the model's ability to detect OOD instances and calibrate the confidence scores accurately.
Global Clipper: Enhancing Safety and Reliability of Transformer-based Object Detection Models
Jun 05, 2024As transformer-based object detection models progress, their impact in critical sectors like autonomous vehicles and aviation is expected to grow. Soft errors causing bit flips during inference have significantly impacted DNN performance, altering predictions. Traditional range restriction solutions for CNNs fall short for transformers. This study introduces the Global Clipper and Global Hybrid Clipper, effective mitigation strategies specifically designed for transformer-based models. It significantly enhances their resilience to soft errors and reduces faulty inferences to ~ 0\%. We also detail extensive testing across over 64 scenarios involving two transformer models (DINO-DETR and Lite-DETR) and two CNN models (YOLOv3 and SSD) using three datasets, totalling approximately 3.3 million inferences, to assess model robustness comprehensively. Moreover, the paper explores unique aspects of attention blocks in transformers and their operational differences from CNNs.
Safe Perception -- A Hierarchical Monitor Approach
Aug 01, 2022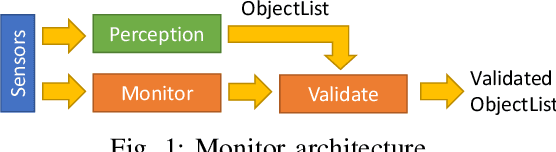

Our transportation world is rapidly transforming induced by an ever increasing level of autonomy. However, to obtain license of fully automated vehicles for widespread public use, it is necessary to assure safety of the entire system, which is still a challenge. This holds in particular for AI-based perception systems that have to handle a diversity of environmental conditions and road users, and at the same time should robustly detect all safety relevant objects (i.e no detection misses should occur). Yet, limited training and validation data make a proof of fault-free operation hardly achievable, as the perception system might be exposed to new, yet unknown objects or conditions on public roads. Hence, new safety approaches for AI-based perception systems are required. For this reason we propose in this paper a novel hierarchical monitoring approach that is able to validate the object list from a primary perception system, can reliably detect detection misses, and at the same time has a very low false alarm rate.
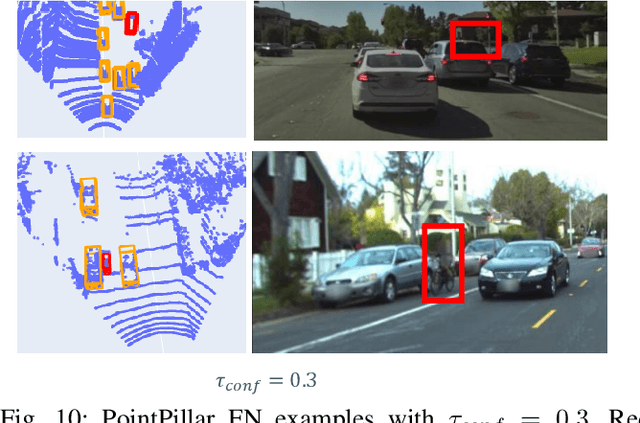
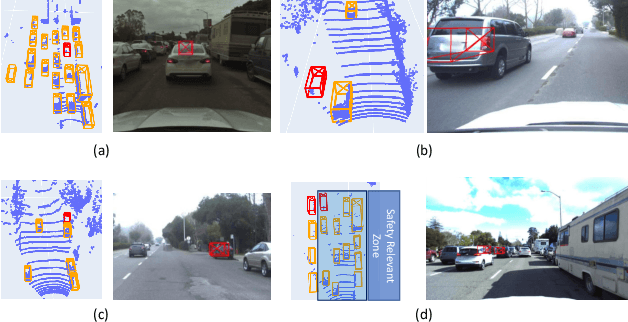
Fault-Tolerant Perception for Automated Driving A Lightweight Monitoring Approach
Nov 24, 2021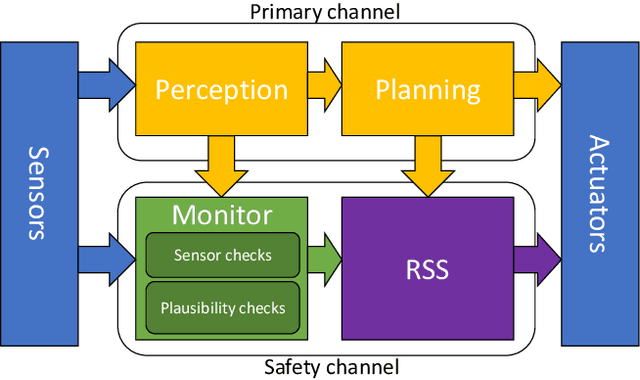
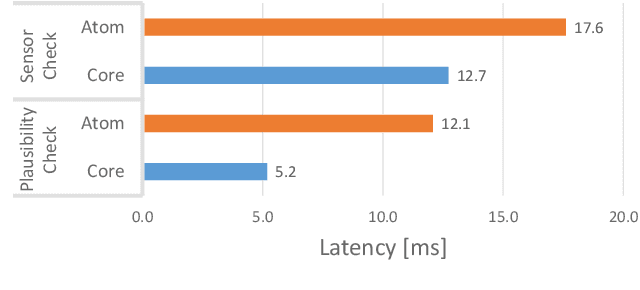
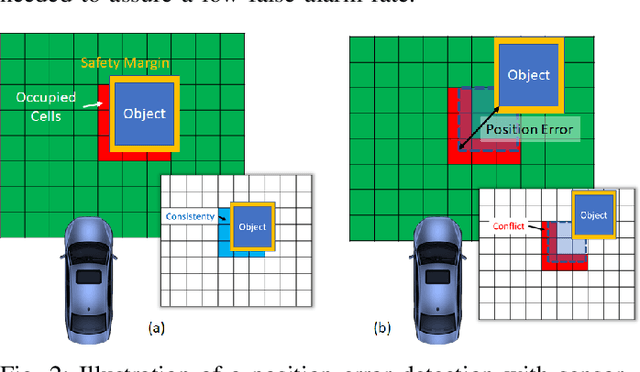
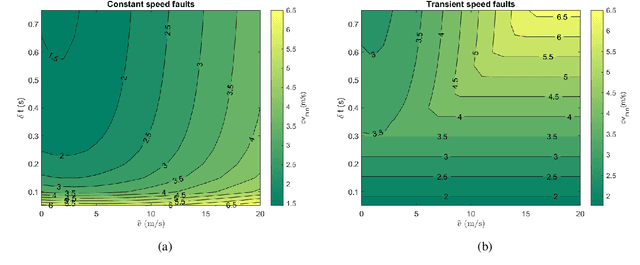
While the most visible part of the safety verification process of automated vehicles concerns the planning and control system, it is often overlooked that safety of the latter crucially depends on the fault-tolerance of the preceding environment perception. Modern perception systems feature complex and often machine-learning-based components with various failure modes that can jeopardize the overall safety. At the same time, a verification by for example redundant execution is not always feasible due to resource constraints. In this paper, we address the need for feasible and efficient perception monitors and propose a lightweight approach that helps to protect the integrity of the perception system while keeping the additional compute overhead minimal. In contrast to existing solutions, the monitor is realized by a well-balanced combination of sensor checks -- here using LiDAR information -- and plausibility checks on the object motion history. It is designed to detect relevant errors in the distance and velocity of objects in the environment of the automated vehicle. In conjunction with an appropriate planning system, such a monitor can help to make safe automated driving feasible.
Robustness of Object Detectors in Degrading Weather Conditions
Jun 16, 2021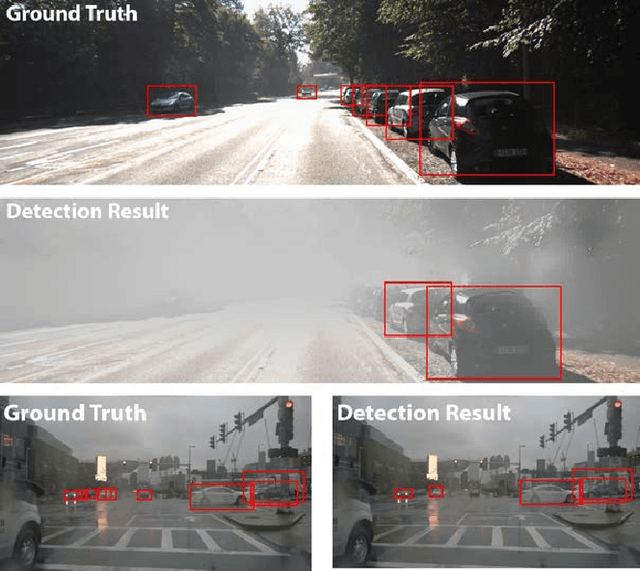
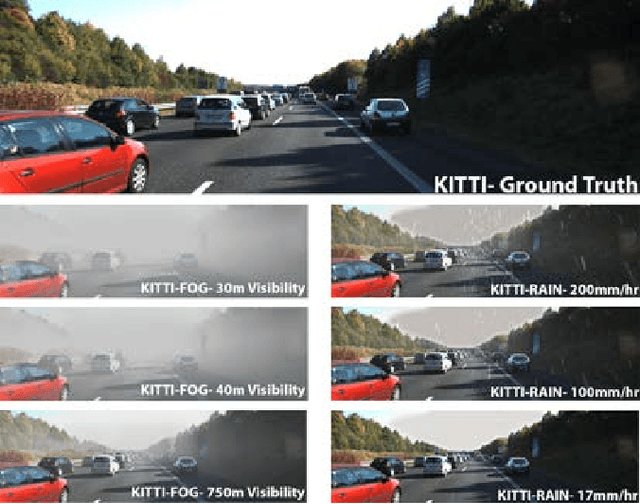
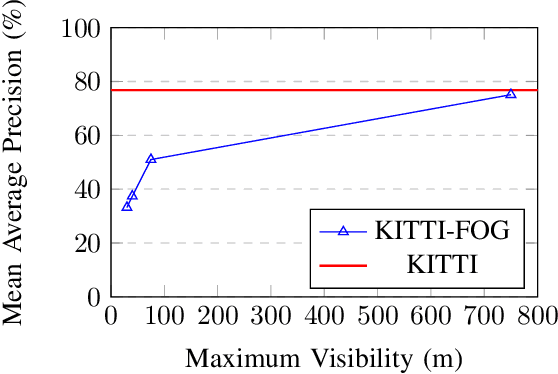
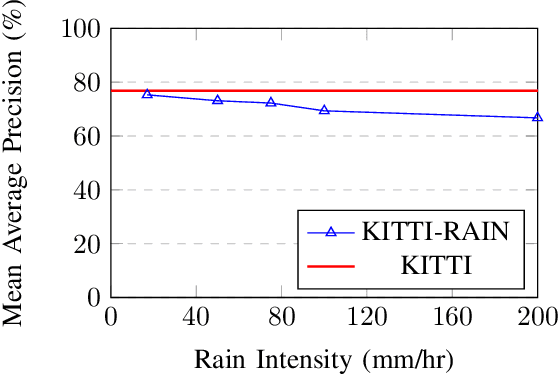
State-of-the-art object detection systems for autonomous driving achieve promising results in clear weather conditions. However, such autonomous safety critical systems also need to work in degrading weather conditions, such as rain, fog and snow. Unfortunately, most approaches evaluate only on the KITTI dataset, which consists only of clear weather scenes. In this paper we address this issue and perform one of the most detailed evaluation on single and dual modality architectures on data captured in real weather conditions. We analyse the performance degradation of these architectures in degrading weather conditions. We demonstrate that an object detection architecture performing good in clear weather might not be able to handle degrading weather conditions. We also perform ablation studies on the dual modality architectures and show their limitations.
Precise localization relative to 3D Automated Driving map using the Decentralized Kalman filter with Feedback
Jul 25, 2019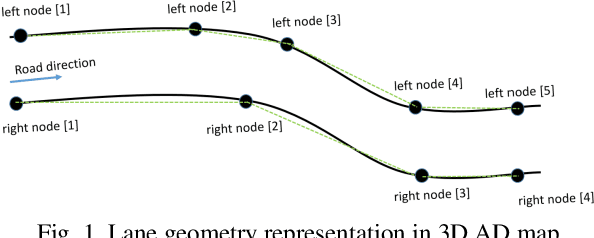
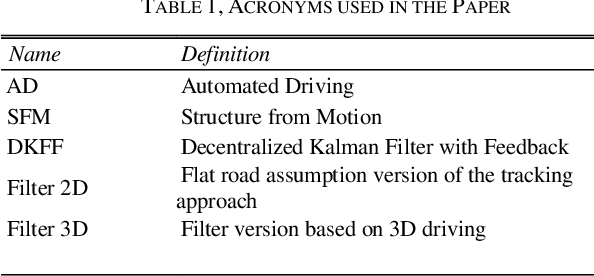
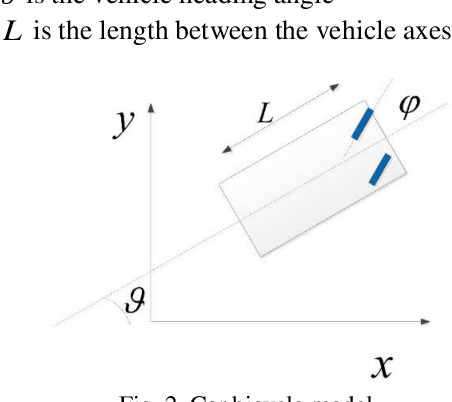
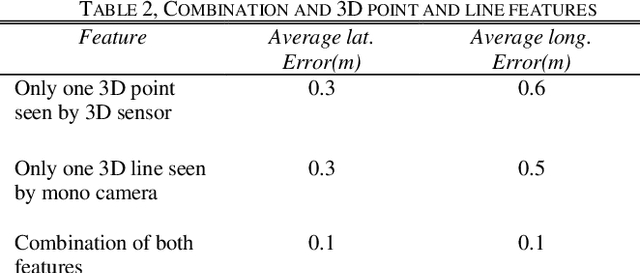
This paper represents the novel high precision localization approach for Automated Driving (AD) relative to 3D map. The AD maps are not necessarily flat. Hence, the problem of localization is solved here in 3D. The vehicle motion is modeled as piecewise planner but with vertical curvature which is approximated with clothoids. The localization problem is solved with Decentralized Kalman filter with feedback (DKFF) by fusing all available information. The odometry, visual odometry, GPS, the different sensor and mono camera inputs are fused together to obtain the precise localization relative to map. Polylines and landmarks from the map are dealt in the same way because of the line - point geometrical duality. A set of weak filters are accumulated in the strong tracking approach leading to the precise localization results.