 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeomstats: A Python Package for Riemannian Geometry in Machine Learning
Apr 07, 2020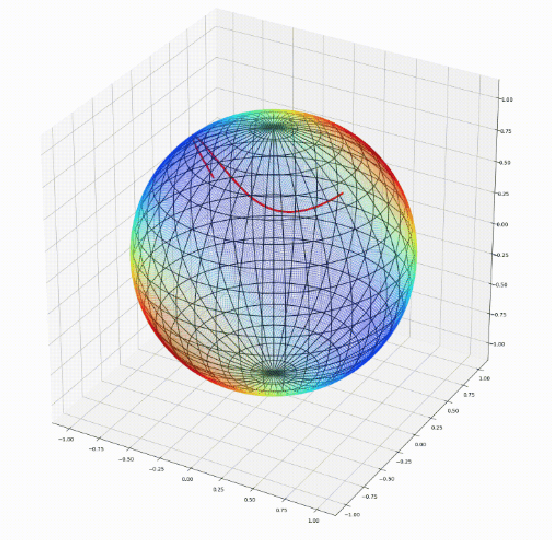
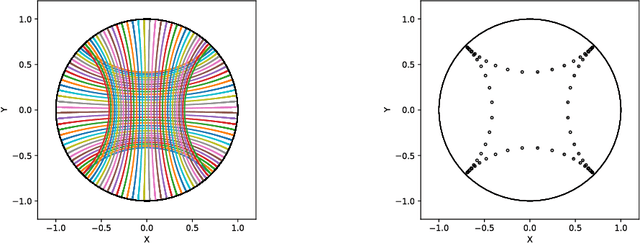
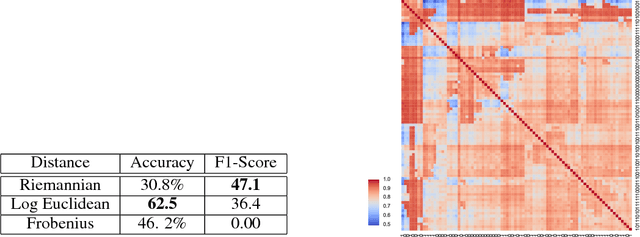
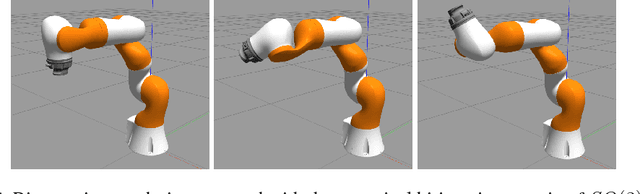
We introduce Geomstats, an open-source Python toolbox for computations and statistics on nonlinear manifolds, such as hyperbolic spaces, spaces of symmetric positive definite matrices, Lie groups of transformations, and many more. We provide object-oriented and extensively unit-tested implementations. Among others, manifolds come equipped with families of Riemannian metrics, with associated exponential and logarithmic maps, geodesics and parallel transport. Statistics and learning algorithms provide methods for estimation, clustering and dimension reduction on manifolds. All associated operations are vectorized for batch computation and provide support for different execution backends, namely NumPy, PyTorch and TensorFlow, enabling GPU acceleration. This paper presents the package, compares it with related libraries and provides relevant code examples. We show that Geomstats provides reliable building blocks to foster research in differential geometry and statistics, and to democratize the use of Riemannian geometry in machine learning applications. The source code is freely available under the MIT license at \url{geomstats.ai}.
FRSign: A Large-Scale Traffic Light Dataset for Autonomous Trains
Feb 05, 2020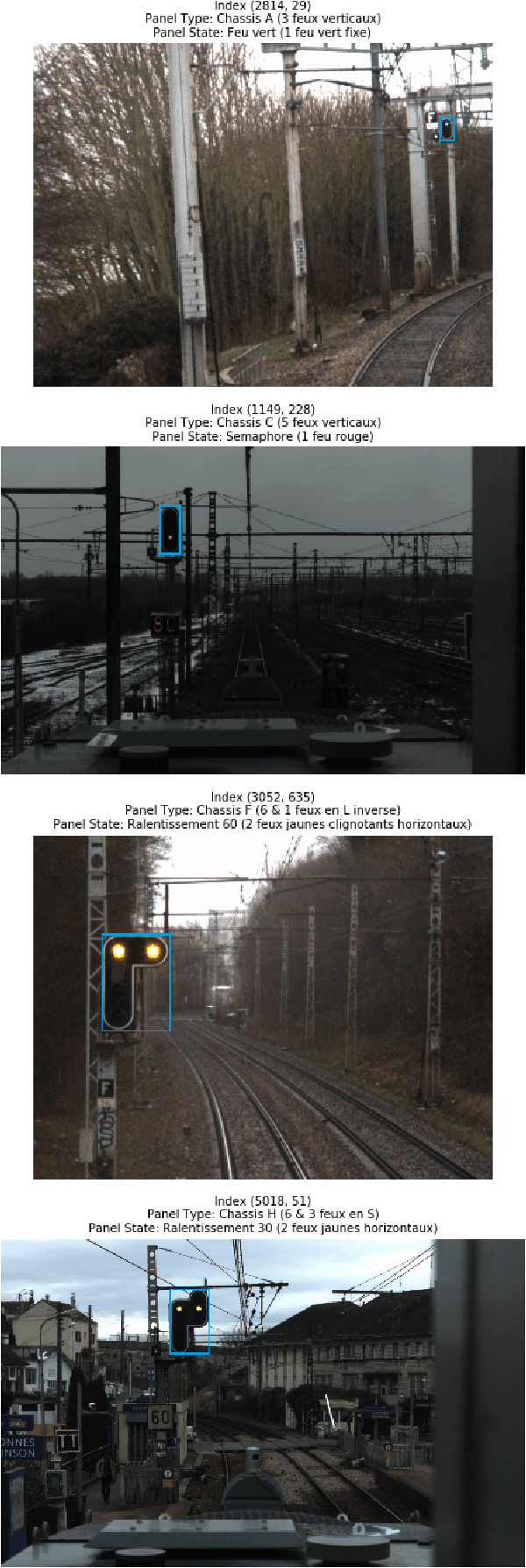
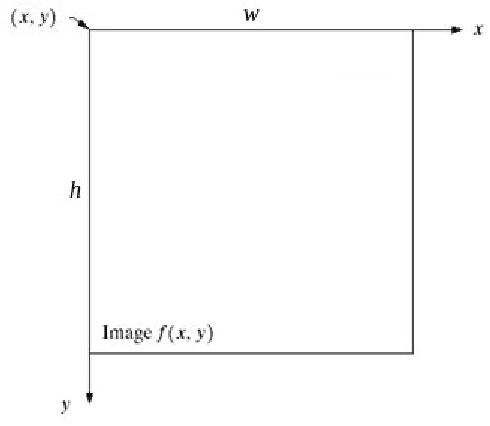
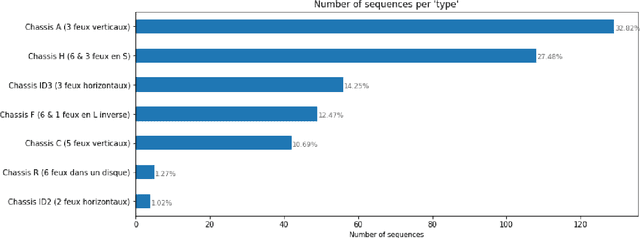
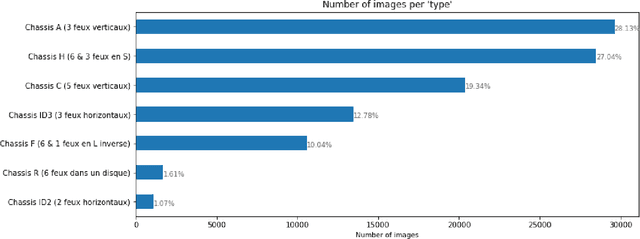
In the realm of autonomous transportation, there have been many initiatives for open-sourcing self-driving cars datasets, but much less for alternative methods of transportation such as trains. In this paper, we aim to bridge the gap by introducing FRSign, a large-scale and accurate dataset for vision-based railway traffic light detection and recognition. Our recordings were made on selected running trains in France and benefited from carefully hand-labeled annotations. An illustrative dataset which corresponds to ten percent of the acquired data to date is published in open source with the paper. It contains more than 100,000 images illustrating six types of French railway traffic lights and their possible color combinations, together with the relevant information regarding their acquisition such as date, time, sensor parameters, and bounding boxes. This dataset is published in open-source at the address \url{https://frsign.irt-systemx.fr}. We compare, analyze various properties of the dataset and provide metrics to express its variability. We also discuss specific challenges and particularities related to autonomous trains in comparison to autonomous cars.
Learning graph-structured data using Poincaré embeddings and Riemannian K-means algorithms
Jul 02, 2019
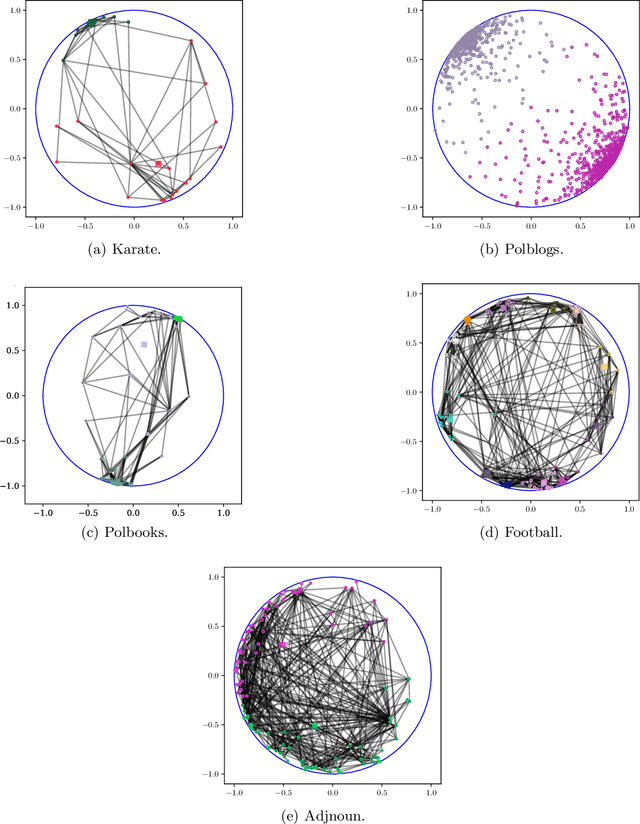
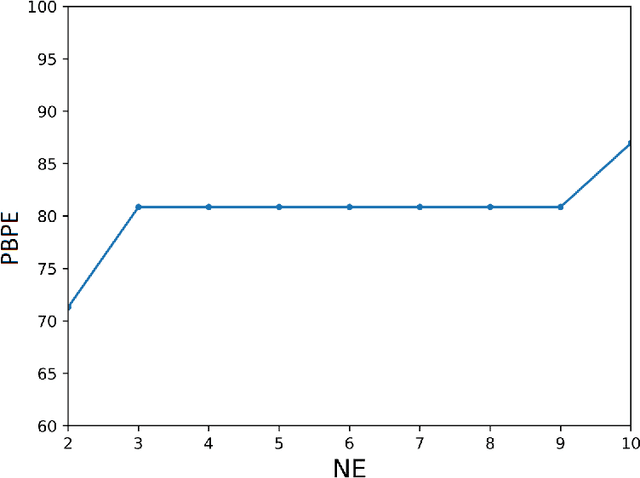
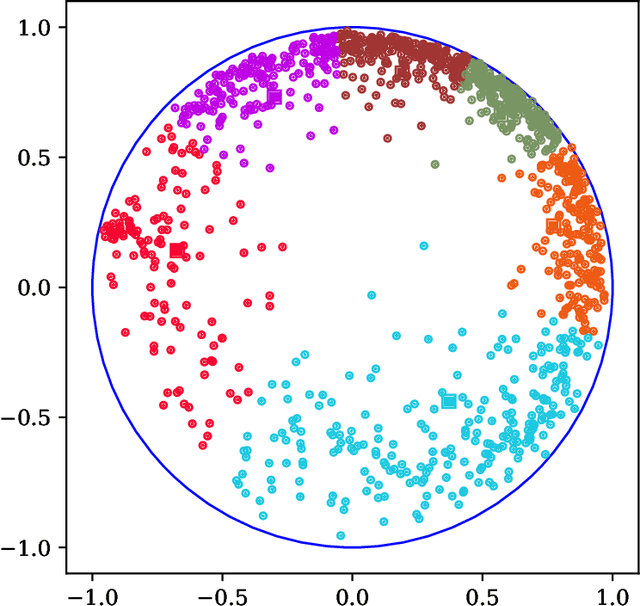
Recent literature has shown several benefits of hyperbolic embedding of graph-structured data (GSD) in representing their structures and latent relations. While several studies have explored the ability of hyperbolic embedding to represent data (for example, by quantifying their mean average precision) and their ability to produce better visualisations of clusters, only few works exploited the effectiveness of hyperbolic embedding to perform learning on the initial GSD. Motivated by innovative ideas from the fields of Brain computer interfaces and Radar processing, this paper presents a new scheme for learning GSD based on hyperbolic embedding, Riemannian barycentre (i.e. Fr\'echet or geometric mean) and $K$-means algorithms as a significant tool that derives from it. The main idea is as follows. Relying on the Riemannian barycentre, we define a notion of minimal variance which allows us to choose an embedding between different ones. This embedding is used thereafter together with $K$-means algorithms to perform unsupervised clustering and in combination with the nearest neighbour rule to perform supervised learning. We demonstrate the performance of the proposed framework through several experiments on real-world social networks and hierarchical GSD. The obtained results outperform their counterparts in high-dimensional Euclidean spaces and recent proposed geometric approaches.
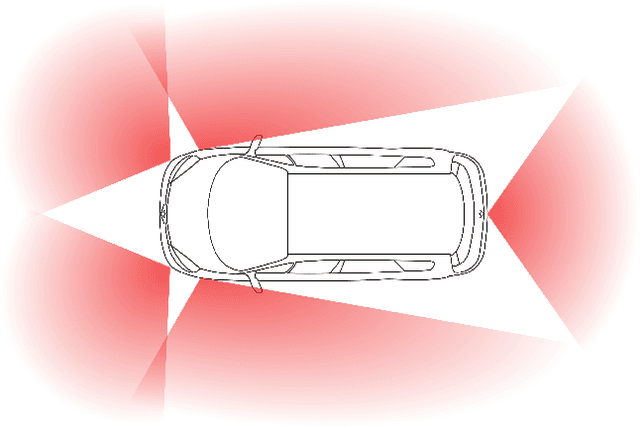
Real Time Lidar and Radar High-Level Fusion for Obstacle Detection and Tracking with evaluation on a ground truth
Jul 30, 2018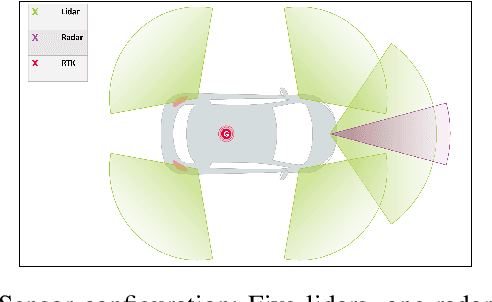
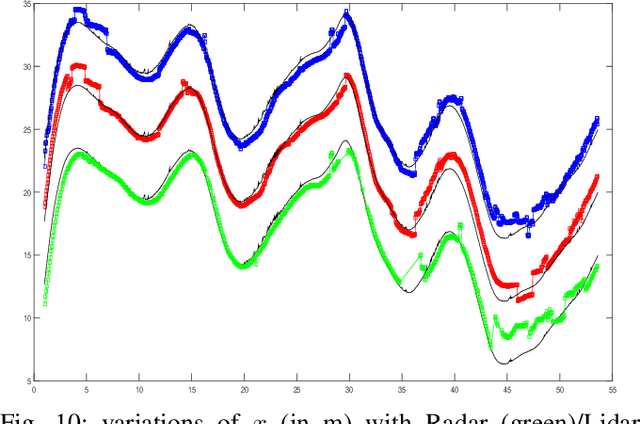
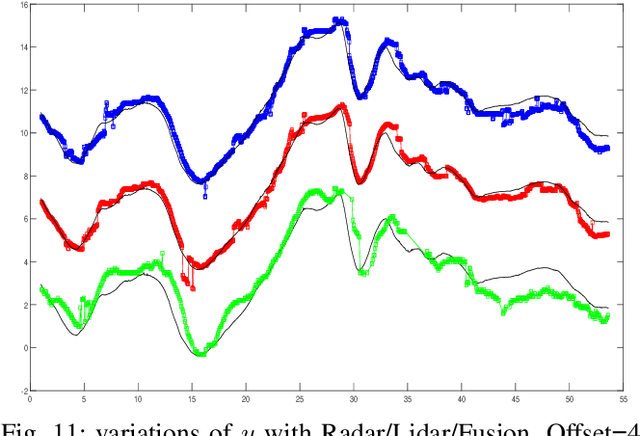
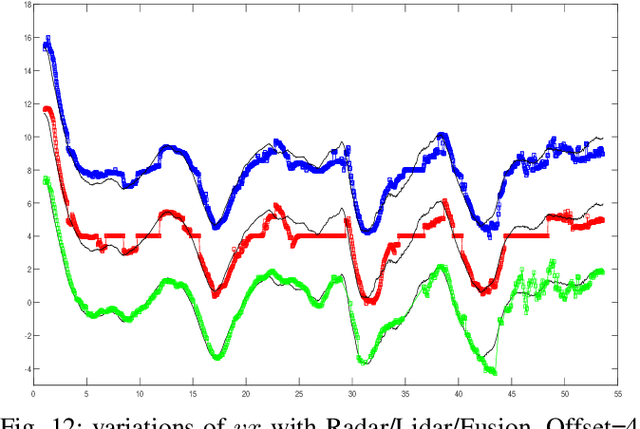
- Both Lidars and Radars are sensors for obstacle detection. While Lidars are very accurate on obstacles positions and less accurate on their velocities, Radars are more precise on obstacles velocities and less precise on their positions. Sensor fusion between Lidar and Radar aims at improving obstacle detection using advantages of the two sensors. The present paper proposes a real-time Lidar/Radar data fusion algorithm for obstacle detection and tracking based on the global nearest neighbour standard filter (GNN). This algorithm is implemented and embedded in an automative vehicle as a component generated by a real-time multisensor software. The benefits of data fusion comparing with the use of a single sensor are illustrated through several tracking scenarios (on a highway and on a bend) and using real-time kinematic sensors mounted on the ego and tracked vehicles as a ground truth.
Automatic generation of ground truth for the evaluation of obstacle detection and tracking techniques
Jul 16, 2018
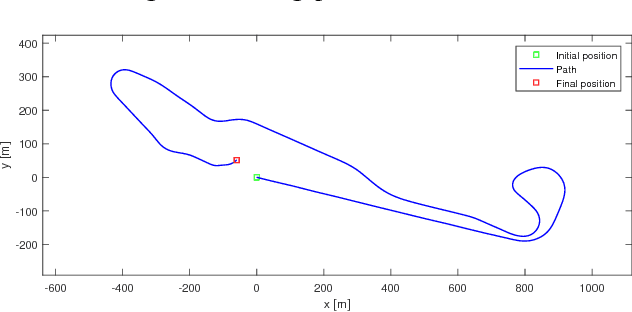

As automated vehicles are getting closer to becoming a reality, it will become mandatory to be able to characterise the performance of their obstacle detection systems. This validation process requires large amounts of ground-truth data, which is currently generated by manually annotation. In this paper, we propose a novel methodology to generate ground-truth kinematics datasets for specific objects in real-world scenes. Our procedure requires no annotation whatsoever, human intervention being limited to sensors calibration. We present the recording platform which was exploited to acquire the reference data and a detailed and thorough analytical study of the propagation of errors in our procedure. This allows us to provide detailed precision metrics for each and every data item in our datasets. Finally some visualisations of the acquired data are given.