 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Decision Making for Scalable Multi-Agent Navigation: Integrating Semantic Maps, Discrete Coordination, and Model Predictive Control
Oct 16, 2024This paper presents a framework for multi-agent navigation in structured but dynamic environments, integrating three key components: a shared semantic map encoding metric and semantic environmental knowledge, a claim policy for coordinating access to areas within the environment, and a Model Predictive Controller for generating motion trajectories that respect environmental and coordination constraints. The main advantages of this approach include: (i) enforcing area occupancy constraints derived from specific task requirements; (ii) enhancing computational scalability by eliminating the need for collision avoidance constraints between robotic agents; and (iii) the ability to anticipate and avoid deadlocks between agents. The paper includes both simulations and physical experiments demonstrating the framework's effectiveness in various representative scenarios.
Efficient Constrained Dynamics Algorithms based on an Equivalent LQR Formulation using Gauss' Principle of Least Constraint
Oct 01, 2023



We derive a family of efficient constrained dynamics algorithms by formulating an equivalent linear quadratic regulator (LQR) problem using Gauss principle of least constraint and solving it using dynamic programming. Our approach builds upon the pioneering (but largely unknown) O(n + m^2d + m^3) solver by Popov and Vereshchagin (PV), where n, m and d are the number of joints, number of constraints and the kinematic tree depth respectively. We provide an expository derivation for the original PV solver and extend it to floating-base kinematic trees with constraints allowed on any link. We make new connections between the LQR's dual Hessian and the inverse operational space inertia matrix (OSIM), permitting efficient OSIM computation, which we further accelerate using matrix inversion lemma. By generalizing the elimination ordering and accounting for MUJOCO-type soft constraints, we derive two original O(n + m) complexity solvers. Our numerical results indicate that significant simulation speed-up can be achieved for high dimensional robots like quadrupeds and humanoids using our algorithms as they scale better than the widely used O(nd^2 + m^2d + d^2m) LTL algorithm of Featherstone. The derivation through the LQR-constrained dynamics connection can make our algorithm accessible to a wider audience and enable cross-fertilization of software and research results between the fields
Autonomous Ground Navigation in Highly Constrained Spaces: Lessons learned from The 2nd BARN Challenge at ICRA 2023
Aug 06, 2023The 2nd BARN (Benchmark Autonomous Robot Navigation) Challenge took place at the 2023 IEEE International Conference on Robotics and Automation (ICRA 2023) in London, UK and continued to evaluate the performance of state-of-the-art autonomous ground navigation systems in highly constrained environments. Compared to The 1st BARN Challenge at ICRA 2022 in Philadelphia, the competition has grown significantly in size, doubling the numbers of participants in both the simulation qualifier and physical finals: Ten teams from all over the world participated in the qualifying simulation competition, six of which were invited to compete with each other in three physical obstacle courses at the conference center in London, and three teams won the challenge by navigating a Clearpath Jackal robot from a predefined start to a goal with the shortest amount of time without colliding with any obstacle. The competition results, compared to last year, suggest that the teams are making progress toward more robust and efficient ground navigation systems that work out-of-the-box in many obstacle environments. However, a significant amount of fine-tuning is still needed onsite to cater to different difficult navigation scenarios. Furthermore, challenges still remain for many teams when facing extremely cluttered obstacles and increasing navigation speed. In this article, we discuss the challenge, the approaches used by the three winning teams, and lessons learned to direct future research.
Energy-Efficient Control of Cable Robots Exploiting Natural Dynamics and Task Knowledge
Mar 17, 2023This paper focusses on the energy-efficient control of a cable-driven robot for tasks that only require precise positioning at few points in their motion, and where that accuracy can be obtained through contacts. This includes the majority of pick-and-place operations. Knowledge about the task is directly taken into account when specifying the control execution. The natural dynamics of the system can be exploited when there is a tolerance on the position of the trajectory. Brakes are actively used to replace standstill torques, and as passive actuation. This is executed with a hybrid discrete-continuous controller. A discrete controller is used to specify and coordinate between subtasks, and based on the requirements of these specific subtasks, specific, robust, continuous controllers are constructed. This approach allows for less stiff and thus saver, and cheaper hardware to be used. For a planar pick-and-place operation, it was found that this results in energy savings of more than 30%. However, when the payload moves with the natural dynamics, there is less control of the followed trajectory and its timing compared to a traditional trajectory-based execution. Also, the presented approach implies a fundamentally different way to specify and execute tasks.
Towards a Domain Specific Language for a Scene Graph based Robotic World Model
Aug 01, 2014Robot world model representations are a vital part of robotic applications. However, there is no support for such representations in model-driven engineering tool chains. This work proposes a novel Domain Specific Language (DSL) for robotic world models that are based on the Robot Scene Graph (RSG) approach. The RSG-DSL can express (a) application specific scene configurations, (b) semantic scene structures and (c) inputs and outputs for the computational entities that are loaded into an instance of a world model.
A Rigorously Bayesian Beam Model and an Adaptive Full Scan Model for Range Finders in Dynamic Environments
Jan 15, 2014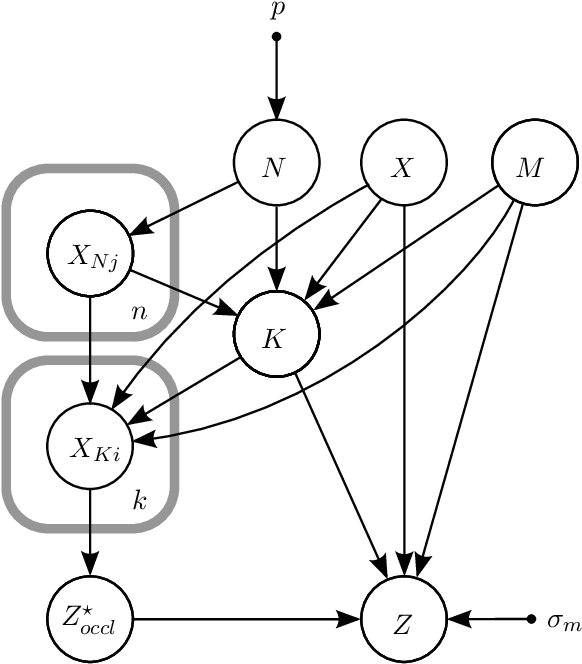
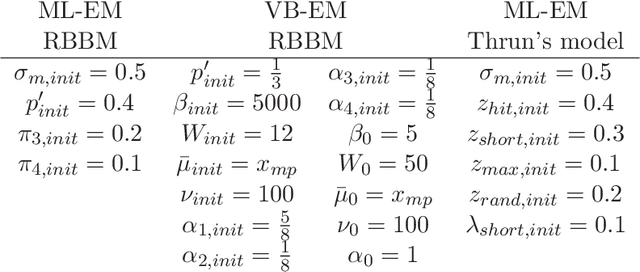
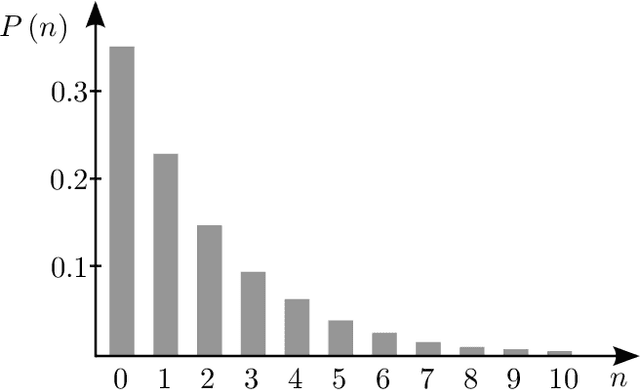

This paper proposes and experimentally validates a Bayesian network model of a range finder adapted to dynamic environments. All modeling assumptions are rigorously explained, and all model parameters have a physical interpretation. This approach results in a transparent and intuitive model. With respect to the state of the art beam model this paper: (i) proposes a different functional form for the probability of range measurements caused by unmodeled objects, (ii) intuitively explains the discontinuity encountered in te state of the art beam model, and (iii) reduces the number of model parameters, while maintaining the same representational power for experimental data. The proposed beam model is called RBBM, short for Rigorously Bayesian Beam Model. A maximum likelihood and a variational Bayesian estimator (both based on expectation-maximization) are proposed to learn the model parameters. Furthermore, the RBBM is extended to a full scan model in two steps: first, to a full scan model for static environments and next, to a full scan model for general, dynamic environments. The full scan model accounts for the dependency between beams and adapts to the local sample density when using a particle filter. In contrast to Gaussian-based state of the art models, the proposed full scan model uses a sample-based approximation. This sample-based approximation enables handling dynamic environments and capturing multi-modality, which occurs even in simple static environments.
Domain Specific Language for Geometric Relations between Rigid Bodies targeted to robotic applications
Apr 10, 2013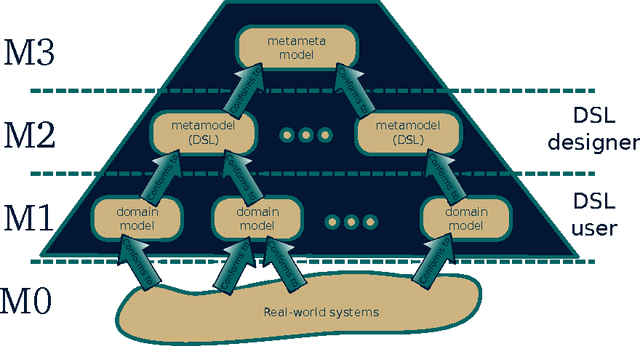
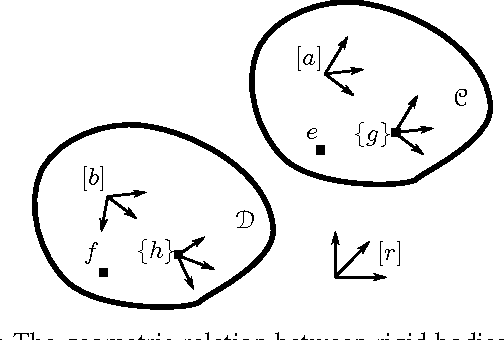
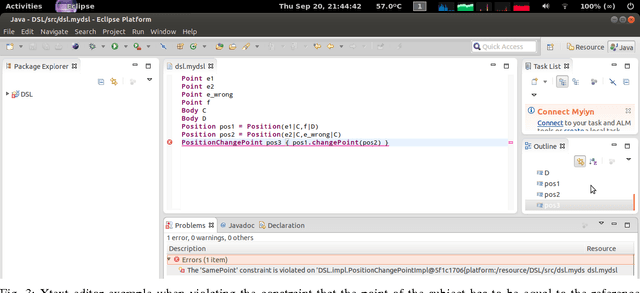

This paper presents a DSL for geometric relations between rigid bodies such as relative position, orientation, pose, linear velocity, angular velocity, and twist. The DSL is the formal model of the recently proposed semantics for the standardization of geometric relations between rigid bodies, referred to as `geometric semantics'. This semantics explicitly states the coordinate-invariant properties and operations, and, more importantly, all the choices that are made in coordinate representations of these geometric relations. This results in a set of concrete suggestions for standardizing terminology and notation, allowing programmers to write fully unambiguous software interfaces, including automatic checks for semantic correctness of all geometric operations on rigid-body coordinate representations. The DSL is implemented in two different ways: an external DSL in Xcore and an internal DSL in Prolog. Besides defining a grammar and operations, the DSL also implements constraints. In the Xcore model, the Object Constraint Language language is used, while in the Prolog model, the constraint are natively modelled in Prolog. This paper discusses the implemented DSL and the tools developed on top of this DSL. In particular an editor, checking the semantic constraints and providing semantic meaningful errors during editing is proposed.
Pure Coordination using the Coordinator--Configurator Pattern
Mar 01, 2013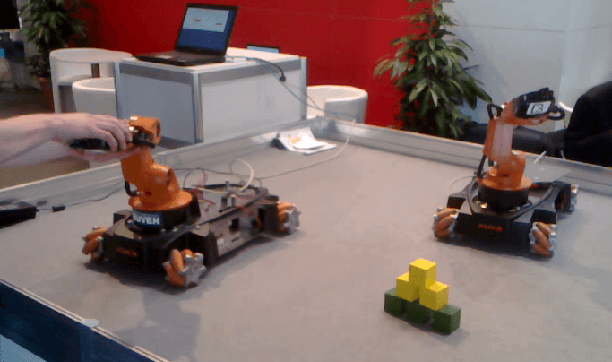
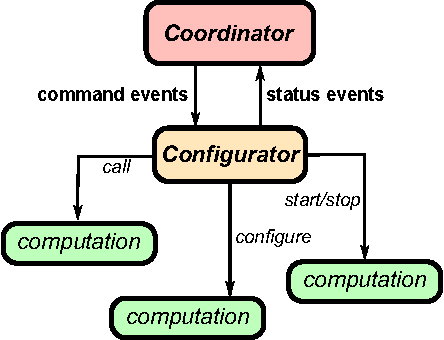
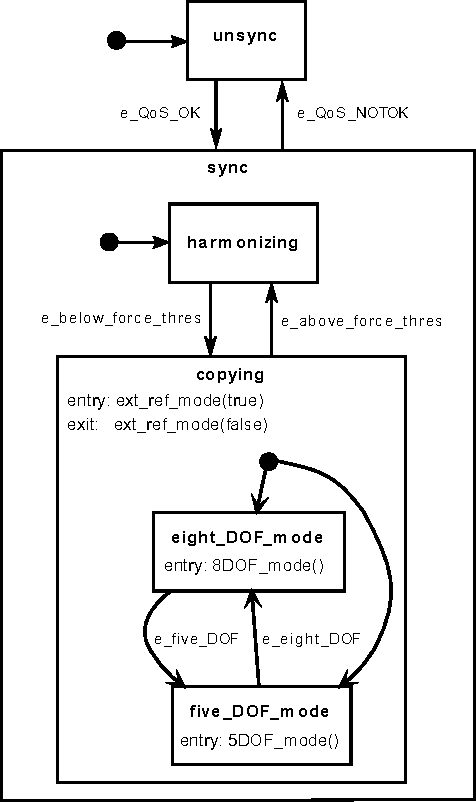
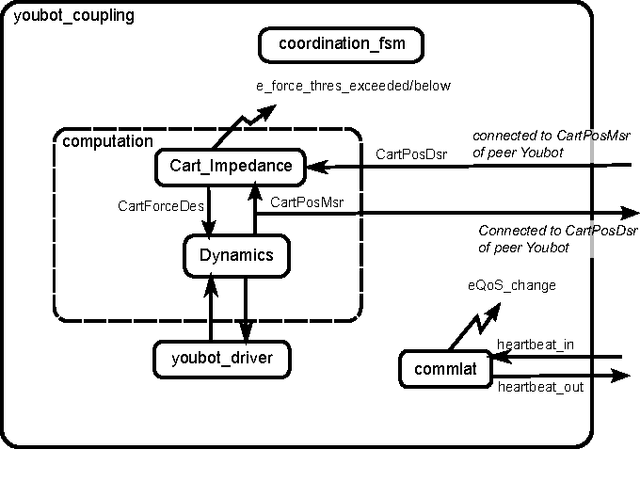
This work-in-progress paper reports on our efforts to improve different aspects of coordination in complex, component-based robotic systems. Coordination is a system level aspect concerned with commanding, configuring and monitoring functional computations such that the system as a whole behaves as desired. To that end a variety of models such as Petri-nets or Finite State Machines may be utilized. These models specify actions to be executed, such as invoking operations or configuring components to achieve a certain goal. This traditional approach has several disadvantages related to loss of reusability of coordination models due to coupling with platform-specific functionality, non-deterministic temporal behavior and limited robustness as a result of executing platform operations within the context of the coordinator. To avoid these shortcomings, we propose to split this "rich" coordinator into a Pure Coordinator and a Configurator. Although the coordinator remains in charge of commanding and reacting, the execution of actions is deferred to the Configurator. This pattern, called "Coordinator-Configurator", is implemented as a novel Configurator domain specific language that can be used together with any model of coordination. We illustrate the approach by refactoring an existing application that realizes a safe haptic coupling of two youBot mobile manipulators.