 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrust-Region Noise Search for Black-Box Alignment of Diffusion and Flow Models
Mar 15, 2026Optimizing the noise samples of diffusion and flow models is an increasingly popular approach to align these models to target rewards at inference time. However, we observe that these approaches are usually restricted to differentiable or cheap reward models, the formulation of the underlying pretrained generative model, or are memory/compute inefficient. We instead propose a simple trust-region based search algorithm (TRS) which treats the pre-trained generative and reward models as a black-box and only optimizes the source noise. Our approach achieves a good balance between global exploration and local exploitation, and is versatile and easily adaptable to various generative settings and reward models with minimal hyperparameter tuning. We evaluate TRS across text-to-image, molecule and protein design tasks, and obtain significantly improved output samples over the base generative models and other inference-time alignment approaches which optimize the source noise sample, or even the entire reverse-time sampling noise trajectories in the case of diffusion models. Our source code is publicly available.
From Variance to Veracity: Unbundling and Mitigating Gradient Variance in Differentiable Bundle Adjustment Layers
Jun 12, 2024



Various pose estimation and tracking problems in robotics can be decomposed into a correspondence estimation problem (often computed using a deep network) followed by a weighted least squares optimization problem to solve for the poses. Recent work has shown that coupling the two problems by iteratively refining one conditioned on the other's output yields SOTA results across domains. However, training these models has proved challenging, requiring a litany of tricks to stabilize and speed up training. In this work, we take the visual odometry problem as an example and identify three plausible causes: (1) flow loss interference, (2) linearization errors in the bundle adjustment (BA) layer, and (3) dependence of weight gradients on the BA residual. We show how these issues result in noisy and higher variance gradients, potentially leading to a slow down in training and instabilities. We then propose a simple, yet effective solution to reduce the gradient variance by using the weights predicted by the network in the inner optimization loop to weight the correspondence objective in the training problem. This helps the training objective `focus' on the more important points, thereby reducing the variance and mitigating the influence of outliers. We show that the resulting method leads to faster training and can be more flexibly trained in varying training setups without sacrificing performance. In particular we show $2$--$2.5\times$ training speedups over a baseline visual odometry model we modify.
Robot Safety Monitoring using Programmable Light Curtains
Apr 04, 2024As factories continue to evolve into collaborative spaces with multiple robots working together with human supervisors in the loop, ensuring safety for all actors involved becomes critical. Currently, laser-based light curtain sensors are widely used in factories for safety monitoring. While these conventional safety sensors meet high accuracy standards, they are difficult to reconfigure and can only monitor a fixed user-defined region of space. Furthermore, they are typically expensive. Instead, we leverage a controllable depth sensor, programmable light curtains (PLC), to develop an inexpensive and flexible real-time safety monitoring system for collaborative robot workspaces. Our system projects virtual dynamic safety envelopes that tightly envelop the moving robot at all times and detect any objects that intrude the envelope. Furthermore, we develop an instrumentation algorithm that optimally places (multiple) PLCs in a workspace to maximize the visibility coverage of robots. Our work enables fence-less human-robot collaboration, while scaling to monitor multiple robots with few sensors. We analyze our system in a real manufacturing testbed with four robot arms and demonstrate its capabilities as a fast, accurate, and inexpensive safety monitoring solution.
Learnable Spatio-Temporal Map Embeddings for Deep Inertial Localization
Nov 14, 2022



Indoor localization systems often fuse inertial odometry with map information via hand-defined methods to reduce odometry drift, but such methods are sensitive to noise and struggle to generalize across odometry sources. To address the robustness problem in map utilization, we propose a data-driven prior on possible user locations in a map by combining learned spatial map embeddings and temporal odometry embeddings. Our prior learns to encode which map regions are feasible locations for a user more accurately than previous hand-defined methods. This prior leads to a 49% improvement in inertial-only localization accuracy when used in a particle filter. This result is significant, as it shows that our relative positioning method can match the performance of absolute positioning using bluetooth beacons. To show the generalizability of our method, we also show similar improvements using wheel encoder odometry.
RP-VIO: Robust Plane-based Visual-Inertial Odometry for Dynamic Environments
Mar 18, 2021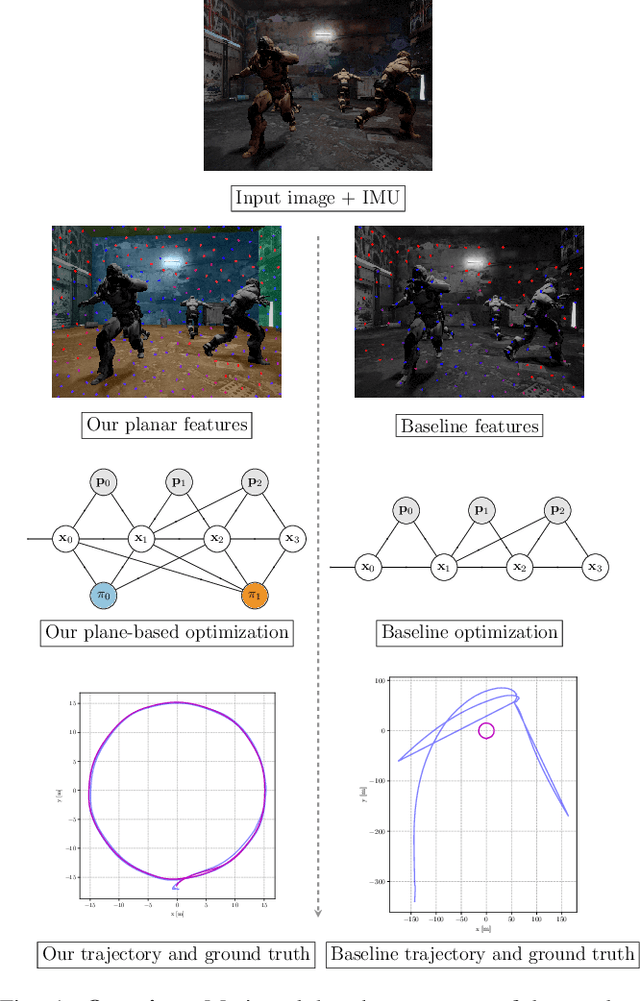
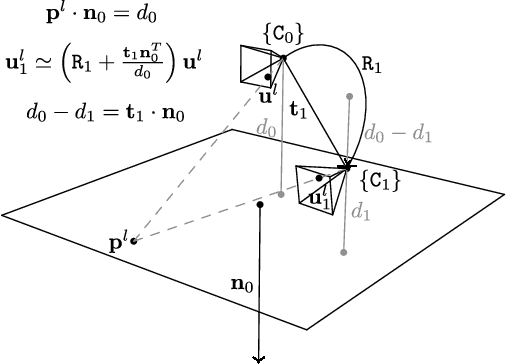
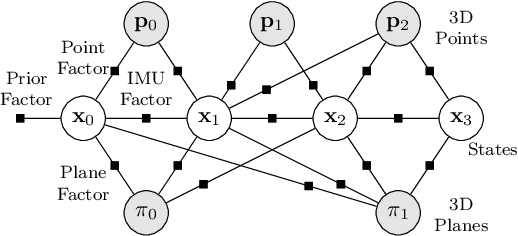
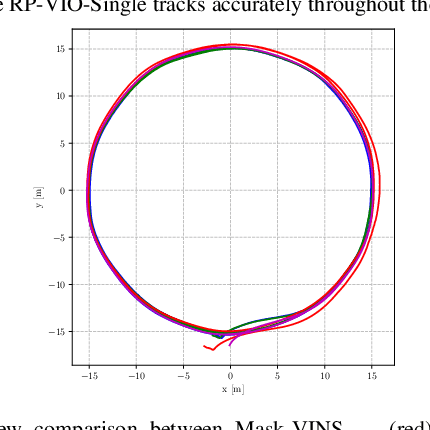
Modern visual-inertial navigation systems (VINS) are faced with a critical challenge in real-world deployment: they need to operate reliably and robustly in highly dynamic environments. Current best solutions merely filter dynamic objects as outliers based on the semantics of the object category. Such an approach does not scale as it requires semantic classifiers to encompass all possibly-moving object classes; this is hard to define, let alone deploy. On the other hand, many real-world environments exhibit strong structural regularities in the form of planes such as walls and ground surfaces, which are also crucially static. We present RP-VIO, a monocular visual-inertial odometry system that leverages the simple geometry of these planes for improved robustness and accuracy in challenging dynamic environments. Since existing datasets have a limited number of dynamic elements, we also present a highly-dynamic, photorealistic synthetic dataset for a more effective evaluation of the capabilities of modern VINS systems. We evaluate our approach on this dataset, and three diverse sequences from standard datasets including two real-world dynamic sequences and show a significant improvement in robustness and accuracy over a state-of-the-art monocular visual-inertial odometry system. We also show in simulation an improvement over a simple dynamic-features masking approach. Our code and dataset are publicly available.