 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUpdate-Free On-Policy Steering via Verifiers
Mar 10, 2026In recent years, Behavior Cloning (BC) has become one of the most prevalent methods for enabling robots to mimic human demonstrations. However, despite their successes, BC policies are often brittle and struggle with precise manipulation. To overcome these issues, we propose UF-OPS, an Update-Free On-Policy Steering method that enables the robot to predict the success likelihood of its actions and adapt its strategy at execution time. We accomplish this by training verifier functions using policy rollout data obtained during an initial evaluation of the policy. These verifiers are subsequently used to steer the base policy toward actions with a higher likelihood of success. Our method improves the performance of black-box diffusion policy, without changing the base parameters, making it light-weight and flexible. We present results from both simulation and real-world data and achieve an average 49% improvement in success rate over the base policy across 5 real tasks.
An Enhanced Graph Representation for Machine Learning Based Automatic Intersection Management
Jul 18, 2022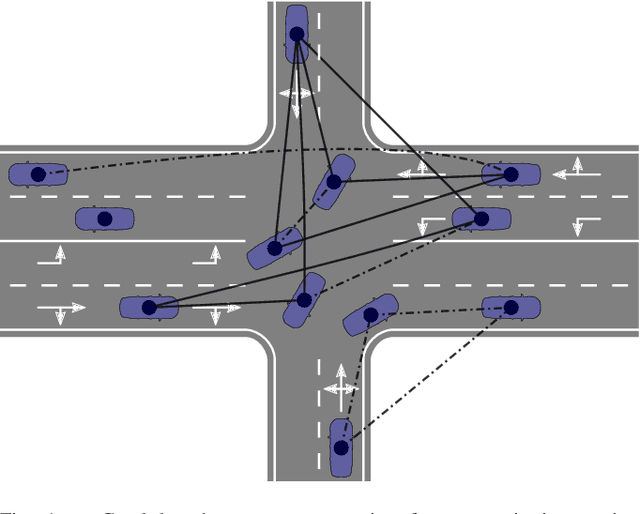
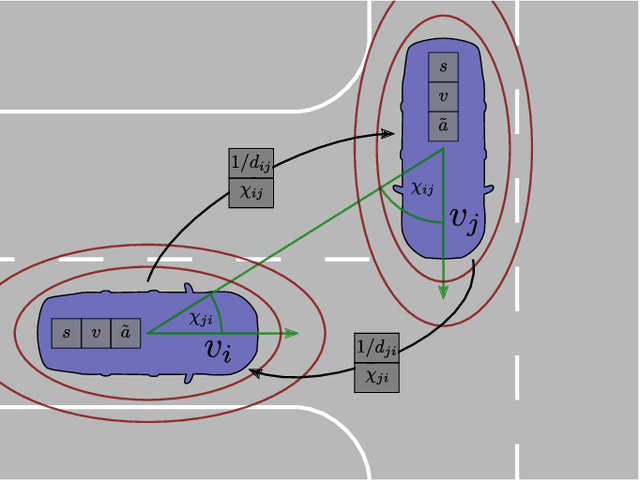
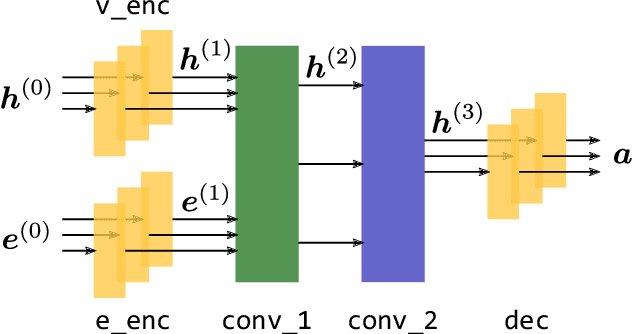
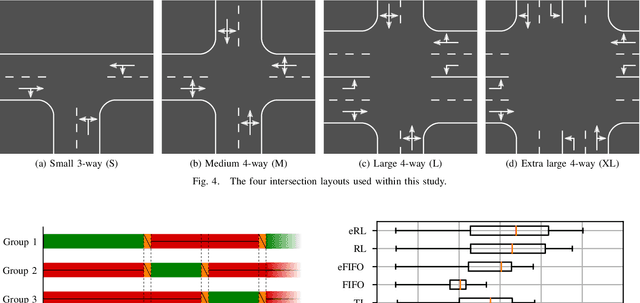
The improvement of traffic efficiency at urban intersections receives strong research interest in the field of automated intersection management. So far, mostly non-learning algorithms like reservation or optimization-based ones were proposed to solve the underlying multi-agent planning problem. At the same time, automated driving functions for a single ego vehicle are increasingly implemented using machine learning methods. In this work, we build upon a previously presented graph-based scene representation and graph neural network to approach the problem using reinforcement learning. The scene representation is improved in key aspects by using edge features in addition to the existing node features for the vehicles. This leads to an increased representation quality that is leveraged by an updated network architecture. The paper provides an in-depth evaluation of the proposed method against baselines that are commonly used in automatic intersection management. Compared to a traditional signalized intersection and an enhanced first-in-first-out scheme, a significant reduction of induced delay is observed at varying traffic densities. Finally, the generalization capability of the graph-based representation is evaluated by testing the policy on intersection layouts not seen during training. The model generalizes virtually without restrictions to smaller intersection layouts and within certain limits to larger ones.