 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTabICLv2: A better, faster, scalable, and open tabular foundation model
Feb 11, 2026Tabular foundation models, such as TabPFNv2 and TabICL, have recently dethroned gradient-boosted trees at the top of predictive benchmarks, demonstrating the value of in-context learning for tabular data. We introduce TabICLv2, a new state-of-the-art foundation model for regression and classification built on three pillars: (1) a novel synthetic data generation engine designed for high pretraining diversity; (2) various architectural innovations, including a new scalable softmax in attention improving generalization to larger datasets without prohibitive long-sequence pretraining; and (3) optimized pretraining protocols, notably replacing AdamW with the Muon optimizer. On the TabArena and TALENT benchmarks, TabICLv2 without any tuning surpasses the performance of the current state of the art, RealTabPFN-2.5 (hyperparameter-tuned, ensembled, and fine-tuned on real data). With only moderate pretraining compute, TabICLv2 generalizes effectively to million-scale datasets under 50GB GPU memory while being markedly faster than RealTabPFN-2.5. We provide extensive ablation studies to quantify these contributions and commit to open research by first releasing inference code and model weights at https://github.com/soda-inria/tabicl, with synthetic data engine and pretraining code to follow.
Learning-based Airflow Inertial Odometry for MAVs using Thermal Anemometers in a GPS and vision denied environment
May 21, 2025This work demonstrates an airflow inertial based odometry system with multi-sensor data fusion, including thermal anemometer, IMU, ESC, and barometer. This goal is challenging because low-cost IMUs and barometers have significant bias, and anemometer measurements are very susceptible to interference from spinning propellers and ground effects. We employ a GRU-based deep neural network to estimate relative air speed from noisy and disturbed anemometer measurements, and an observer with bias model to fuse the sensor data and thus estimate the state of aerial vehicle. A complete flight data, including takeoff and landing on the ground, shows that the approach is able to decouple the downwash induced wind speed caused by propellers and the ground effect, and accurately estimate the flight speed in a wind-free indoor environment. IMU, and barometer bias are effectively estimated, which significantly reduces the position integration drift, which is only 5.7m for 203s manual random flight. The open source is available on https://github.com/SyRoCo-ISIR/Flight-Speed-Estimation-Airflow.
Histo-Planner: A Real-time Local Planner for MAVs Teleoperation based on Histogram of Obstacle Distribution
May 21, 2025This paper concerns real-time obstacle avoidance for micro aerial vehicles (MAVs). Motivated by teleoperation applications in cluttered environments with limited computational power, we propose a local planner that does not require the knowledge or construction of a global map of the obstacles. The proposed solution consists of a real-time trajectory planning algorithm that relies on the histogram of obstacle distribution and a planner manager that triggers different planning modes depending on obstacles location around the MAV. The proposed solution is validated, for a teleoperation application, with both simulations and indoor experiments. Benchmark comparisons based on a designed simulation platform are also provided.
TabICL: A Tabular Foundation Model for In-Context Learning on Large Data
Feb 08, 2025



The long-standing dominance of gradient-boosted decision trees on tabular data is currently challenged by tabular foundation models using In-Context Learning (ICL): setting the training data as context for the test data and predicting in a single forward pass without parameter updates. While the very recent TabPFNv2 foundation model (2025) excels on tables with up to 10K samples, its alternating column- and row-wise attentions make handling large training sets computationally prohibitive. So, can ICL be effectively scaled and deliver a benefit for larger tables? We introduce TabICL, a tabular foundation model for classification, pretrained on synthetic datasets with up to 60K samples and capable of handling 500K samples on affordable resources. This is enabled by a novel two-stage architecture: a column-then-row attention mechanism to build fixed-dimensional embeddings of rows, followed by a transformer for efficient ICL. Across 200 classification datasets from the TALENT benchmark, TabICL is on par with TabPFNv2 while being systematically faster (up to 10 times), and significantly outperforms all other approaches. On 56 datasets with over 10K samples, TabICL surpasses both TabPFNv2 and CatBoost, demonstrating the potential of ICL for large data.
HMOE: Hypernetwork-based Mixture of Experts for Domain Generalization
Nov 15, 2022



Due to the domain shift, machine learning systems typically fail to generalize well to domains different from those of training data, which is the problem that domain generalization (DG) aims to address. However, most mainstream DG algorithms lack interpretability and require domain labels, which are not available in many real-world scenarios. In this work, we propose a novel DG method, HMOE: Hypernetwork-based Mixture of Experts (MoE), that does not require domain labels and is more interpretable. We use hypernetworks to generate the weights of experts, allowing experts to share some useful meta-knowledge. MoE has proven adept at detecting and identifying heterogeneous patterns in data. For DG, heterogeneity exactly arises from the domain shift. We compare HMOE with other DG algorithms under a fair and unified benchmark-DomainBed. Extensive experiments show that HMOE can perform latent domain discovery from data of mixed domains and divide it into distinct clusters that are surprisingly more consistent with human intuition than original domain labels. Compared to other DG methods, HMOE shows competitive performance and achieves SOTA results in some cases without using domain labels.
PTFlash : A deep learning framework for isothermal two-phase equilibrium calculations
May 19, 2022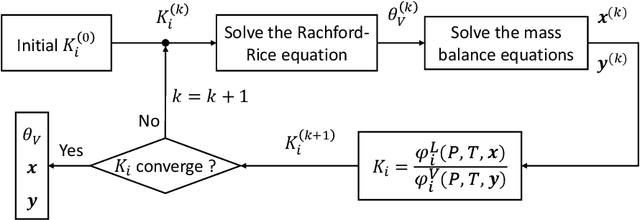
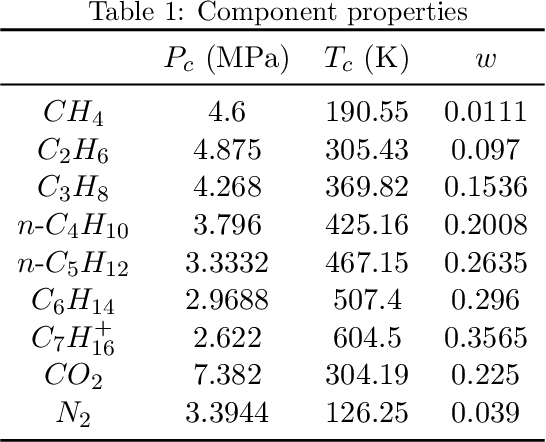
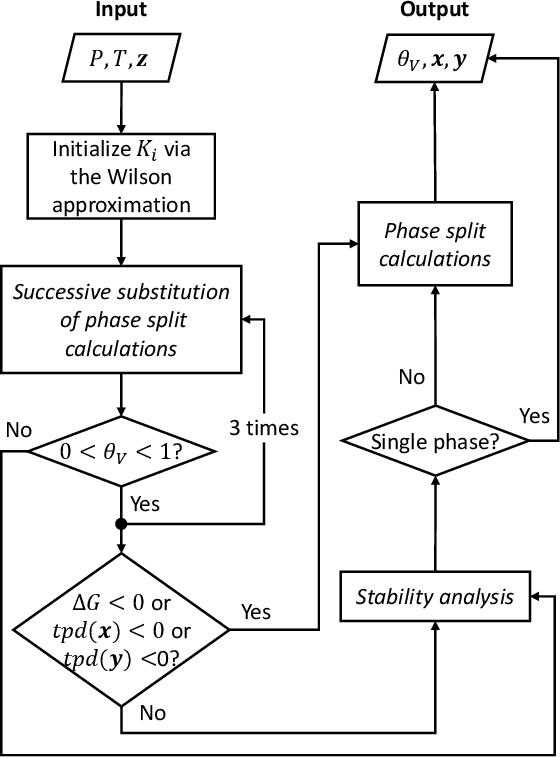
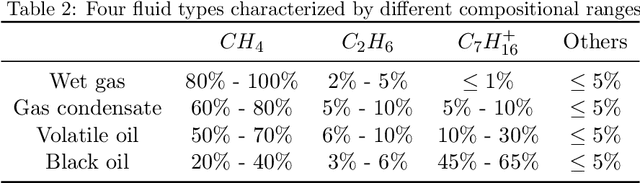
Phase equilibrium calculations are an essential part of numerical simulations of multi-component multi-phase flow in porous media, accounting for the largest share of the computational time. In this work, we introduce a GPUenabled, fast, and parallel framework, PTFlash, that vectorizes algorithms required for isothermal two-phase flash calculations using PyTorch, and can facilitate a wide range of downstream applications. In addition, to further accelerate PTFlash, we design two task-specific neural networks, one for predicting the stability of given mixtures and the other for providing estimates of the distribution coefficients, which are trained offline and help shorten computation time by sidestepping stability analysis and reducing the number of iterations to reach convergence. The evaluation of PTFlash was conducted on three case studies involving hydrocarbons, CO 2 and N 2 , for which the phase equilibrium was tested over a large range of temperature, pressure and composition conditions, using the Soave-Redlich-Kwong (SRK) equation of state. We compare PTFlash with an in-house thermodynamic library, Carnot, written in C++ and performing flash calculations one by one on CPU. Results show speed-ups on large scale calculations up to two order of magnitudes, while maintaining perfect precision with the reference solution provided by Carnot.