 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNo Need for Interactions: Robust Model-Based Imitation Learning using Neural ODE
Apr 03, 2021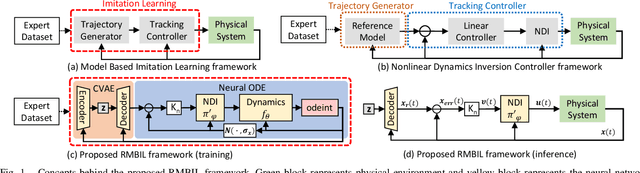
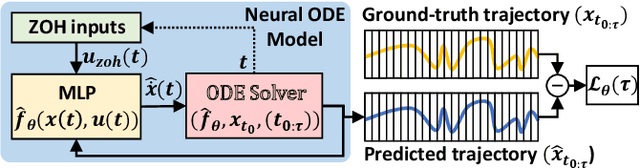
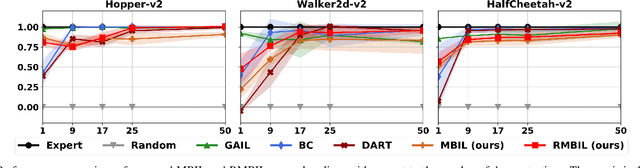
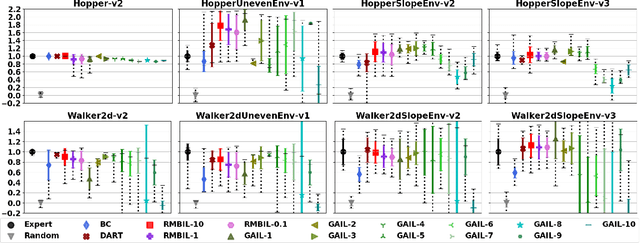
Interactions with either environments or expert policies during training are needed for most of the current imitation learning (IL) algorithms. For IL problems with no interactions, a typical approach is Behavior Cloning (BC). However, BC-like methods tend to be affected by distribution shift. To mitigate this problem, we come up with a Robust Model-Based Imitation Learning (RMBIL) framework that casts imitation learning as an end-to-end differentiable nonlinear closed-loop tracking problem. RMBIL applies Neural ODE to learn a precise multi-step dynamics and a robust tracking controller via Nonlinear Dynamics Inversion (NDI) algorithm. Then, the learned NDI controller will be combined with a trajectory generator, a conditional VAE, to imitate an expert's behavior. Theoretical derivation shows that the controller network can approximate an NDI when minimizing the training loss of Neural ODE. Experiments on Mujoco tasks also demonstrate that RMBIL is competitive to the state-of-the-art generative adversarial method (GAIL) and achieves at least 30% performance gain over BC in uneven surfaces.
Autonomous Overtaking in Gran Turismo Sport Using Curriculum Reinforcement Learning
Mar 26, 2021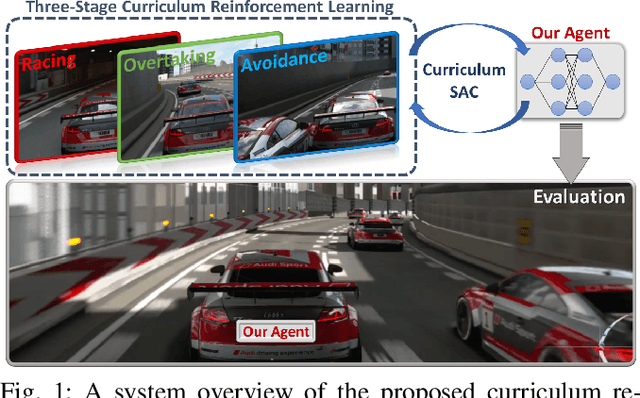
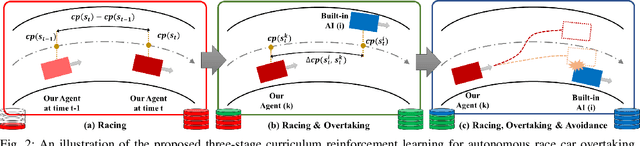
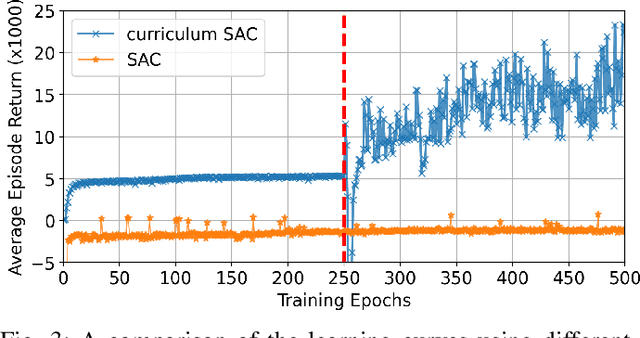
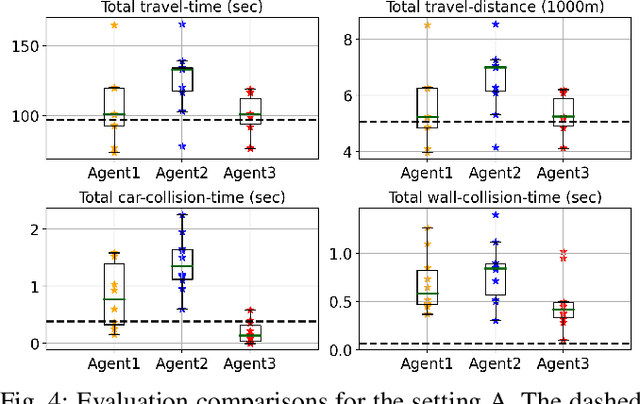
Professional race car drivers can execute extreme overtaking maneuvers. However, conventional systems for autonomous overtaking rely on either simplified assumptions about the vehicle dynamics or solving expensive trajectory optimization problems online. When the vehicle is approaching its physical limits, existing model-based controllers struggled to handle highly nonlinear dynamics and cannot leverage the large volume of data generated by simulation or real-world driving. To circumvent these limitations, this work proposes a new learning-based method to tackle the autonomous overtaking problem. We evaluate our approach using Gran Turismo Sport -- a world-leading car racing simulator known for its detailed dynamic modeling of various cars and tracks. By leveraging curriculum learning, our approach leads to faster convergence as well as increased performance compared to vanilla reinforcement learning. As a result, the trained controller outperforms the built-in model-based game AI and achieves comparable overtaking performance with an experienced human driver.