 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisruption Detection for a Cognitive Digital Supply Chain Twin Using Hybrid Deep Learning
Sep 25, 2023



Purpose: Recent disruptive events, such as COVID-19 and Russia-Ukraine conflict, had a significant impact of global supply chains. Digital supply chain twins have been proposed in order to provide decision makers with an effective and efficient tool to mitigate disruption impact. Methods: This paper introduces a hybrid deep learning approach for disruption detection within a cognitive digital supply chain twin framework to enhance supply chain resilience. The proposed disruption detection module utilises a deep autoencoder neural network combined with a one-class support vector machine algorithm. In addition, long-short term memory neural network models are developed to identify the disrupted echelon and predict time-to-recovery from the disruption effect. Results: The obtained information from the proposed approach will help decision-makers and supply chain practitioners make appropriate decisions aiming at minimizing negative impact of disruptive events based on real-time disruption detection data. The results demonstrate the trade-off between disruption detection model sensitivity, encountered delay in disruption detection, and false alarms. This approach has seldom been used in recent literature addressing this issue.
Prediction of SLAM ATE Using an Ensemble Learning Regression Model and 1-D Global Pooling of Data Characterization
Mar 01, 2023



Robustness and resilience of simultaneous localization and mapping (SLAM) are critical requirements for modern autonomous robotic systems. One of the essential steps to achieve robustness and resilience is the ability of SLAM to have an integrity measure for its localization estimates, and thus, have internal fault tolerance mechanisms to deal with performance degradation. In this work, we introduce a novel method for predicting SLAM localization error based on the characterization of raw sensor inputs. The proposed method relies on using a random forest regression model trained on 1-D global pooled features that are generated from characterized raw sensor data. The model is validated by using it to predict the performance of ORB-SLAM3 on three different datasets running on four different operating modes, resulting in an average prediction accuracy of up to 94.7\%. The paper also studies the impact of 12 different 1-D global pooling functions on regression quality, and the superiority of 1-D global averaging is quantitatively proven. Finally, the paper studies the quality of prediction with limited training data, and proves that we are able to maintain proper prediction quality when only 20 \% of the training examples are used for training, which highlights how the proposed model can optimize the evaluation footprint of SLAM systems.
Optimizing SLAM Evaluation Footprint Through Dynamic Range Coverage Analysis of Datasets
Sep 13, 2022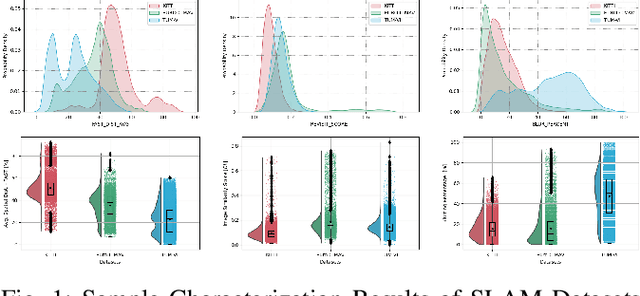
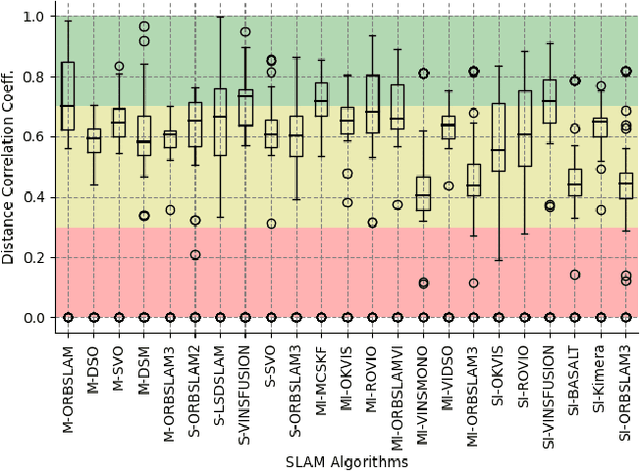
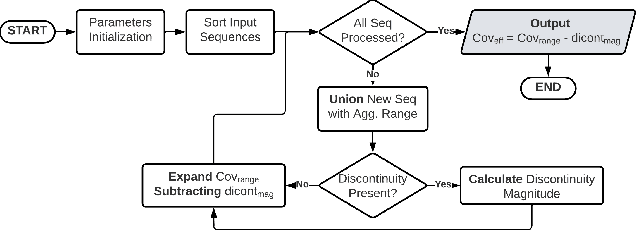
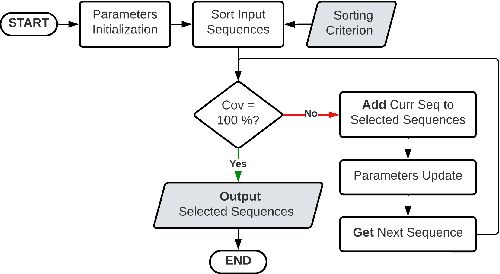
Simultaneous Localization and Mapping (SLAM) is considered an ever-evolving problem due to its usage in many applications. Evaluation of SLAM is done typically using publicly available datasets which are increasing in number and the level of difficulty. Each dataset provides a certain level of dynamic range coverage that is a key aspect of measuring the robustness and resilience of SLAM. In this paper, we provide a systematic analysis of the dynamic range coverage of datasets based on a number of characterization metrics, and our analysis shows a huge level of redundancy within and between datasets. Subsequently, we propose a dynamic programming (DP) algorithm for eliminating the redundancy in the evaluation process of SLAM by selecting a subset of sequences that matches a single or multiple dynamic range coverage objectives. It is shown that, with the help of dataset characterization and DP selection algorithm, a reduction in the evaluation effort can be achieved while maintaining the same level of coverage. Finally, we show that, in a multi-objective SLAM setup, the aggregation of multiple runs of the algorithm can achieve the same conclusions in localization accuracy by a SLAM algorithms.
Sparse Optical Flow-Based Line Feature Tracking
Apr 15, 2022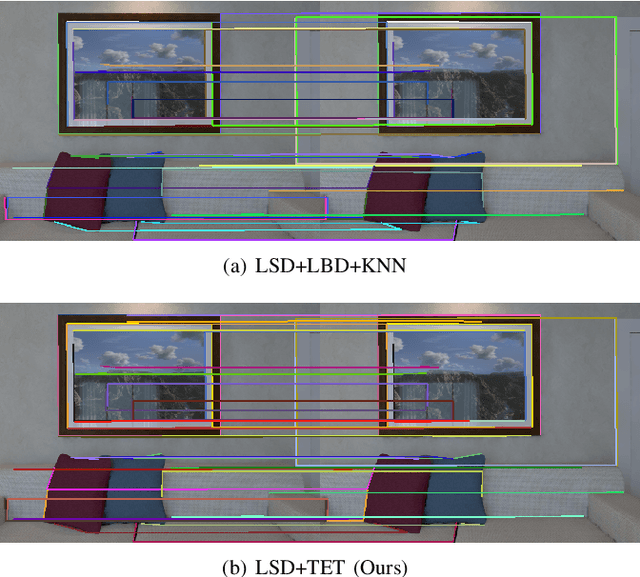
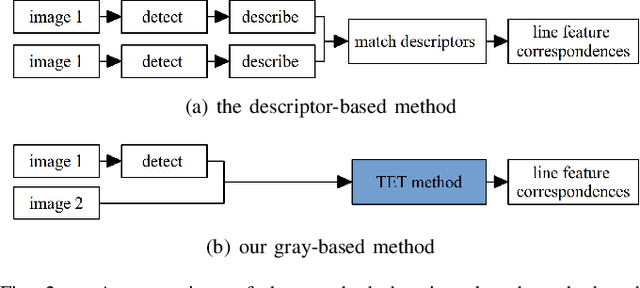
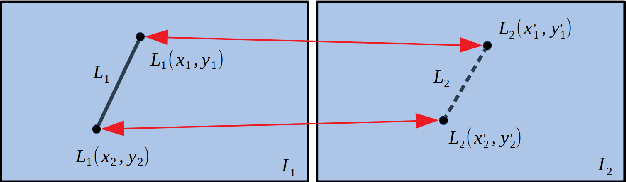
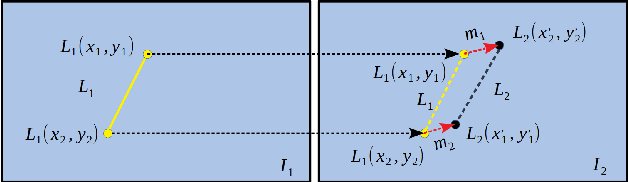
In this paper we propose a novel sparse optical flow (SOF)-based line feature tracking method for the camera pose estimation problem. This method is inspired by the point-based SOF algorithm and developed based on an observation that two adjacent images in time-varying image sequences satisfy brightness invariant. Based on this observation, we re-define the goal of line feature tracking: track two endpoints of a line feature instead of the entire line based on gray value matching instead of descriptor matching. To achieve this goal, an efficient two endpoint tracking (TET) method is presented: first, describe a given line feature with its two endpoints; next, track the two endpoints based on SOF to obtain two new tracked endpoints by minimizing a pixel-level grayscale residual function; finally, connect the two tracked endpoints to generate a new line feature. The correspondence is established between the given and the new line feature. Compared with current descriptor-based methods, our TET method needs not to compute descriptors and detect line features repeatedly. Naturally, it has an obvious advantage over computation. Experiments in several public benchmark datasets show our method yields highly competitive accuracy with an obvious advantage over speed.
Are We Ready for Robust and Resilient SLAM? A Framework For Quantitative Characterization of SLAM Datasets
Feb 23, 2022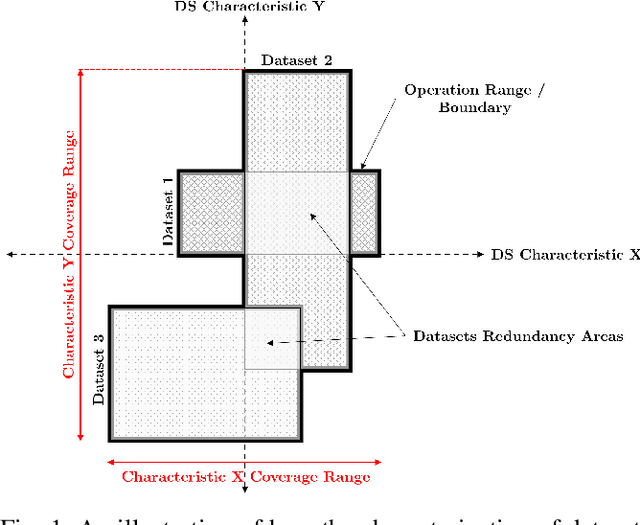
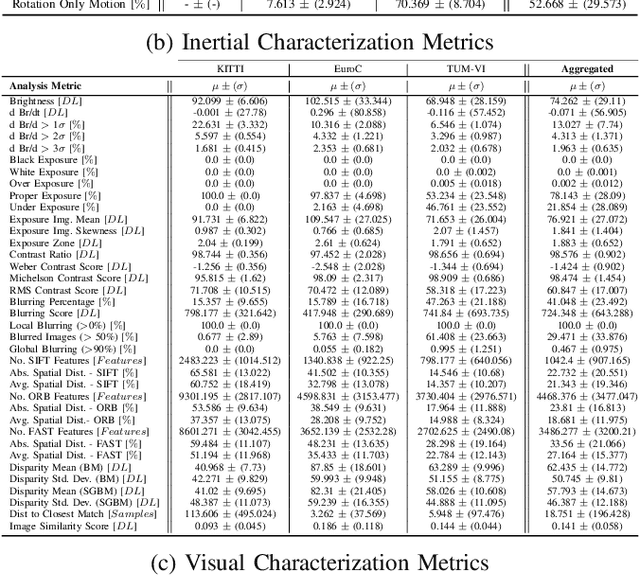
Reliability of SLAM systems is considered one of the critical requirements in many modern autonomous systems. This directed the efforts to developing many state-of-the-art systems, creating challenging datasets, and introducing rigorous metrics to measure SLAM system performance. However, the link between datasets and performance in the robustness/resilience context has rarely been explored. In order to fill this void, characterization the operating conditions of SLAM systems is essential in order to provide an environment for quantitative measurement of robustness and resilience. In this paper, we argue that for proper evaluation of SLAM performance, the characterization of SLAM datasets serves as a critical first step. The study starts by reviewing previous efforts for quantitative characterization of SLAM datasets. Then, the problem of perturbations characterization is discussed and the linkage to SLAM robustness/resilience is established. After that, we propose a novel, generic and extendable framework for quantitative analysis and comparison of SLAM datasets. Additionally, a description of different characterization parameters is provided. Finally, we demonstrate the application of our framework by presenting the characterization results of three SLAM datasets: KITTI, EuroC-MAV, and TUM-VI highlighting the level of insights achieved by the proposed framework.
Bearings Fault Detection Using Hidden Markov Models and Principal Component Analysis Enhanced Features
Apr 21, 2021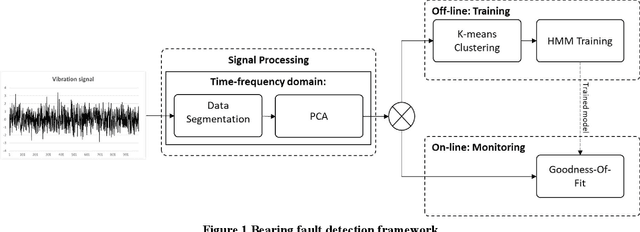
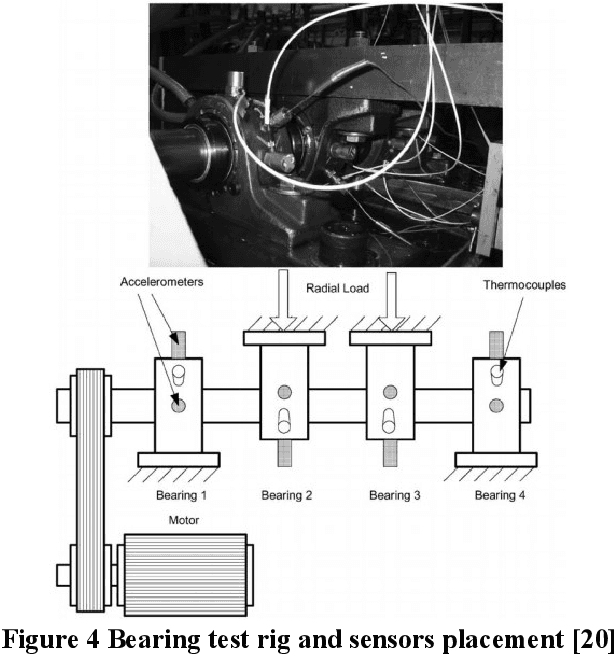
Asset health monitoring continues to be of increasing importance on productivity, reliability, and cost reduction. Early Fault detection is a keystone of health management as part of the emerging Prognostics and Health Management (PHM) philosophy. This paper proposes a Hidden Markov Model (HMM) to assess the machine health degradation. using Principal Component Analysis (PCA) to enhance features extracted from vibration signals is considered. The enhanced features capture the second order structure of the data. The experimental results based on a bearing test bed show the plausibility of the proposed method.
PL-VINS: Real-Time Monocular Visual-Inertial SLAM with Point and Line Features
Oct 11, 2020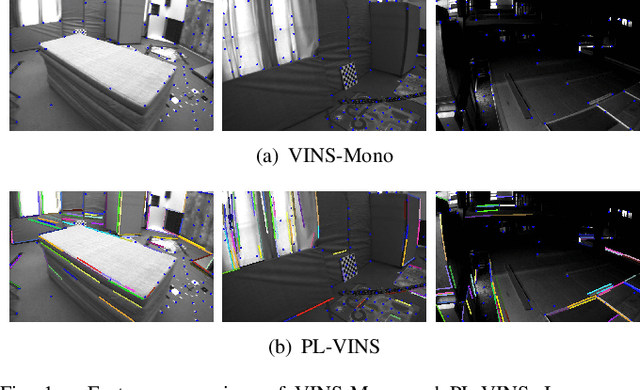
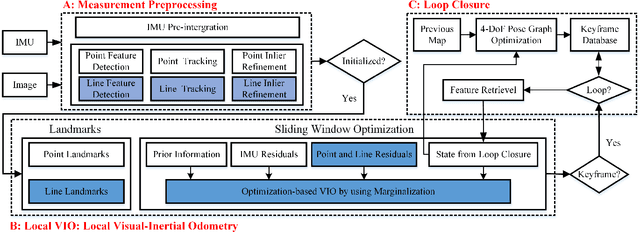
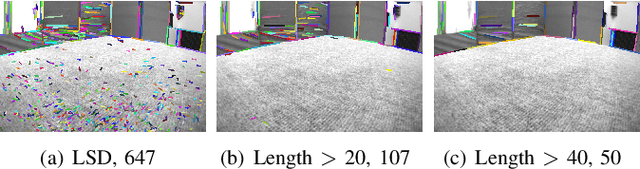
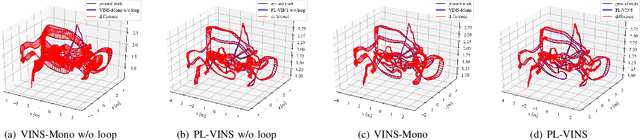
Leveraging line features to improve localization accuracy of point-based visual-inertial SLAM (VINS) is gaining interest as they provide additional constraints on scene structure. However, real-time performance when incorporating line features in VINS has not been addressed. This paper presents PL-VINS, a real-time optimization-based monocular VINS method with point and line features, developed based on the state-of-the-art point-based VINS-Mono \cite{vins}. We observe that current works use the LSD \cite{lsd} algorithm to extract line features; however, LSD is designed for scene shape representation instead of the pose estimation problem, which becomes the bottleneck for the real-time performance due to its high computational cost. In this paper, a modified LSD algorithm is presented by studying a hidden parameter tuning and length rejection strategy. The modified LSD can run at least three times as fast as LSD. Further, by representing space lines with the Pl\"{u}cker coordinates, the residual error in line estimation is modeled in terms of the point-to-line distance, which is then minimized by iteratively updating the minimum four-parameter orthonormal representation of the Pl\"{u}cker coordinates. Experiments in a public benchmark dataset show that the localization error of our method is 12-16\% less than that of VINS-Mono at the same pose update frequency. %For the benefit of the community, The source code of our method is available at: https://github.com/cnqiangfu/PL-VINS.