 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViBA: Implicit Bundle Adjustment with Geometric and Temporal Consistency for Robust Visual Matching
Apr 03, 2026Most existing image keypoint detection and description methods rely on datasets with accurate pose and depth annotations, limiting scalability and generalization, and often degrading navigation and localization performance. We propose ViBA, a sustainable learning framework that integrates geometric optimization with feature learning for continuous online training on unconstrained video streams. Embedded in a standard visual odometry pipeline, it consists of an implicitly differentiable geometric residual framework: (i) an initial tracking network for inter-frame correspondences, (ii) depth-based outlier filtering, and (iii) differentiable global bundle adjustment that jointly refines camera poses and feature positions by minimizing reprojection errors. By combining geometric consistency from BA with long-term temporal consistency across frames, ViBA enforces stable and accurate feature representations. We evaluate ViBA on EuRoC and UMA datasets. Compared with state-of-the-art methods such as SuperPoint+SuperGlue, ALIKED, and LightGlue, ViBA reduces mean absolute translation error (ATE) by 12-18% and absolute rotation error (ARE) by 5-10% across sequences, while maintaining real-time inference speeds (FPS 36-91). When evaluated on unseen sequences, it retains over 90% localization accuracy, demonstrating robust generalization. These results show that ViBA supports continuous online learning with geometric and temporal consistency, consistently improving navigation and localization in real-world scenarios.
PA-LVIO: Real-Time LiDAR-Visual-Inertial Odometry and Mapping with Pose-Only Bundle Adjustment
Mar 17, 2026Real-time LiDAR-visual-inertial odometry and mapping is crucial for navigation and planning tasks in intelligent transportation systems. This study presents a pose-only bundle adjustment (PA) LiDAR-visual-inertial odometry (LVIO), named PA-LVIO, to meet the urgent need for real-time navigation and mapping. The proposed PA framework for LiDAR and visual measurements is highly accurate and efficient, and it can derive reliable frame-to-frame constraints within multiple frames. A marginalization-free and frame-to-map (F2M) LiDAR measurement model is integrated into the state estimator to eliminate odometry drifts. Meanwhile, an IMU-centric online spatial-temporal calibration is employed to obtain a pixel-wise LiDAR-camera alignment. With accurate estimated odometry and extrinsics, a high-quality and RGB-rendered point-cloud map can be built. Comprehensive experiments are conducted on both public and private datasets collected by wheeled robot, unmanned aerial vehicle (UAV), and handheld devices with 28 sequences and more than 50 km trajectories. Sufficient results demonstrate that the proposed PA-LVIO yields superior or comparable performance to state-of-the-art LVIO methods, in terms of the odometry accuracy and mapping quality. Besides, PA-LVIO can run in real-time on both the desktop PC and the onboard ARM computer.
SELC: Self-Supervised Efficient Local Correspondence Learning for Low Quality Images
Apr 06, 2025



Accurate and stable feature matching is critical for computer vision tasks, particularly in applications such as Simultaneous Localization and Mapping (SLAM). While recent learning-based feature matching methods have demonstrated promising performance in challenging spatiotemporal scenarios, they still face inherent trade-offs between accuracy and computational efficiency in specific settings. In this paper, we propose a lightweight feature matching network designed to establish sparse, stable, and consistent correspondence between multiple frames. The proposed method eliminates the dependency on manual annotations during training and mitigates feature drift through a hybrid self-supervised paradigm. Extensive experiments validate three key advantages: (1) Our method operates without dependency on external prior knowledge and seamlessly incorporates its hybrid training mechanism into original datasets. (2) Benchmarked against state-of-the-art deep learning-based methods, our approach maintains equivalent computational efficiency at low-resolution scales while achieving a 2-10x improvement in computational efficiency for high-resolution inputs. (3) Comparative evaluations demonstrate that the proposed hybrid self-supervised scheme effectively mitigates feature drift in long-term tracking while maintaining consistent representation across image sequences.
MR-ULINS: A Tightly-Coupled UWB-LiDAR-Inertial Estimator with Multi-Epoch Outlier Rejection
Aug 11, 2024



The LiDAR-inertial odometry (LIO) and the ultra-wideband (UWB) have been integrated together to achieve driftless positioning in global navigation satellite system (GNSS)-denied environments. However, the UWB may be affected by systematic range errors (such as the clock drift and the antenna phase center offset) and non-line-of-sight (NLOS) signals, resulting in reduced robustness. In this study, we propose a UWB-LiDAR-inertial estimator (MR-ULINS) that tightly integrates the UWB range, LiDAR frame-to-frame, and IMU measurements within the multi-state constraint Kalman filter (MSCKF) framework. The systematic range errors are precisely modeled to be estimated and compensated online. Besides, we propose a multi-epoch outlier rejection algorithm for UWB NLOS by utilizing the relative accuracy of the LIO. Specifically, the relative trajectory of the LIO is employed to verify the consistency of all range measurements within the sliding window. Extensive experiment results demonstrate that MR-ULINS achieves a positioning accuracy of around 0.1 m in complex indoor environments with severe NLOS interference. Ablation experiments show that the online estimation and multi-epoch outlier rejection can effectively improve the positioning accuracy. Besides, MR-ULINS maintains high accuracy and robustness in LiDAR-degenerated scenes and UWB-challenging conditions with spare base stations.
MSC-LIO: An MSCKF-Based LiDAR-Inertial Odometry with Same-Plane-Point Tracking
Jul 10, 2024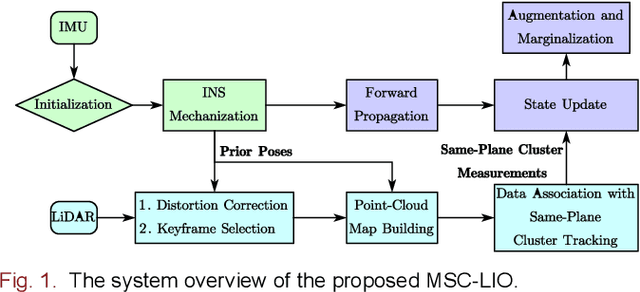
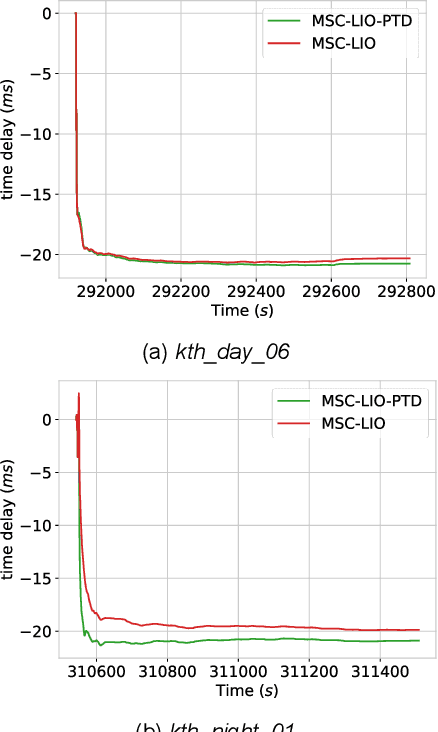

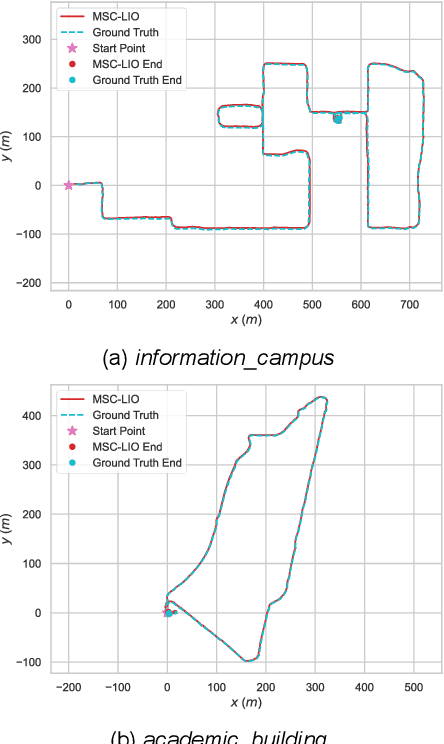
The multi-state constraint Kalman filter (MSCKF) has been proven to be more efficient than graph optimization for visual-based odometry while with similar accuracy. However, it has not yet been properly considered and studied for LiDAR-based odometry. In this paper, we propose a novel tightly coupled LiDAR-inertial odometry based on the MSCKF framework, named MSC-LIO. An efficient LiDAR same-plane-point (LSPP) tracking method, without explicit feature extraction, is present for frame-to-frame data associations. The tracked LSPPs are employed to build an LSPP measurement model, which constructs a multi-state constraint. Besides, we propose an effective point-velocity-based LiDAR-IMU time-delay (LITD) estimation method, which is derived from the proposed LSPP tracking method. Extensive experiments were conducted on both public and private datasets. The results demonstrate that the proposed MSC-LIO yields higher accuracy and efficiency than the state-of-the-art methods. The ablation experiment results indicate that the data-association efficiency is improved by nearly 3 times using the LSPP tracking method. Besides, the proposed LITD estimation method can effectively and accurately estimate the LITD.
BA-LINS: A Frame-to-Frame Bundle Adjustment for LiDAR-Inertial Navigation
Jan 21, 2024



Bundle Adjustment (BA) has been proven to improve the accuracy of the LiDAR mapping. However, the BA method has not been properly employed in a dead-reckoning navigation system. In this paper, we present a frame-to-frame (F2F) BA for LiDAR-inertial navigation, named BA-LINS. Based on the direct F2F point-cloud association, the same-plane points are associated among the LiDAR keyframes. Hence, the plane-point BA measurement can be constructed using the same-plane points. The LiDAR BA measurements and the inertial measurement unit (IMU)-preintegration measurements are tightly integrated under the framework of factor graph optimization. An effective adaptive covariance estimation algorithm for LiDAR BA measurements is proposed to further improve the accuracy of BA-LINS. We conduct exhaustive real-world experiments on public and private datasets to examine the proposed BA-LINS. The results demonstrate that BA-LINS yields superior accuracy to state-of-the-art methods. Compared to the baseline system FF-LINS, the absolute translation accuracy and state-estimation efficiency of BA-LINS are improved by 29.5% and 28.7%, respectively, on the private dataset. Besides, the ablation experiment results exhibit that the proposed adaptive covariance estimation algorithm can notably improve the accuracy and robustness of BA-LINS.
SE-LIO: Semantics-enhanced Solid-State-LiDAR-Inertial Odometry for Tree-rich Environments
Dec 04, 2023



In this letter, we propose a semantics-enhanced solid-state-LiDAR-inertial odometry (SE-LIO) in tree-rich environments. Multiple LiDAR frames are first merged and compensated with the inertial navigation system (INS) to increase the point-cloud coverage, thus improving the accuracy of semantic segmentation. The unstructured point clouds, such as tree leaves and dynamic objects, are then removed with the semantic information. Furthermore, the pole-like point clouds, primarily tree trunks, are modeled as cylinders to improve positioning accuracy. An adaptive piecewise cylinder-fitting method is proposed to accommodate environments with a high prevalence of curved tree trunks. Finally, the iterated error-state Kalman filter (IESKF) is employed for state estimation. Point-to-cylinder and point-to-plane constraints are tightly coupled with the prior constraints provided by the INS to obtain the maximum a posteriori estimation. Targeted experiments are conducted in complex campus and park environments to evaluate the performance of SE-LIO. The proposed methods, including removing the unstructured point clouds and the adaptive cylinder fitting, yield improved accuracy. Specifically, the positioning accuracy of the proposed SE-LIO is improved by 43.1% compared to the plane-based LIO.
FF-LINS: A Consistent Frame-to-Frame Solid-State-LiDAR-Inertial State Estimator
Jul 13, 2023



Most of the existing LiDAR-inertial navigation systems are based on frame-to-map registrations, leading to inconsistency in state estimation. The newest solid-state LiDAR with a non-repetitive scanning pattern makes it possible to achieve a consistent LiDAR-inertial estimator by employing a frame-to-frame data association. In this letter, we propose a robust and consistent frame-to-frame LiDAR-inertial navigation system (FF-LINS) for solid-state LiDARs. With the INS-centric LiDAR frame processing, the keyframe point-cloud map is built using the accumulated point clouds to construct the frame-to-frame data association. The LiDAR frame-to-frame and the inertial measurement unit (IMU) preintegration measurements are tightly integrated using the factor graph optimization, with online calibration of the LiDAR-IMU extrinsic and time-delay parameters. The experiments on the public and private datasets demonstrate that the proposed FF-LINS achieves superior accuracy and robustness than the state-of-the-art systems. Besides, the LiDAR-IMU extrinsic and time-delay parameters are estimated effectively, and the online calibration notably improves the pose accuracy. The proposed FF-LINS and the employed datasets are open-sourced on GitHub (https://github.com/i2Nav-WHU/FF-LINS).
PO-VINS: An Efficient Pose-Only LiDAR-Enhanced Visual-Inertial State Estimator
May 22, 2023



The pose-only (PO) visual representation has been proven to be equivalent to the classical multiple-view geometry, while significantly improving computational efficiency. However, its applicability for real-world navigation in large-scale complex environments has not yet been demonstrated. In this study, we present an efficient pose-only LiDAR-enhanced visual-inertial navigation system (PO-VINS) to enhance the real-time performance of the state estimator. In the visual-inertial state estimator (VISE), we propose a pose-only visual-reprojection measurement model that only contains the inertial measurement unit (IMU) pose and extrinsic-parameter states. We further integrated the LiDAR-enhanced method to construct a pose-only LiDAR-depth measurement model. Real-world experiments were conducted in large-scale complex environments, demonstrating that the proposed PO-VISE and LiDAR-enhanced PO-VISE reduce computational complexity by more than 50% and over 20%, respectively. Additionally, the PO-VINS yields the same accuracy as conventional methods. These results indicate that the pose-only solution is efficient and applicable for real-time visual-inertial state estimation.
IC-GVINS: A Robust, Real-time, INS-Centric GNSS-Visual-Inertial Navigation System for Wheeled Robot
Apr 11, 2022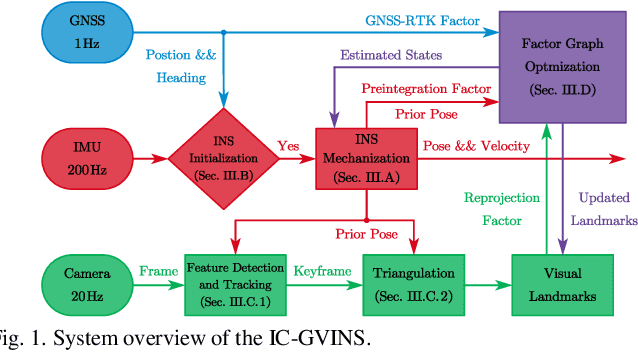
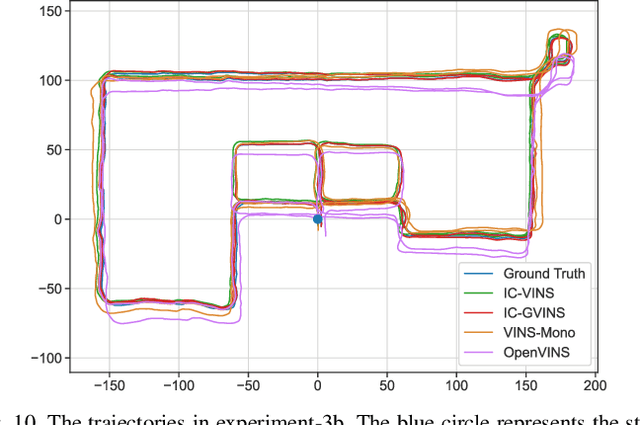
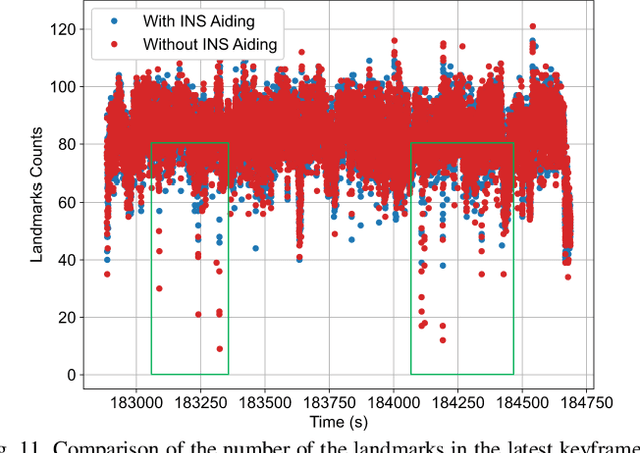
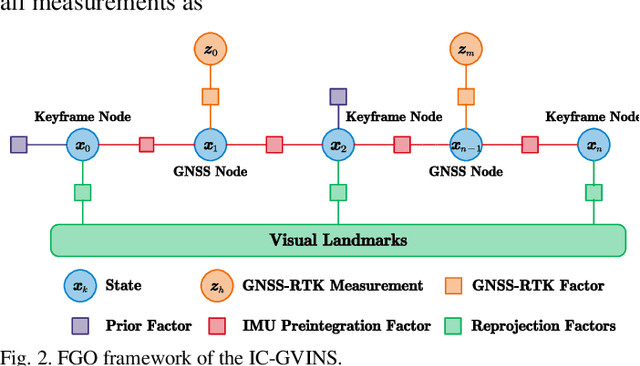
In this letter, we present a robust, real-time, inertial navigation system (INS)-Centric GNSS-Visual-Inertial navigation system (IC-GVINS) for wheeled robot, in which the precise INS is fully utilized in both the state estimation and visual process. To improve the system robustness, the INS information is employed during the whole keyframe-based visual process, with strict outlier-culling strategy. GNSS is adopted to perform an accurate and convenient initialization of the IC-GVINS, and is further employed to achieve absolute positioning in large-scale environments. The IMU, visual, and GNSS measurements are tightly fused within the framework of factor graph optimization. Dedicated experiments were conducted to evaluate the robustness and accuracy of the IC-GVINS on a wheeled robot. The IC-GVINS demonstrates superior robustness in various visual-degenerated scenes with moving objects. Compared to the state-of-the-art visual-inertial navigation systems, the proposed method yields improved robustness and accuracy in various environments. We open source our codes combined with the dataset on GitHub