 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeECO: Energy-Constrained Optimization with Reinforcement Learning for Humanoid Walking
Feb 06, 2026Achieving stable and energy-efficient locomotion is essential for humanoid robots to operate continuously in real-world applications. Existing MPC and RL approaches often rely on energy-related metrics embedded within a multi-objective optimization framework, which require extensive hyperparameter tuning and often result in suboptimal policies. To address these challenges, we propose ECO (Energy-Constrained Optimization), a constrained RL framework that separates energy-related metrics from rewards, reformulating them as explicit inequality constraints. This method provides a clear and interpretable physical representation of energy costs, enabling more efficient and intuitive hyperparameter tuning for improved energy efficiency. ECO introduces dedicated constraints for energy consumption and reference motion, enforced by the Lagrangian method, to achieve stable, symmetric, and energy-efficient walking for humanoid robots. We evaluated ECO against MPC, standard RL with reward shaping, and four state-of-the-art constrained RL methods. Experiments, including sim-to-sim and sim-to-real transfers on the kid-sized humanoid robot BRUCE, demonstrate that ECO significantly reduces energy consumption compared to baselines while maintaining robust walking performance. These results highlight a substantial advancement in energy-efficient humanoid locomotion. All experimental demonstrations can be found on the project website: https://sites.google.com/view/eco-humanoid.
HuB: Learning Extreme Humanoid Balance
May 12, 2025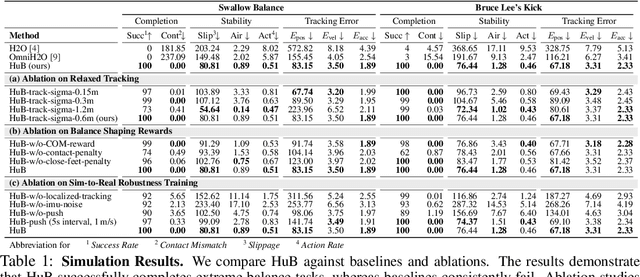
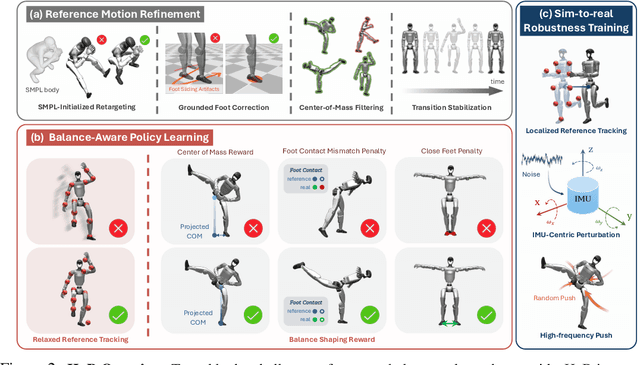
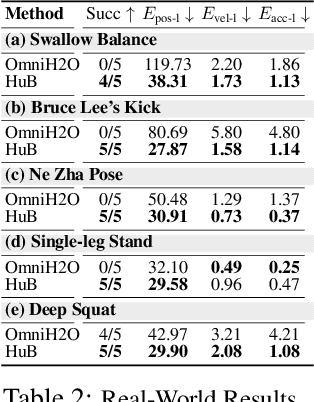
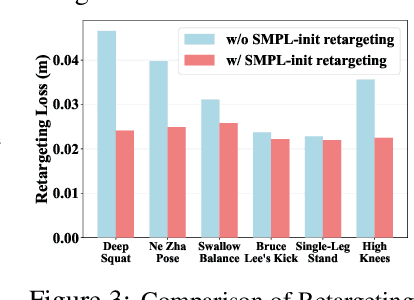
The human body demonstrates exceptional motor capabilities-such as standing steadily on one foot or performing a high kick with the leg raised over 1.5 meters-both requiring precise balance control. While recent research on humanoid control has leveraged reinforcement learning to track human motions for skill acquisition, applying this paradigm to balance-intensive tasks remains challenging. In this work, we identify three key obstacles: instability from reference motion errors, learning difficulties due to morphological mismatch, and the sim-to-real gap caused by sensor noise and unmodeled dynamics. To address these challenges, we propose HuB (Humanoid Balance), a unified framework that integrates reference motion refinement, balance-aware policy learning, and sim-to-real robustness training, with each component targeting a specific challenge. We validate our approach on the Unitree G1 humanoid robot across challenging quasi-static balance tasks, including extreme single-legged poses such as Swallow Balance and Bruce Lee's Kick. Our policy remains stable even under strong physical disturbances-such as a forceful soccer strike-while baseline methods consistently fail to complete these tasks. Project website: https://hub-robot.github.io
SKIL: Semantic Keypoint Imitation Learning for Generalizable Data-efficient Manipulation
Jan 24, 2025Real-world tasks such as garment manipulation and table rearrangement demand robots to perform generalizable, highly precise, and long-horizon actions. Although imitation learning has proven to be an effective approach for teaching robots new skills, large amounts of expert demonstration data are still indispensible for these complex tasks, resulting in high sample complexity and costly data collection. To address this, we propose Semantic Keypoint Imitation Learning (SKIL), a framework which automatically obtain semantic keypoints with help of vision foundation models, and forms the descriptor of semantic keypoints that enables effecient imitation learning of complex robotic tasks with significantly lower sample complexity. In real world experiments, SKIL doubles the performance of baseline methods in tasks such as picking a cup or mouse, while demonstrating exceptional robustness to variations in objects, environmental changes, and distractors. For long-horizon tasks like hanging a towel on a rack where previous methods fail completely, SKIL achieves a mean success rate of 70\% with as few as 30 demonstrations. Furthermore, SKIL naturally supports cross-embodiment learning due to its semantic keypoints abstraction, our experiments demonstrate that even human videos bring considerable improvement to the learning performance. All these results demonstrate the great success of SKIL in achieving data-efficint generalizable robotic learning. Visualizations and code are available at: https://skil-robotics.github.io/SKIL-robotics/.