 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Diverse Natural Behaviors for Enhancing the Agility of Quadrupedal Robots
May 15, 2025Achieving animal-like agility is a longstanding goal in quadrupedal robotics. While recent studies have successfully demonstrated imitation of specific behaviors, enabling robots to replicate a broader range of natural behaviors in real-world environments remains an open challenge. Here we propose an integrated controller comprising a Basic Behavior Controller (BBC) and a Task-Specific Controller (TSC) which can effectively learn diverse natural quadrupedal behaviors in an enhanced simulator and efficiently transfer them to the real world. Specifically, the BBC is trained using a novel semi-supervised generative adversarial imitation learning algorithm to extract diverse behavioral styles from raw motion capture data of real dogs, enabling smooth behavior transitions by adjusting discrete and continuous latent variable inputs. The TSC, trained via privileged learning with depth images as input, coordinates the BBC to efficiently perform various tasks. Additionally, we employ evolutionary adversarial simulator identification to optimize the simulator, aligning it closely with reality. After training, the robot exhibits diverse natural behaviors, successfully completing the quadrupedal agility challenge at an average speed of 1.1 m/s and achieving a peak speed of 3.2 m/s during hurdling. This work represents a substantial step toward animal-like agility in quadrupedal robots, opening avenues for their deployment in increasingly complex real-world environments.
Learning to Navigate in a VUCA Environment: Hierarchical Multi-expert Approach
Nov 16, 2021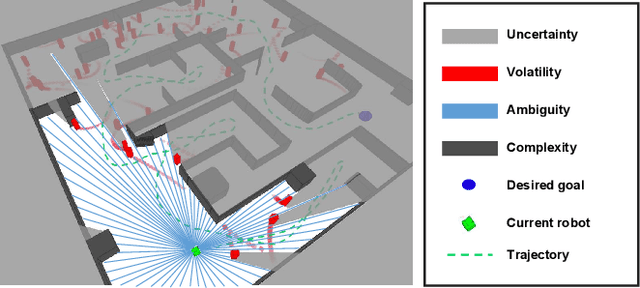
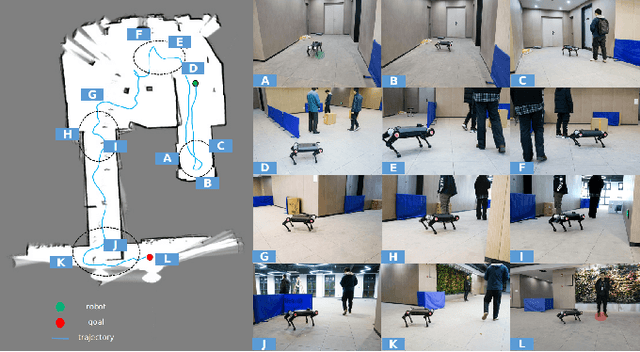
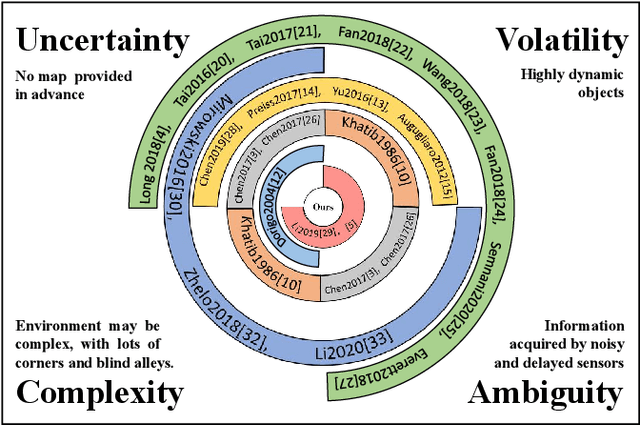
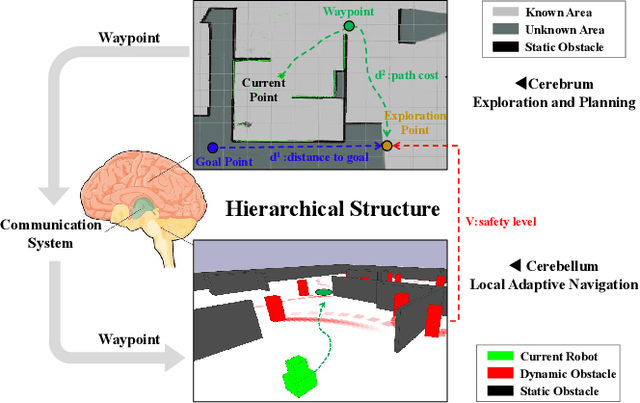
Despite decades of efforts, robot navigation in a real scenario with volatility, uncertainty, complexity, and ambiguity (VUCA for short), remains a challenging topic. Inspired by the central nervous system (CNS), we propose a hierarchical multi-expert learning framework for autonomous navigation in a VUCA environment. With a heuristic exploration mechanism considering target location, path cost, and safety level, the upper layer performs simultaneous map exploration and route-planning to avoid trapping in a blind alley, similar to the cerebrum in the CNS. Using a local adaptive model fusing multiple discrepant strategies, the lower layer pursuits a balance between collision-avoidance and go-straight strategies, acting as the cerebellum in the CNS. We conduct simulation and real-world experiments on multiple platforms, including legged and wheeled robots. Experimental results demonstrate our algorithm outperforms the existing methods in terms of task achievement, time efficiency, and security.