 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREBA: A Refinement-Based Architecture for Knowledge Representation and Reasoning in Robotics
Sep 21, 2018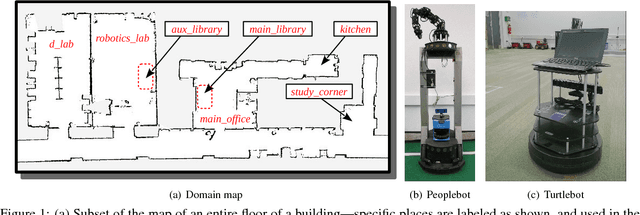
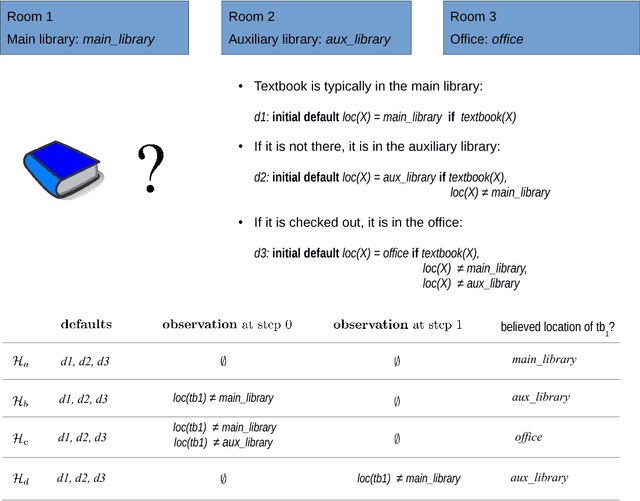
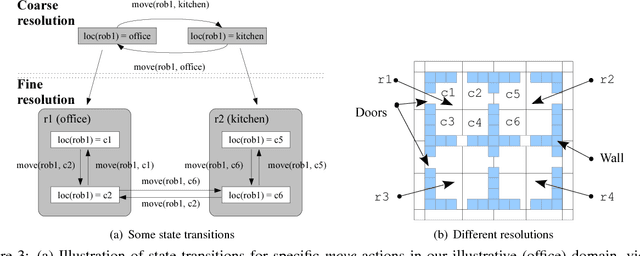
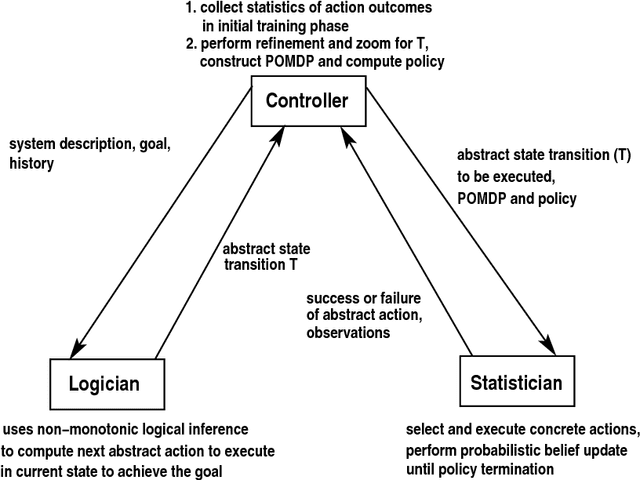
This paper describes an architecture for robots that combines the complementary strengths of probabilistic graphical models and declarative programming to represent and reason with logic-based and probabilistic descriptions of uncertainty and domain knowledge. An action language is extended to support non-boolean fluents and non-deterministic causal laws. This action language is used to describe tightly-coupled transition diagrams at two levels of granularity, with a fine-resolution transition diagram defined as a refinement of a coarse-resolution transition diagram of the domain. The coarse-resolution system description, and a history that includes (prioritized) defaults, are translated into an Answer Set Prolog (ASP) program. For any given goal, inference in the ASP program provides a plan of abstract actions. To implement each such abstract action, the robot automatically zooms to the part of the fine-resolution transition diagram relevant to this action. A probabilistic representation of the uncertainty in sensing and actuation is then included in this zoomed fine-resolution system description, and used to construct a partially observable Markov decision process (POMDP). The policy obtained by solving the POMDP is invoked repeatedly to implement the abstract action as a sequence of concrete actions, with the corresponding observations being recorded in the coarse-resolution history and used for subsequent reasoning. The architecture is evaluated in simulation and on a mobile robot moving objects in an indoor domain, to show that it supports reasoning with violation of defaults, noisy observations and unreliable actions, in complex domains.
Active vision for dexterous grasping of novel objects
Aug 14, 2017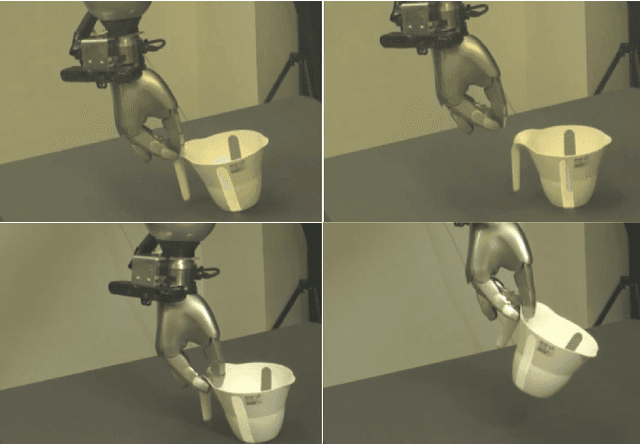
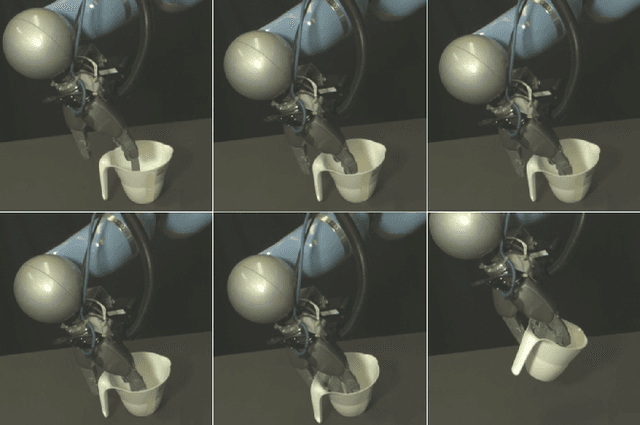
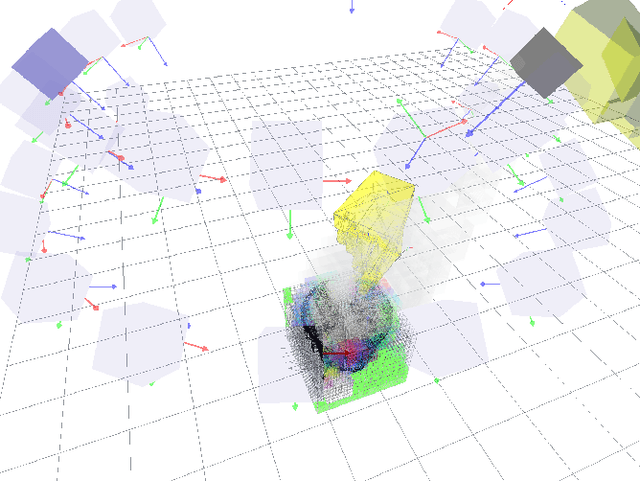
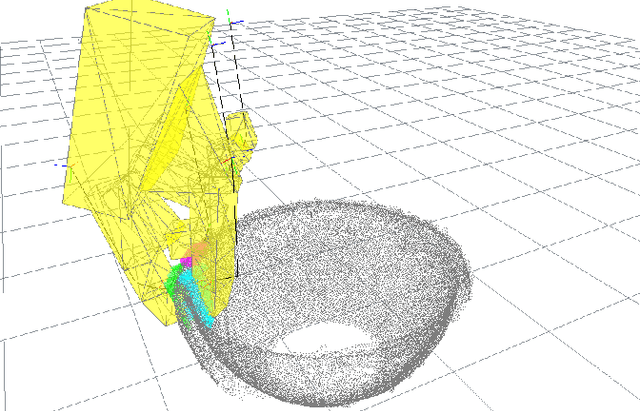
How should a robot direct active vision so as to ensure reliable grasping? We answer this question for the case of dexterous grasping of unfamiliar objects. By dexterous grasping we simply mean grasping by any hand with more than two fingers, such that the robot has some choice about where to place each finger. Such grasps typically fail in one of two ways, either unmodeled objects in the scene cause collisions or object reconstruction is insufficient to ensure that the grasp points provide a stable force closure. These problems can be solved more easily if active sensing is guided by the anticipated actions. Our approach has three stages. First, we take a single view and generate candidate grasps from the resulting partial object reconstruction. Second, we drive the active vision approach to maximise surface reconstruction quality around the planned contact points. During this phase, the anticipated grasp is continually refined. Third, we direct gaze to improve the safety of the planned reach to grasp trajectory. We show, on a dexterous manipulator with a camera on the wrist, that our approach (80.4% success rate) outperforms a randomised algorithm (64.3% success rate).
The STRANDS Project: Long-Term Autonomy in Everyday Environments
Oct 14, 2016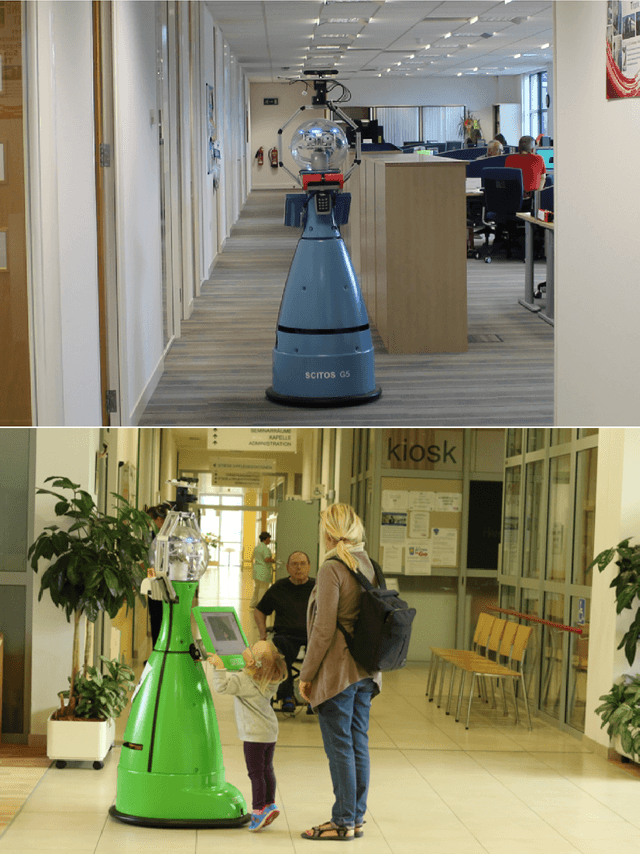
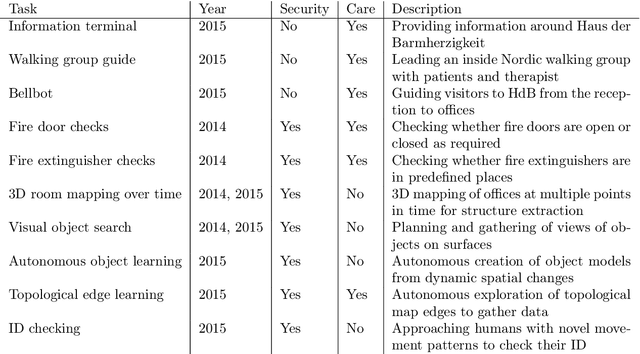
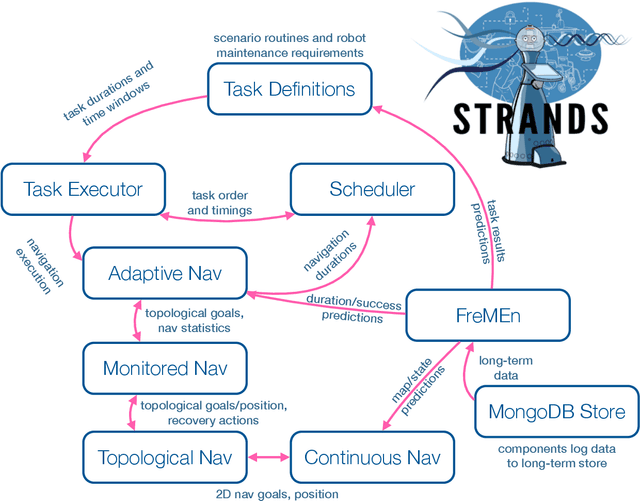
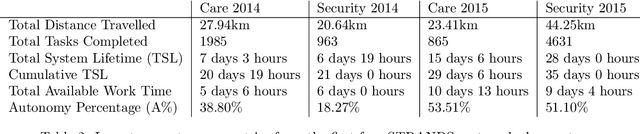
Thanks to the efforts of the robotics and autonomous systems community, robots are becoming ever more capable. There is also an increasing demand from end-users for autonomous service robots that can operate in real environments for extended periods. In the STRANDS project we are tackling this demand head-on by integrating state-of-the-art artificial intelligence and robotics research into mobile service robots, and deploying these systems for long-term installations in security and care environments. Over four deployments, our robots have been operational for a combined duration of 104 days autonomously performing end-user defined tasks, covering 116km in the process. In this article we describe the approach we have used to enable long-term autonomous operation in everyday environments, and how our robots are able to use their long run times to improve their own performance.
KR$^3$: An Architecture for Knowledge Representation and Reasoning in Robotics
May 05, 2014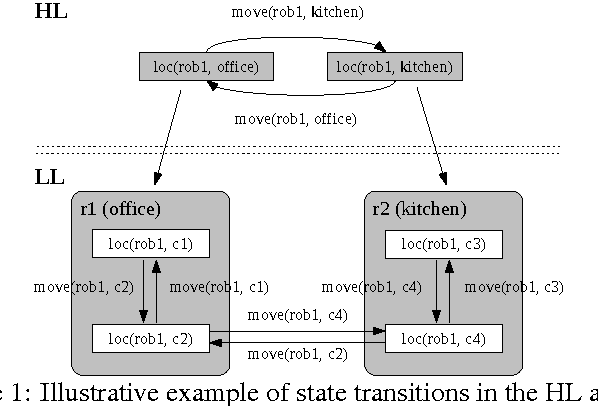
This paper describes an architecture that combines the complementary strengths of declarative programming and probabilistic graphical models to enable robots to represent, reason with, and learn from, qualitative and quantitative descriptions of uncertainty and knowledge. An action language is used for the low-level (LL) and high-level (HL) system descriptions in the architecture, and the definition of recorded histories in the HL is expanded to allow prioritized defaults. For any given goal, tentative plans created in the HL using default knowledge and commonsense reasoning are implemented in the LL using probabilistic algorithms, with the corresponding observations used to update the HL history. Tight coupling between the two levels enables automatic selection of relevant variables and generation of suitable action policies in the LL for each HL action, and supports reasoning with violation of defaults, noisy observations and unreliable actions in large and complex domains. The architecture is evaluated in simulation and on physical robots transporting objects in indoor domains; the benefit on robots is a reduction in task execution time of 39% compared with a purely probabilistic, but still hierarchical, approach.