 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Airflow Inertial Odometry for MAVs using Thermal Anemometers in a GPS and vision denied environment
May 21, 2025This work demonstrates an airflow inertial based odometry system with multi-sensor data fusion, including thermal anemometer, IMU, ESC, and barometer. This goal is challenging because low-cost IMUs and barometers have significant bias, and anemometer measurements are very susceptible to interference from spinning propellers and ground effects. We employ a GRU-based deep neural network to estimate relative air speed from noisy and disturbed anemometer measurements, and an observer with bias model to fuse the sensor data and thus estimate the state of aerial vehicle. A complete flight data, including takeoff and landing on the ground, shows that the approach is able to decouple the downwash induced wind speed caused by propellers and the ground effect, and accurately estimate the flight speed in a wind-free indoor environment. IMU, and barometer bias are effectively estimated, which significantly reduces the position integration drift, which is only 5.7m for 203s manual random flight. The open source is available on https://github.com/SyRoCo-ISIR/Flight-Speed-Estimation-Airflow.
Histo-Planner: A Real-time Local Planner for MAVs Teleoperation based on Histogram of Obstacle Distribution
May 21, 2025This paper concerns real-time obstacle avoidance for micro aerial vehicles (MAVs). Motivated by teleoperation applications in cluttered environments with limited computational power, we propose a local planner that does not require the knowledge or construction of a global map of the obstacles. The proposed solution consists of a real-time trajectory planning algorithm that relies on the histogram of obstacle distribution and a planner manager that triggers different planning modes depending on obstacles location around the MAV. The proposed solution is validated, for a teleoperation application, with both simulations and indoor experiments. Benchmark comparisons based on a designed simulation platform are also provided.
Feature-based Recursive Observer Design for Homography Estimation
Jun 09, 2016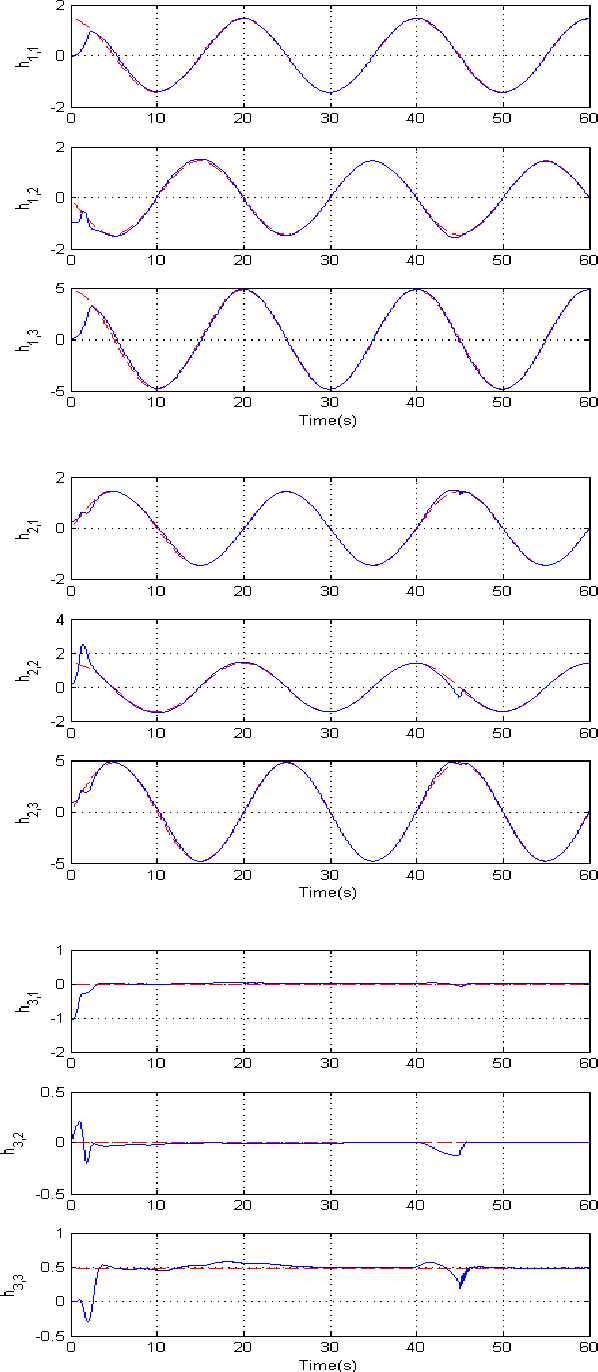
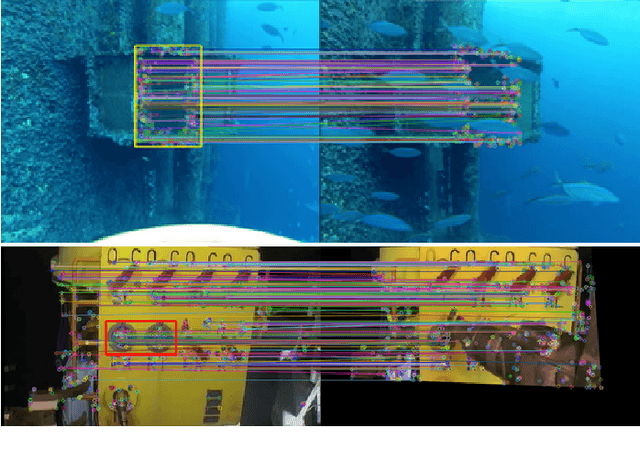
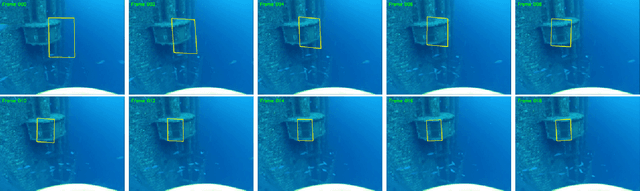
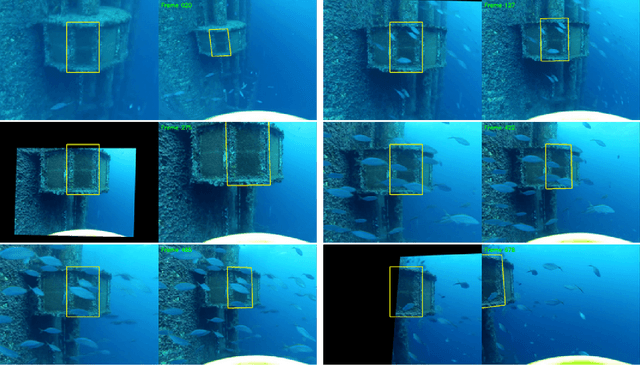
This paper presents a new algorithm for online estimation of a sequence of homographies applicable to image sequences obtained from robotic vehicles equipped with vision sensors. The approach taken exploits the underlying Special Linear group structure of the set of homographies along with gyroscope measurements and direct point-feature correspondences between images to develop temporal filter for the homography estimate. Theoretical analysis and experimental results are provided to demonstrate the robustness of the proposed algorithm. The experimental results show excellent performance even in the case of very fast camera motion (relative to frame rate), severe occlusion, and in the presence of specular reflections.