 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResearch on a Camera Position Measurement Method based on a Parallel Perspective Error Transfer Model
Feb 08, 2026Camera pose estimation from sparse correspondences is a fundamental problem in geometric computer vision and remains particularly challenging in near-field scenarios, where strong perspective effects and heterogeneous measurement noise can significantly degrade the stability of analytic PnP solutions. In this paper, we present a geometric error propagation framework for camera pose estimation based on a parallel perspective approximation. By explicitly modeling how image measurement errors propagate through perspective geometry, we derive an error transfer model that characterizes the relationship between feature point distribution, camera depth, and pose estimation uncertainty. Building on this analysis, we develop a pose estimation method that leverages parallel perspective initialization and error-aware weighting within a Gauss-Newton optimization scheme, leading to improved robustness in proximity operations. Extensive experiments on both synthetic data and real-world images, covering diverse conditions such as strong illumination, surgical lighting, and underwater low-light environments, demonstrate that the proposed approach achieves accuracy and robustness comparable to state-of-the-art analytic and iterative PnP methods, while maintaining high computational efficiency. These results highlight the importance of explicit geometric error modeling for reliable camera pose estimation in challenging near-field settings.
TEeVTOL: Balancing Energy and Time Efficiency in eVTOL Aircraft Path Planning Across City-Scale Wind Fields
Mar 21, 2024



Electric vertical-takeoff and landing (eVTOL) aircraft, recognized for their maneuverability and flexibility, offer a promising alternative to our transportation system. However, the operational effectiveness of these aircraft faces many challenges, such as the delicate balance between energy and time efficiency, stemming from unpredictable environmental factors, including wind fields. Mathematical modeling-based approaches have been adopted to plan aircraft flight path in urban wind fields with the goal to save energy and time costs. While effective, they are limited in adapting to dynamic and complex environments. To optimize energy and time efficiency in eVTOL's flight through dynamic wind fields, we introduce a novel path planning method leveraging deep reinforcement learning. We assess our method with extensive experiments, comparing it to Dijkstra's algorithm -- the theoretically optimal approach for determining shortest paths in a weighted graph, where weights represent either energy or time cost. The results show that our method achieves a graceful balance between energy and time efficiency, closely resembling the theoretically optimal values for both objectives.
Unsupervised Trajectory Segmentation and Promoting of Multi-Modal Surgical Demonstrations
Oct 01, 2018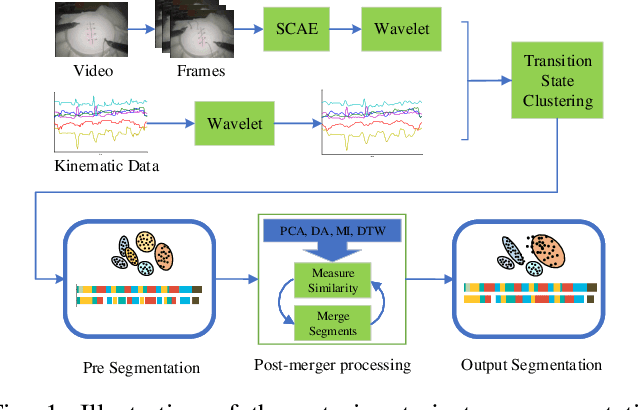
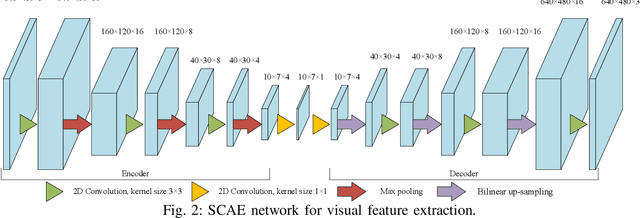
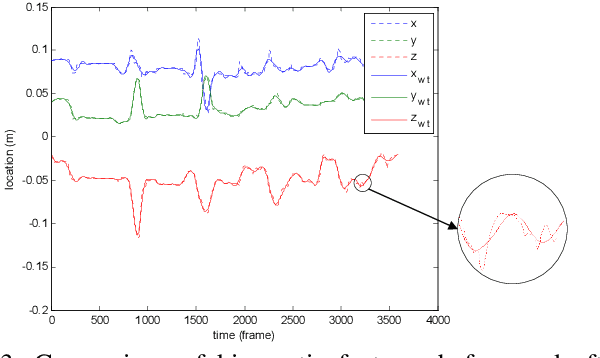
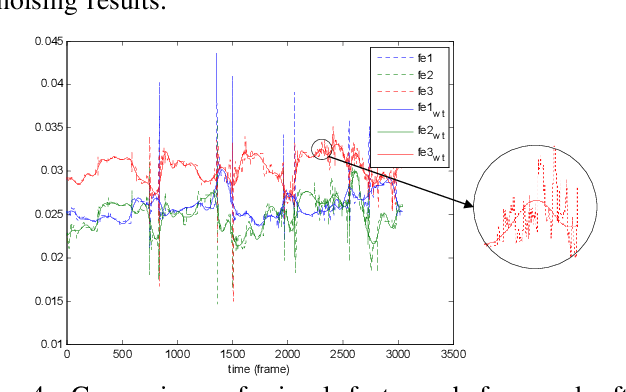
To improve the efficiency of surgical trajectory segmentation for robot learning in robot-assisted minimally invasive surgery, this paper presents a fast unsupervised method using video and kinematic data, followed by a promoting procedure to address the over-segmentation issue. Unsupervised deep learning network, stacking convolutional auto-encoder, is employed to extract more discriminative features from videos in an effective way. To further improve the accuracy of segmentation, on one hand, wavelet transform is used to filter out the noises existed in the features from video and kinematic data. On the other hand, the segmentation result is promoted by identifying the adjacent segments with no state transition based on the predefined similarity measurements. Extensive experiments on a public dataset JIGSAWS show that our method achieves much higher accuracy of segmentation than state-of-the-art methods in the shorter time.