 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimWeaver: Zero-Shot RGB Sim-to-Real for Deformable Manipulation
Jun 13, 2026RGB sim-to-real for deformable manipulation has remained largely unsolved without real-world fine-tuning. We present SimWeaver, which trains zero-shot RGB VLA policies on 200 simulated demonstrations per task, reaching above 80% per-task and 91% average real-world success across 5 diverse deformable tasks including plastic-bag manipulation, without teleoperation or per-task calibration. SimWeaver combines a reliable measurement-backed simulator (SimWeaver-Sim) with an extensible asset framework supporting single-image generation(SimWeaver-Asset), a deterministic topology-aware trajectory synthesizer (SimWeaver-Syn), and a sim-to-real protocol with ISP-aware photometric augmentation (SimWeaver-Real). On silk grasping, the sim-trained policy reaches 100% under visual distribution shifts where real-data baselines drop to 9-70%, at two orders of magnitude lower per-trajectory cost. We will release SimWeaver and a representative asset subset. Project page: https://simweaver.github.io/
Grasp State Assessment of Deformable Objects Using Visual-Tactile Fusion Perception
Jun 23, 2020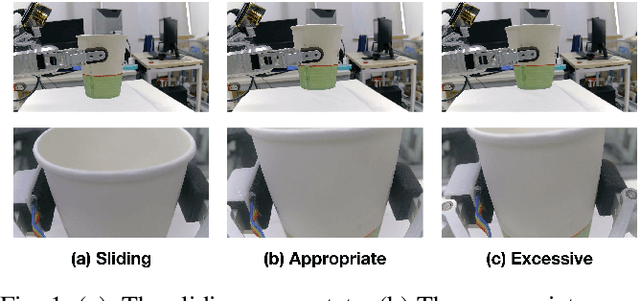
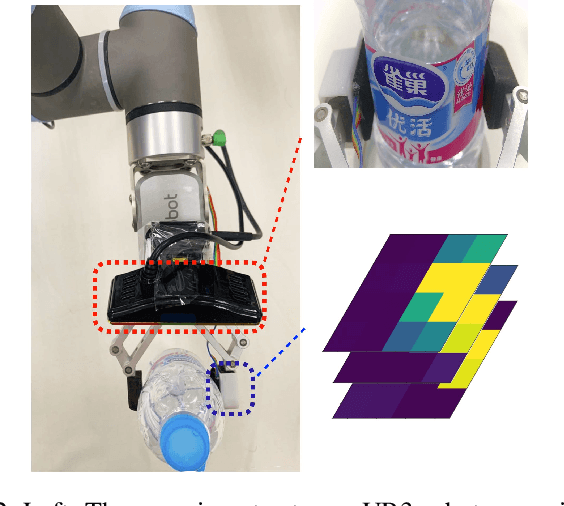
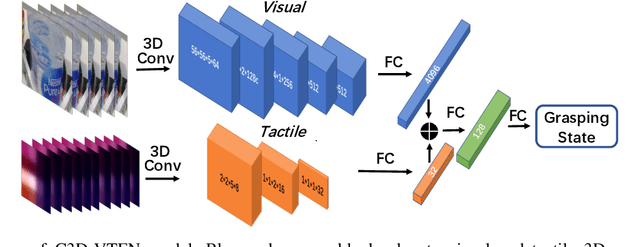
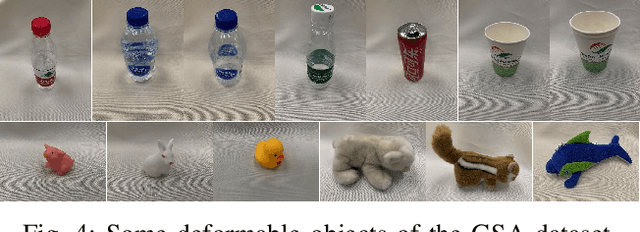
Humans can quickly determine the force required to grasp a deformable object to prevent its sliding or excessive deformation through vision and touch, which is still a challenging task for robots. To address this issue, we propose a novel 3D convolution-based visual-tactile fusion deep neural network (C3D-VTFN) to evaluate the grasp state of various deformable objects in this paper. Specifically, we divide the grasp states of deformable objects into three categories of sliding, appropriate and excessive. Also, a dataset for training and testing the proposed network is built by extensive grasping and lifting experiments with different widths and forces on 16 various deformable objects with a robotic arm equipped with a wrist camera and a tactile sensor. As a result, a classification accuracy as high as 99.97% is achieved. Furthermore, some delicate grasp experiments based on the proposed network are implemented in this paper. The experimental results demonstrate that the C3D-VTFN is accurate and efficient enough for grasp state assessment, which can be widely applied to automatic force control, adaptive grasping, and other visual-tactile spatiotemporal sequence learning problems.