 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMiMo-V2-Flash Technical Report
Jan 08, 2026We present MiMo-V2-Flash, a Mixture-of-Experts (MoE) model with 309B total parameters and 15B active parameters, designed for fast, strong reasoning and agentic capabilities. MiMo-V2-Flash adopts a hybrid attention architecture that interleaves Sliding Window Attention (SWA) with global attention, with a 128-token sliding window under a 5:1 hybrid ratio. The model is pre-trained on 27 trillion tokens with Multi-Token Prediction (MTP), employing a native 32k context length and subsequently extended to 256k. To efficiently scale post-training compute, MiMo-V2-Flash introduces a novel Multi-Teacher On-Policy Distillation (MOPD) paradigm. In this framework, domain-specialized teachers (e.g., trained via large-scale reinforcement learning) provide dense and token-level reward, enabling the student model to perfectly master teacher expertise. MiMo-V2-Flash rivals top-tier open-weight models such as DeepSeek-V3.2 and Kimi-K2, despite using only 1/2 and 1/3 of their total parameters, respectively. During inference, by repurposing MTP as a draft model for speculative decoding, MiMo-V2-Flash achieves up to 3.6 acceptance length and 2.6x decoding speedup with three MTP layers. We open-source both the model weights and the three-layer MTP weights to foster open research and community collaboration.
Selective Noise Suppression in Random SVPWM to Shape the Voltage and Current Spectrum
Feb 16, 2023The conventional space vector pulse width modulation (CSVPWM) is widely used in AC motor powered by two-level three-phase inverter, resulting in sideband noise near the switching frequency and its integer multiples in the motor. Random switching frequency space vector pulse width modulation (RF-SVPWM) and random pulse position space vector pulse width modulation (RP-SVPWM) can spread the voltage spectrum to eliminate sideband noise. However, the sideband electromagnetic force is broadband, and these methods increase the possibility that the motor will resonate at the modal frequency. In this paper, two novel selective noise suppression methods at specific frequency are proposed. The first method is to build the relationship between the pulse position and duty cycle. The simulation results show that a gap in Power Spectrum Density (PSD) at specific frequency can be achieved in the low modulation index. The second method combines RF-SVPWM and RP-SVPWM to build the relationship of the switching frequency, pulse position and duty cycle. And the simulation results show that selective noise suppression at specific frequency can be achieved with the advantage of wide modulation index range. The proposed methods provide a reference to eliminate the electromagnetic noise at the modal frequencies in motors.
G$ \mathbf{^2} $VD Planner: An Efficient Motion Planning Approach With Grid-based Generalized Voronoi Diagrams
Feb 01, 2022



In this letter, an efficient motion planning approach with grid-based generalized Voronoi diagrams is newly proposed for mobile robots. Different from existing approaches, the novelty of this work is twofold: 1) a new state lattice-based path searching approach is proposed, in which the search space is reduced to a Voronoi corridor to further improve the search efficiency, along with a Voronoi potential field constructed to make the searched path keep a reasonable distance from obstacles to provide sufficient optimization margin for the subsequent path smoothing, and 2) an efficient quadratic programming-based path smoothing approach is presented, wherein the clearance to obstacles is considered in the form of the penalty of the deviation from the safe reference path to improve the path clearance of hard-constrained path smoothing approaches. We validate the efficiency and smoothness of our approach in various challenging simulation scenarios and large-scale outdoor environments. It is shown that the computational efficiency is improved by 17.1% in the path searching stage, and smoothing the path with our approach is 11.86 times faster than a recent gradient-based path smoothing approach. We will release the source code to the robotics community.
EffMoP: Efficient Motion Planning Based on Heuristic-Guided Motion Primitives Pruning and Path Optimization With Sparse-Banded Structure
Dec 16, 2020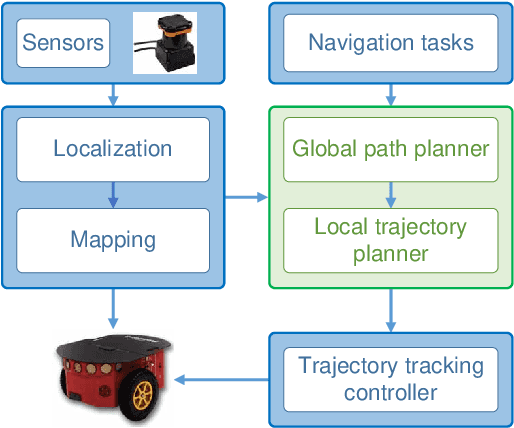
To solve the autonomous navigation problem in complex environments, an efficient motion planning approach called EffMoP is presented in this paper. Considering the challenges from large-scale, partially unknown complex environments, a three-layer motion planning framework is elaborately designed, including global path planning, local path optimization, and time-optimal velocity planning. Compared with existing approaches, the novelty of this work is twofold: 1) a heuristic-guided pruning strategy of motion primitives is newly designed and fully integrated into the search-based global path planner to improve the computational efficiency of graph search, and 2) a novel soft-constrained local path optimization approach is proposed, wherein the sparse-banded system structure of the underlying optimization problem is fully exploited to efficiently solve the problem. We validate the safety, smoothness, flexibility, and efficiency of EffMoP in various complex simulation scenarios and challenging real-world tasks. It is shown that the computational efficiency is improved by 66.21% in the global planning stage and the motion efficiency of the robot is improved by 22.87% compared with the recent quintic B\'{e}zier curve-based state space sampling approach.
MRPB 1.0: A Unified Benchmark for the Evaluation of Mobile Robot Local Planning Approaches
Nov 01, 2020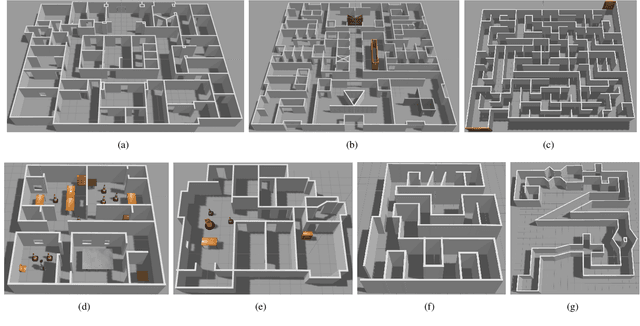
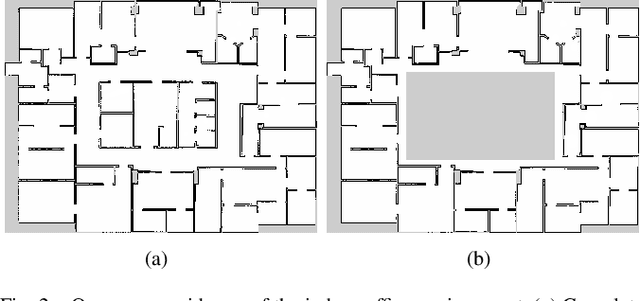
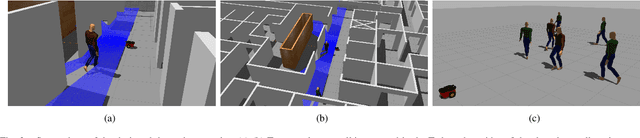

Local planning is one of the key technologies for mobile robots to achieve full autonomy and has been widely investigated. To evaluate mobile robot local planning approaches in a unified and comprehensive way, a mobile robot local planning benchmark called MRPB 1.0 is newly proposed in this paper. The benchmark facilitates both motion planning researchers who want to compare the performance of a new local planner relative to many other state-of-the-art approaches as well as end users in the mobile robotics industry who want to select a local planner that performs best on some problems of interest. We elaborately design various simulation scenarios to challenge the applicability of local planners, including large-scale, partially unknown, and dynamic complex environments. Furthermore, three types of principled evaluation metrics are carefully designed to quantitatively evaluate the performance of local planners, wherein the safety, efficiency, and smoothness of motions are comprehensively considered. We present the application of the proposed benchmark in two popular open-source local planners to show the practicality of the benchmark. In addition, some insights and guidelines about the design and selection of local planners are also provided. The benchmark website contains all data of the designed simulation scenarios, detailed descriptions of these scenarios, and example code.
Range-only Collaborative Localization for Ground Vehicles
Dec 03, 2019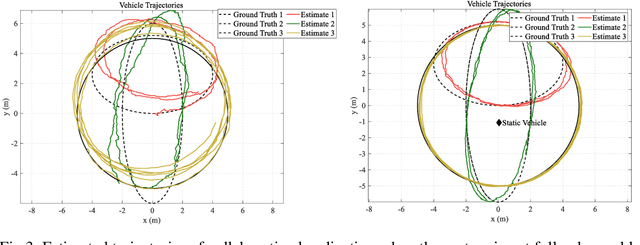
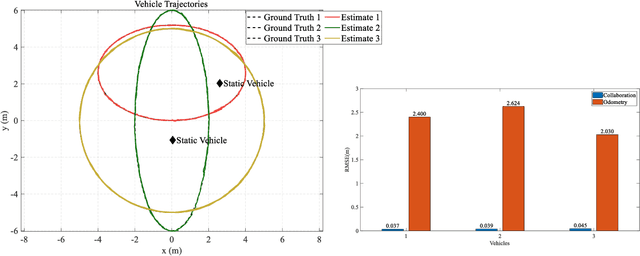
High-accuracy absolute localization for a team of vehicles is essential when accomplishing various kinds of tasks. As a promising approach, collaborative localization fuses the individual motion measurements and the inter-vehicle measurements to collaboratively estimate the states. In this paper, we focus on the range-only collaborative localization, which specifies the inter-vehicle measurements as inter-vehicle ranging measurements. We first investigate the observability properties of the system and derive that to achieve bounded localization errors, two vehicles are required to remain static like external infrastructures. Under the guide of the observability analysis, we then propose our range-only collaborative localization system which categorize the ground vehicles into two static vehicles and dynamic vehicles. The vehicles are connected utilizing a UWB network that is capable of both producing inter-vehicle ranging measurements and communication. Simulation results validate the observability analysis and demonstrate that collaborative localization is capable of achieving higher accuracy when utilizing the inter-vehicle measurements. Extensive experimental results are performed for a team of 3 and 5 vehicles. The real-world results illustrate that our proposed system enables accurate and real-time estimation of all vehicles' absolute poses.
CAE-RLSM: Consistent and Efficient Redundant Line Segment Merging for Online Feature Map Building
Jan 07, 2019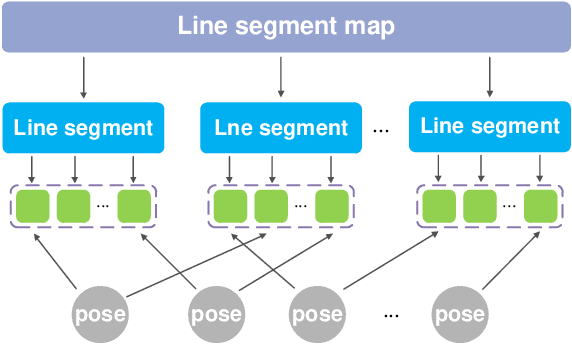
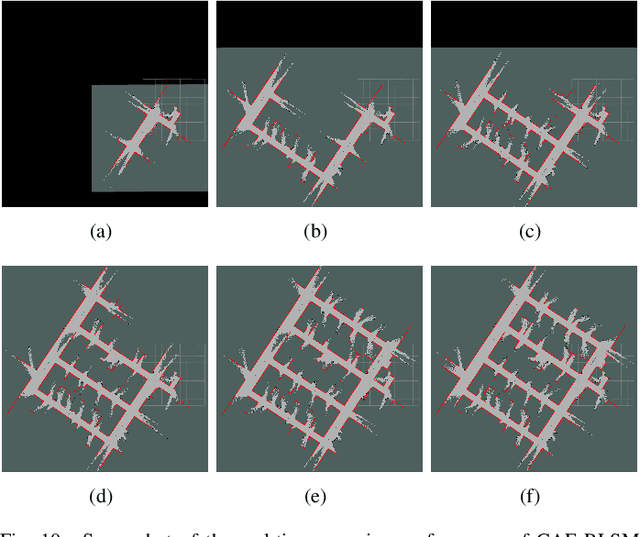
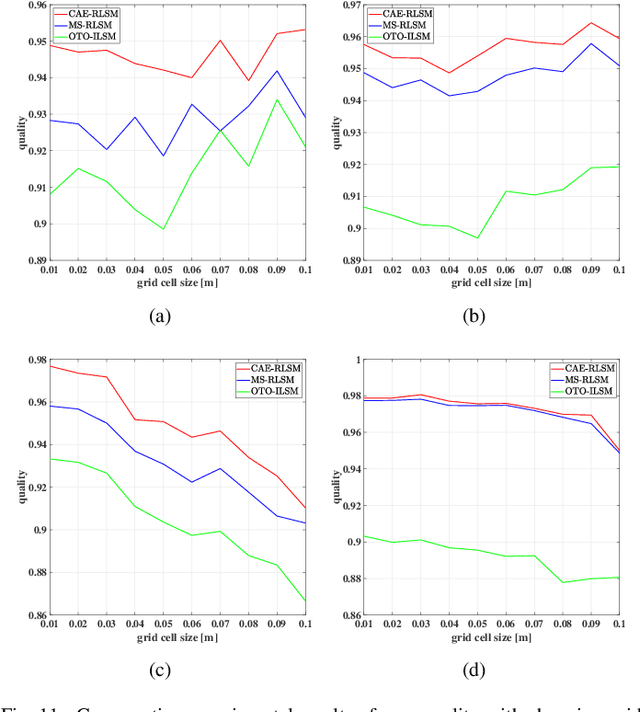
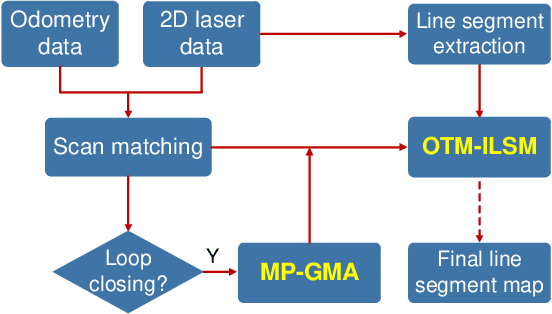
In order to obtain a compact line segment-based map representation for localization and planning of mobile robots, it is necessary to merge redundant line segments which physically represent the same part of the environment in different scans. In this paper, a consistent and efficient redundant line segment merging approach (CAE-RLSM) is proposed for online feature map building. The proposed CAE-RLSM is composed of two newly proposed modules: one-to-many incremental line segment merging (OTM-ILSM) and multi-processing global map adjustment (MP-GMA). Different from state-of-the-art offline merging approaches, the proposed CAE-RLSM can achieve real-time mapping performance, which not only reduces the redundancy of incremental merging with high efficiency, but also solves the problem of global map adjustment after loop closing to guarantee global consistency. Furthermore, a new correlation-based evaluation metric is proposed for the quality evaluation of line segment maps. This evaluation metric does not require manual measurement of the environmental metric information, instead it makes full use of globally consistent laser scans obtained by simultaneous localization and mapping (SLAM) systems to compare the performance of different line segment-based mapping approaches in an objective and fair manner. Comparative experimental results with respect to a mean shift-based offline redundant line segment merging approach (MS-RLSM) and an offline version of one-to-one incremental line segment merging approach (OTO-ILSM) on both public data sets and self-recorded data set are presented to show the superior performance of CAE-RLSM in terms of efficiency and map quality in different scenarios.