 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmall Models, Strong Priors: Architectural Inductive Bias for Parameter-Efficient Neural PDE Solvers
May 25, 2026Neural PDE solvers have followed the scaling trajectory of vision and language, with recent foundation models reaching billions of parameters. We argue that scale is a poor substitute for architectural inductive bias in this domain: structured priors deliver outsized parameter efficiency, and the pattern of where they succeed and fail is itself informative about what they capture. We instantiate this argument in WaveLiT, an architecture combining a discrete wavelet transform for lossless multi-resolution tokenization, an augmented linear attention block, a shared-weight multiscale feature pyramid, and a wavelet-domain auxiliary loss. Bespoke 1-10M-parameter WaveLiT models compete with foundation models of 100-1000$\times$ their size across eight TheWell benchmarks, with the largest gains on wave and acoustic-dominated benchmarks where the wavelet-multiscale prior fits the dominant dynamical structure and small per-step errors do not compound geometrically under rollout. Trained jointly across all eight benchmarks, a 10M-parameter foundation variant exhibits a structured, physically interpretable transfer pattern -- strongest where the wavelet-multiscale prior matches the dynamics, weakest on chaotic advection-dominated flows. The entire pipeline trains on a single GPU. The results suggest that small-model PDE performance is shaped by architectural inductive bias rather than scale, and that the structure of a prior's failures is a useful empirical signal about its content.
GeoBrowse: A Geolocation Benchmark for Agentic Tool Use with Expert-Annotated Reasoning Traces
Apr 05, 2026Deep research agents integrate fragmented evidence through multi-step tool use. BrowseComp offers a text-only testbed for such agents, but existing multimodal benchmarks rarely require both weak visual cues composition and BrowseComp-style multi-hop verification. Geolocation is a natural testbed because answers depend on combining multiple ambiguous visual cues and validating them with open-web evidence. Thus, we introduce GeoBrowse, a geolocation benchmark that combines visual reasoning with knowledge-intensive multi-hop queries. Level 1 tests extracting and composing fragmented visual cues, and Level 2 increases query difficulty by injecting long-tail knowledge and obfuscating key entities. To support evaluation, we provide an agentic workflow GATE with five think-with-image tools and four knowledge-intensive tools, and release expert-annotated stepwise traces grounded in verifiable evidence for trajectory-level analysis. Experiments show that GATE outperforms direct inference and open-source agents, indicating that no-tool, search-only or image-only setups are insufficient. Gains come from coherent, level-specific tool-use plans rather than more tool calls, as they more reliably reach annotated key evidence steps and make fewer errors when integrating into the final decision. The GeoBrowse bernchmark and codes are provided in https://github.com/ornamentt/GeoBrowse
Efficient and Versatile Quadrupedal Skating: Optimal Co-design via Reinforcement Learning and Bayesian Optimization
Mar 19, 2026In this paper, we present a hardware-control co-design approach that enables efficient and versatile roller skating on quadrupedal robots equipped with passive wheels. Passive-wheel skating reduces leg inertia and improves energy efficiency, particularly at high speeds. However, the absence of direct wheel actuation tightly couples mechanical design and control. To unlock the full potential of this modality, we formulate a bilevel optimization framework: an upper-level Bayesian Optimization searches the mechanical design space, while a lower-level Reinforcement Learning trains a motor control policy for each candidate design. The resulting design-policy pairs not only outperform human-engineered baselines, but also exhibit versatile behaviors such as hockey stop (rapid braking by turning sideways to maximize friction) and self-aligning motion (automatic reorientation to improve energy efficiency in the direction of travel), offering the first system-level study of dynamic skating motion on quadrupedal robots.
SPARK: Skeleton-Parameter Aligned Retargeting on Humanoid Robots with Kinodynamic Trajectory Optimization
Mar 12, 2026Human motion provides rich priors for training general-purpose humanoid control policies, but raw demonstrations are often incompatible with a robot's kinematics and dynamics, limiting their direct use. We present a two-stage pipeline for generating natural and dynamically feasible motion references from task-space human data. First, we convert human motion into a unified robot description format (URDF)-based skeleton representation and calibrate it to the target humanoid's dimensions. By aligning the underlying skeleton structure rather than heuristically modifying task-space targets, this step significantly reduces inverse kinematics error and tuning effort. Second, we refine the retargeted trajectories through progressive kinodynamic trajectory optimization (TO), solved in three stages: kinematic TO, inverse dynamics, and full kinodynamic TO, each warm-started from the previous solution. The final result yields dynamically consistent state trajectories and joint torque profiles, providing high-quality references for learning-based controllers. Together, skeleton calibration and kinodynamic TO enable the generation of natural, physically consistent motion references across diverse humanoid platforms.
A Study on Enhancing the Generalization Ability of Visuomotor Policies via Data Augmentation
Nov 13, 2025The generalization ability of visuomotor policy is crucial, as a good policy should be deployable across diverse scenarios. Some methods can collect large amounts of trajectory augmentation data to train more generalizable imitation learning policies, aimed at handling the random placement of objects on the scene's horizontal plane. However, the data generated by these methods still lack diversity, which limits the generalization ability of the trained policy. To address this, we investigate the performance of policies trained by existing methods across different scene layout factors via automate the data generation for those factors that significantly impact generalization. We have created a more extensively randomized dataset that can be efficiently and automatically generated with only a small amount of human demonstration. The dataset covers five types of manipulators and two types of grippers, incorporating extensive randomization factors such as camera pose, lighting conditions, tabletop texture, and table height across six manipulation tasks. We found that all of these factors influence the generalization ability of the policy. Applying any form of randomization enhances policy generalization, with diverse trajectories particularly effective in bridging visual gap. Notably, we investigated on low-cost manipulator the effect of the scene randomization proposed in this work on enhancing the generalization capability of visuomotor policies for zero-shot sim-to-real transfer.
6-DoF Grasp Detection in Clutter with Enhanced Receptive Field and Graspable Balance Sampling
Jul 01, 2024



6-DoF grasp detection of small-scale grasps is crucial for robots to perform specific tasks. This paper focuses on enhancing the recognition capability of small-scale grasping, aiming to improve the overall accuracy of grasping prediction results and the generalization ability of the network. We propose an enhanced receptive field method that includes a multi-radii cylinder grouping module and a passive attention module. This method enhances the receptive field area within the graspable space and strengthens the learning of graspable features. Additionally, we design a graspable balance sampling module based on a segmentation network, which enables the network to focus on features of small objects, thereby improving the recognition capability of small-scale grasping. Our network achieves state-of-the-art performance on the GraspNet-1Billion dataset, with an overall improvement of approximately 10% in average precision@k (AP). Furthermore, we deployed our grasp detection model in pybullet grasping platform, which validates the effectiveness of our method.
Bridging Operator Learning and Conditioned Neural Fields: A Unifying Perspective
May 22, 2024Operator learning is an emerging area of machine learning which aims to learn mappings between infinite dimensional function spaces. Here we uncover a connection between operator learning architectures and conditioned neural fields from computer vision, providing a unified perspective for examining differences between popular operator learning models. We find that many commonly used operator learning models can be viewed as neural fields with conditioning mechanisms restricted to point-wise and/or global information. Motivated by this, we propose the Continuous Vision Transformer (CViT), a novel neural operator architecture that employs a vision transformer encoder and uses cross-attention to modulate a base field constructed with a trainable grid-based positional encoding of query coordinates. Despite its simplicity, CViT achieves state-of-the-art results across challenging benchmarks in climate modeling and fluid dynamics. Our contributions can be viewed as a first step towards adapting advanced computer vision architectures for building more flexible and accurate machine learning models in physical sciences.
A Human-Machine Joint Learning Framework to Boost Endogenous BCI Training
Aug 25, 2023



Brain-computer interfaces (BCIs) provide a direct pathway from the brain to external devices and have demonstrated great potential for assistive and rehabilitation technologies. Endogenous BCIs based on electroencephalogram (EEG) signals, such as motor imagery (MI) BCIs, can provide some level of control. However, mastering spontaneous BCI control requires the users to generate discriminative and stable brain signal patterns by imagery, which is challenging and is usually achieved over a very long training time (weeks/months). Here, we propose a human-machine joint learning framework to boost the learning process in endogenous BCIs, by guiding the user to generate brain signals towards an optimal distribution estimated by the decoder, given the historical brain signals of the user. To this end, we firstly model the human-machine joint learning process in a uniform formulation. Then a human-machine joint learning framework is proposed: 1) for the human side, we model the learning process in a sequential trial-and-error scenario and propose a novel ``copy/new'' feedback paradigm to help shape the signal generation of the subject toward the optimal distribution; 2) for the machine side, we propose a novel adaptive learning algorithm to learn an optimal signal distribution along with the subject's learning process. Specifically, the decoder reweighs the brain signals generated by the subject to focus more on ``good'' samples to cope with the learning process of the subject. Online and psuedo-online BCI experiments with 18 healthy subjects demonstrated the advantages of the proposed joint learning process over co-adaptive approaches in both learning efficiency and effectiveness.
An Expert's Guide to Training Physics-informed Neural Networks
Aug 16, 2023



Physics-informed neural networks (PINNs) have been popularized as a deep learning framework that can seamlessly synthesize observational data and partial differential equation (PDE) constraints. Their practical effectiveness however can be hampered by training pathologies, but also oftentimes by poor choices made by users who lack deep learning expertise. In this paper we present a series of best practices that can significantly improve the training efficiency and overall accuracy of PINNs. We also put forth a series of challenging benchmark problems that highlight some of the most prominent difficulties in training PINNs, and present comprehensive and fully reproducible ablation studies that demonstrate how different architecture choices and training strategies affect the test accuracy of the resulting models. We show that the methods and guiding principles put forth in this study lead to state-of-the-art results and provide strong baselines that future studies should use for comparison purposes. To this end, we also release a highly optimized library in JAX that can be used to reproduce all results reported in this paper, enable future research studies, as well as facilitate easy adaptation to new use-case scenarios.
Random Weight Factorization Improves the Training of Continuous Neural Representations
Oct 05, 2022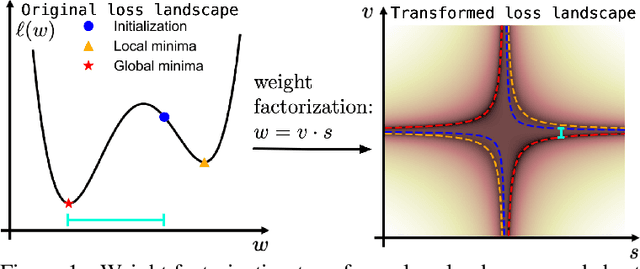
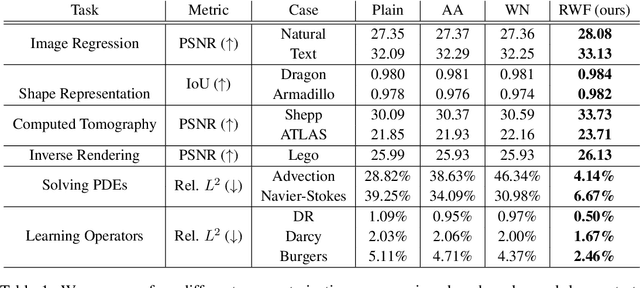
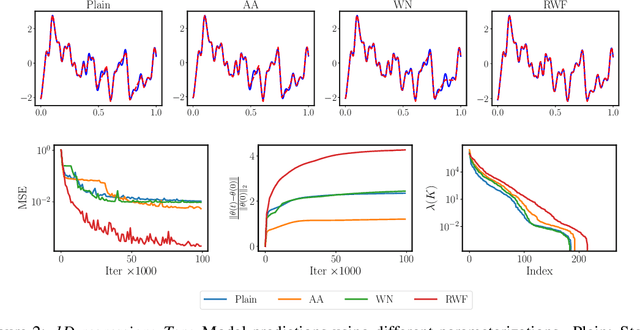
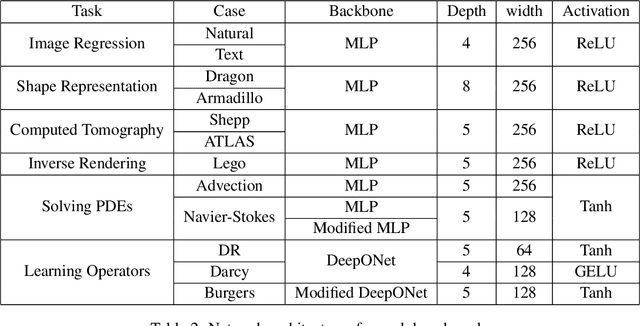
Continuous neural representations have recently emerged as a powerful and flexible alternative to classical discretized representations of signals. However, training them to capture fine details in multi-scale signals is difficult and computationally expensive. Here we propose random weight factorization as a simple drop-in replacement for parameterizing and initializing conventional linear layers in coordinate-based multi-layer perceptrons (MLPs) that significantly accelerates and improves their training. We show how this factorization alters the underlying loss landscape and effectively enables each neuron in the network to learn using its own self-adaptive learning rate. This not only helps with mitigating spectral bias, but also allows networks to quickly recover from poor initializations and reach better local minima. We demonstrate how random weight factorization can be leveraged to improve the training of neural representations on a variety of tasks, including image regression, shape representation, computed tomography, inverse rendering, solving partial differential equations, and learning operators between function spaces.