 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuB: Learning Extreme Humanoid Balance
Paper and Code
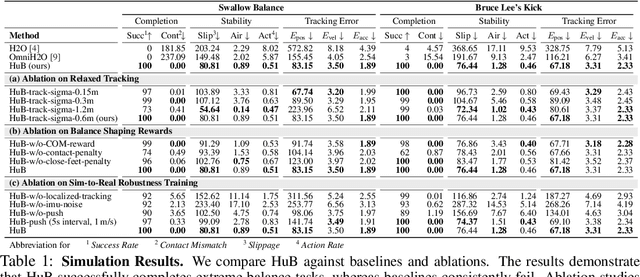
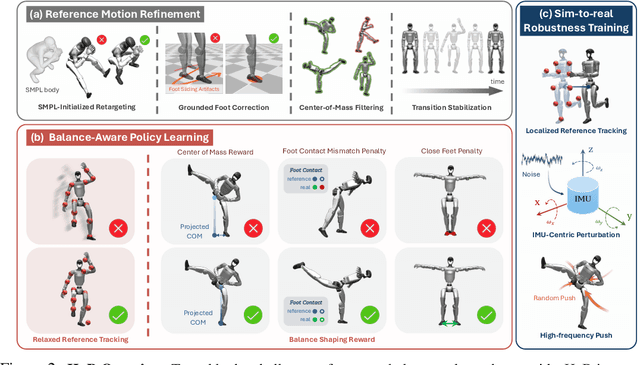
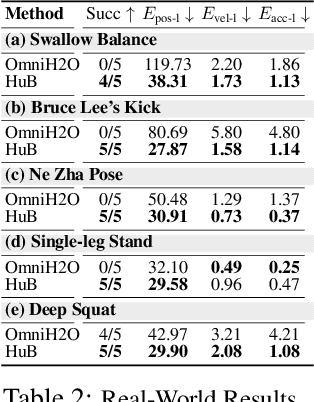
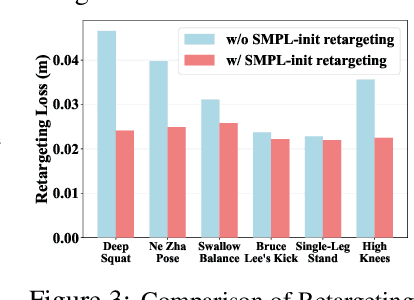
The human body demonstrates exceptional motor capabilities-such as standing steadily on one foot or performing a high kick with the leg raised over 1.5 meters-both requiring precise balance control. While recent research on humanoid control has leveraged reinforcement learning to track human motions for skill acquisition, applying this paradigm to balance-intensive tasks remains challenging. In this work, we identify three key obstacles: instability from reference motion errors, learning difficulties due to morphological mismatch, and the sim-to-real gap caused by sensor noise and unmodeled dynamics. To address these challenges, we propose HuB (Humanoid Balance), a unified framework that integrates reference motion refinement, balance-aware policy learning, and sim-to-real robustness training, with each component targeting a specific challenge. We validate our approach on the Unitree G1 humanoid robot across challenging quasi-static balance tasks, including extreme single-legged poses such as Swallow Balance and Bruce Lee's Kick. Our policy remains stable even under strong physical disturbances-such as a forceful soccer strike-while baseline methods consistently fail to complete these tasks. Project website: https://hub-robot.github.io