 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperiment-as-Code Labs: A Declarative Stack for AI-Driven Scientific Discovery
May 06, 2026To unleash the full potential of AI for Science, we must untether the agents from a purely digital environment. The agent's ability to control and explore in real-world labs is essential because the physical lab remains foundational to scientific discovery. While some tasks can be performed on a computer (e.g., data analysis, running simulated experiments), Eureka moments could occur at any time while operating lab instruments (e.g., when a scientist notices unexpected clues, intuition may prompt a real-time course change). Although autonomous labs are on the rise, which expose programmable APIs to control scientific instruments via software, bridging the gap between increasingly powerful AI agents and automated lab equipment requires innovation that draws insights from computer systems. We propose a new paradigm called ``Experiment-as-Code (EaC) Labs,'' where a core concept is to encode experiments as declarative configurations that can be compiled down to device-level APIs. AI agents come up with hypotheses and experiments, written as an ensemble of declarative configurations. The systems layer performs program analysis, safety checks, resource assignment, and job orchestration. Finally, programmatic experimentation occurs via actuating the device APIs. This is a general stack that is science-, lab-, and instrument-independent, representing a novel synthesis across the physical, systems, and intelligence layers to unleash the next breakthrough in AI for Science.
Risk-Controllable Multi-View Diffusion for Driving Scenario Generation
Mar 12, 2026Generating safety-critical driving scenarios is crucial for evaluating and improving autonomous driving systems, but long-tail risky situations are rarely observed in real-world data and difficult to specify through manual scenario design. Existing generative approaches typically treat risk as an after-the-fact label and struggle to maintain geometric consistency in multi-view driving scenes. We present RiskMV-DPO, a general and systematic pipeline for physically-informed, risk-controllable multi-view scenario generation. By integrating target risk levels with physically-grounded risk modeling, we autonomously synthesize diverse and high-stakes dynamic trajectories that serve as explicit geometric anchors for a diffusion-based video generator. To ensure spatial-temporal coherence and geometric fidelity, we introduce a geometry-appearance alignment module and a region-aware direct preference optimization (RA-DPO) strategy with motion-aware masking to focus learning on localized dynamic regions.Experiments on the nuScenes dataset show that RiskMV-DPO can freely generate a wide spectrum of diverse long-tail scenarios while maintaining state-of-the-art visual quality, improving 3D detection mAP from 18.17 to 30.50 and reducing FID to 15.70. Our work shifts the role of world models from passive environment prediction to proactive, risk-controllable synthesis, providing a scalable toolchain for the safety-oriented development of embodied intelligence.
DeepMath-Creative: A Benchmark for Evaluating Mathematical Creativity of Large Language Models
May 13, 2025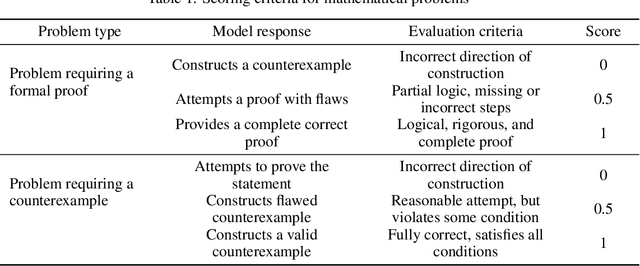
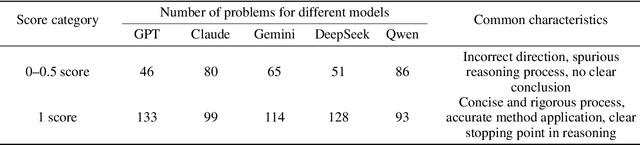
To advance the mathematical proficiency of large language models (LLMs), the DeepMath team has launched an open-source initiative aimed at developing an open mathematical LLM and systematically evaluating its mathematical creativity. This paper represents the initial contribution of this initiative. While recent developments in mathematical LLMs have predominantly emphasized reasoning skills, as evidenced by benchmarks on elementary to undergraduate-level mathematical tasks, the creative capabilities of these models have received comparatively little attention, and evaluation datasets remain scarce. To address this gap, we propose an evaluation criteria for mathematical creativity and introduce DeepMath-Creative, a novel, high-quality benchmark comprising constructive problems across algebra, geometry, analysis, and other domains. We conduct a systematic evaluation of mainstream LLMs' creative problem-solving abilities using this dataset. Experimental results show that even under lenient scoring criteria -- emphasizing core solution components and disregarding minor inaccuracies, such as small logical gaps, incomplete justifications, or redundant explanations -- the best-performing model, O3 Mini, achieves merely 70% accuracy, primarily on basic undergraduate-level constructive tasks. Performance declines sharply on more complex problems, with models failing to provide substantive strategies for open problems. These findings suggest that, although current LLMs display a degree of constructive proficiency on familiar and lower-difficulty problems, such performance is likely attributable to the recombination of memorized patterns rather than authentic creative insight or novel synthesis.
Differentiable Chemical Physics by Geometric Deep Learning for Gradient-based Property Optimization of Mixtures
Oct 03, 2023



Chemical mixtures, satisfying multi-objective performance metrics and constraints, enable their use in chemical processes and electrochemical devices. In this work, we develop a differentiable chemical-physics framework for modeling chemical mixtures, DiffMix, where geometric deep learning (GDL) is leveraged to map from molecular species, compositions and environment conditions, to physical coefficients in the mixture physics laws. In particular, we extend mixture thermodynamic and transport laws by creating learnable physical coefficients, where we use graph neural networks as the molecule encoder and enforce component-wise permutation-invariance. We start our model evaluations with thermodynamics of binary mixtures, and further benchmarked multicomponent electrolyte mixtures on their transport properties, in order to test the model generalizability. We show improved prediction accuracy and model robustness of DiffMix than its purely data-driven variants. Furthermore, we demonstrate the efficient optimization of electrolyte transport properties, built on the gradient obtained using DiffMix auto-differentiation. Our simulation runs are then backed up by the data generated by a robotic experimentation setup, Clio. By combining mixture physics and GDL, DiffMix expands the predictive modeling methods for chemical mixtures and provides low-cost optimization approaches in large chemical spaces.
Autonomous optimization of nonaqueous battery electrolytes via robotic experimentation and machine learning
Nov 23, 2021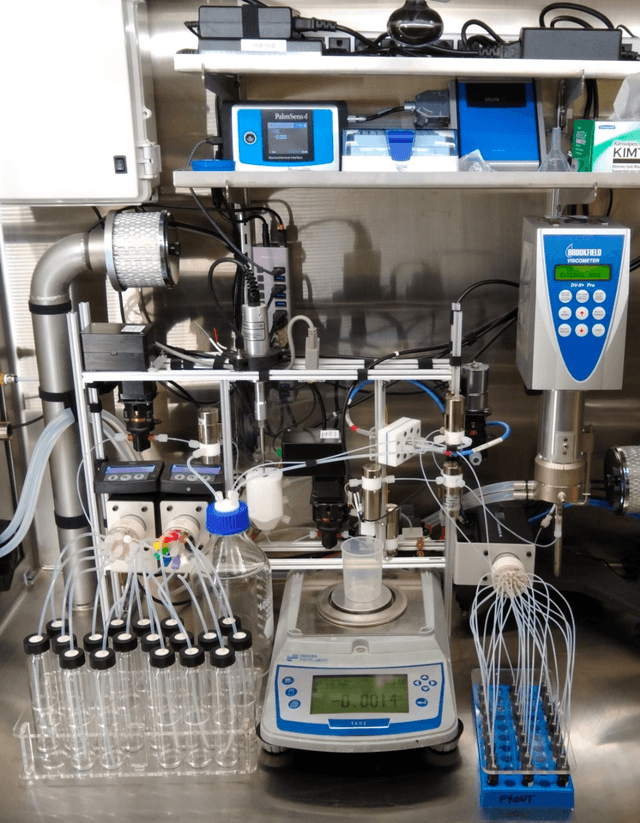
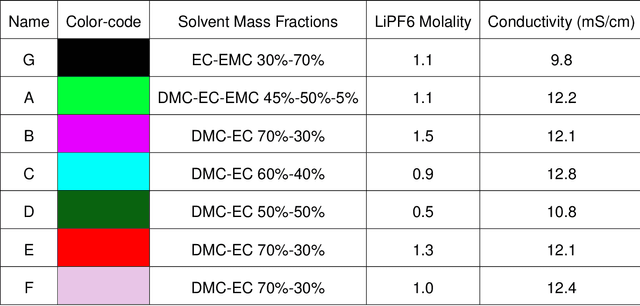
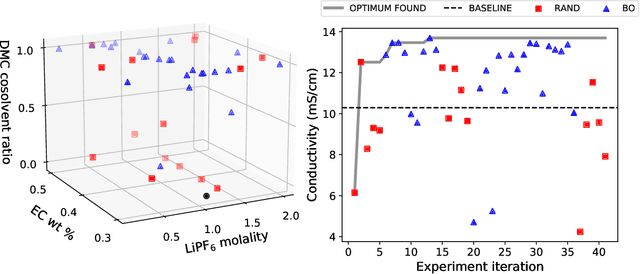
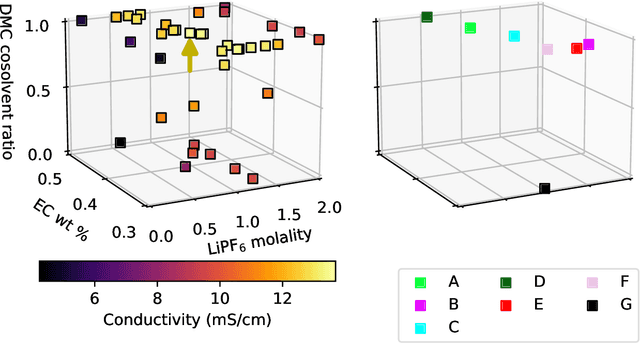
In this work, we introduce a novel workflow that couples robotics to machine-learning for efficient optimization of a non-aqueous battery electrolyte. A custom-built automated experiment named "Clio" is coupled to Dragonfly - a Bayesian optimization-based experiment planner. Clio autonomously optimizes electrolyte conductivity over a single-salt, ternary solvent design space. Using this workflow, we identify 6 fast-charging electrolytes in 2 work-days and 42 experiments (compared with 60 days using exhaustive search of the 1000 possible candidates, or 6 days assuming only 10% of candidates are evaluated). Our method finds the highest reported conductivity electrolyte in a design space heavily explored by previous literature, converging on a high-conductivity mixture that demonstrates subtle electrolyte chemical physics.