 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Consequentialist Critique of Binary Classification Evaluation Practices
Apr 06, 2025ML-supported decisions, such as ordering tests or determining preventive custody, often involve binary classification based on probabilistic forecasts. Evaluation frameworks for such forecasts typically consider whether to prioritize independent-decision metrics (e.g., Accuracy) or top-K metrics (e.g., Precision@K), and whether to focus on fixed thresholds or threshold-agnostic measures like AUC-ROC. We highlight that a consequentialist perspective, long advocated by decision theorists, should naturally favor evaluations that support independent decisions using a mixture of thresholds given their prevalence, such as Brier scores and Log loss. However, our empirical analysis reveals a strong preference for top-K metrics or fixed thresholds in evaluations at major conferences like ICML, FAccT, and CHIL. To address this gap, we use this decision-theoretic framework to map evaluation metrics to their optimal use cases, along with a Python package, briertools, to promote the broader adoption of Brier scores. In doing so, we also uncover new theoretical connections, including a reconciliation between the Brier Score and Decision Curve Analysis, which clarifies and responds to a longstanding critique by (Assel, et al. 2017) regarding the clinical utility of proper scoring rules.
Teleoperated aerial manipulator and its avatar. Part 1: Communication, system's interconnection, control, and virtual world
Oct 19, 2020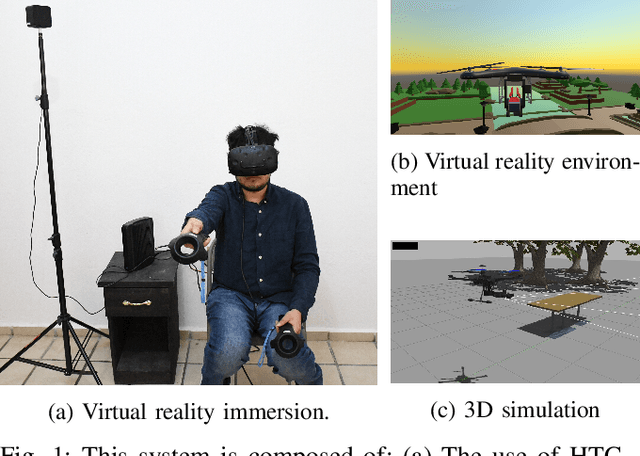
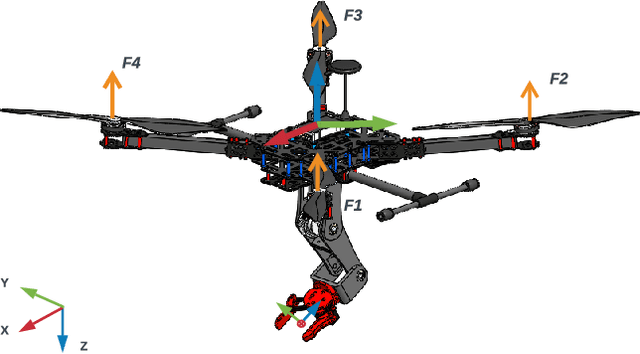
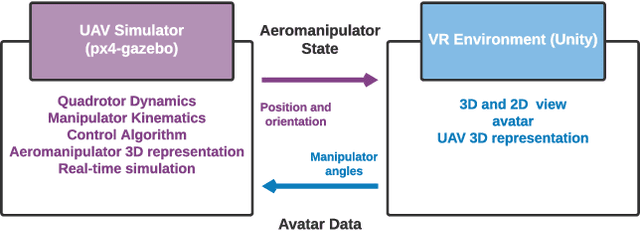

The tasks that an aerial manipulator can perform are incredibly diverse. However, nowadays the technology is not completely developed to achieve complex tasks autonomously. That's why we propose a human-in-the-loop system that can control a semi-autonomous aerial manipulator to accomplish these kinds of tasks. Furthermore, motivated by the growing trend of virtual reality systems, together with teleoperation, we develop a system composed of: an aerial manipulator model programmed in PX4 and modeled in Gazebo, a virtual reality immersion with an interactive controller, and the interconnection between the aforementioned systems via the Internet. This research is the first part of a broader project. In this part, we present experiments in the software in the loop simulation. The code of this work is liberated on our GitHub page. Also, a video shows the conducted experiments.
The STDyn-SLAM: A stereo vision and semantic segmentation approach for SLAM in dynamic outdoor environments
Oct 19, 2020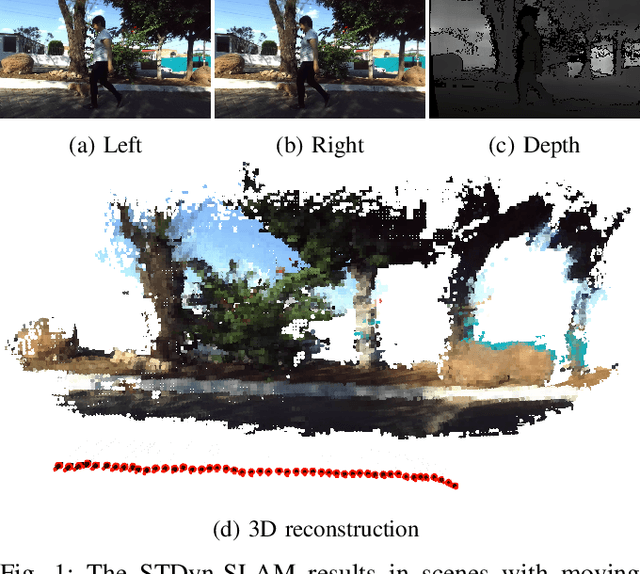
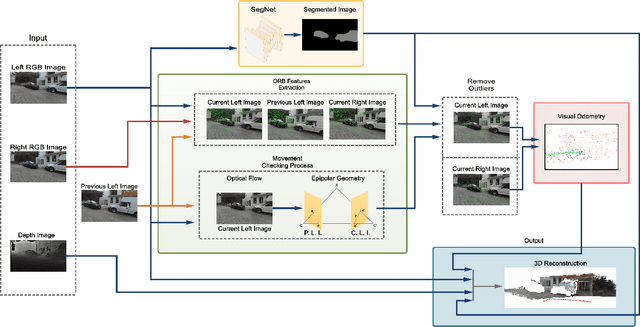
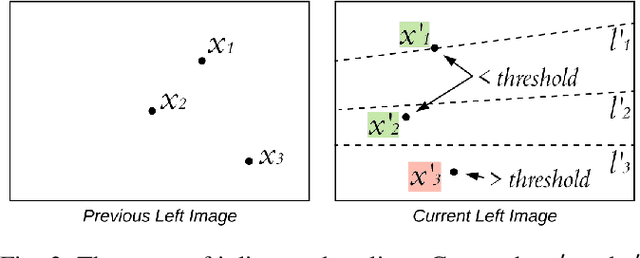
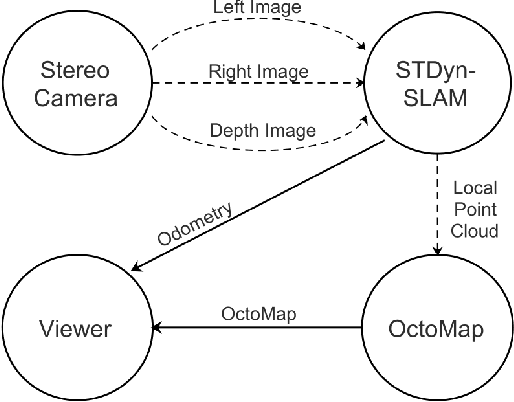
Commonly, SLAM algorithms are focused on a static environment, however, there are several scenes where dynamic objects are present. This work presents the STDyn-SLAM an image feature-based SLAM system working on dynamic environments using a series of sub-systems, like optic flow, orb features extraction, visual odometry, and convolutional neural networks to discern moving objects in the scene. The neural network is used to support object detection and segmentation to avoid erroneous maps and wrong system localization. The STDyn-SLAM employs a stereo pair and is developed for outdoor environments. Moreover, the processing time of the proposed system is fast enough to run in real-time as it was demonstrated through the experiments given in real dynamic outdoor environments. Further, we compare our SLAM with state-of-the-art methods achieving promising results.
Transition control of a tail-sitter UAV using recurrent neural networks
Jun 29, 2020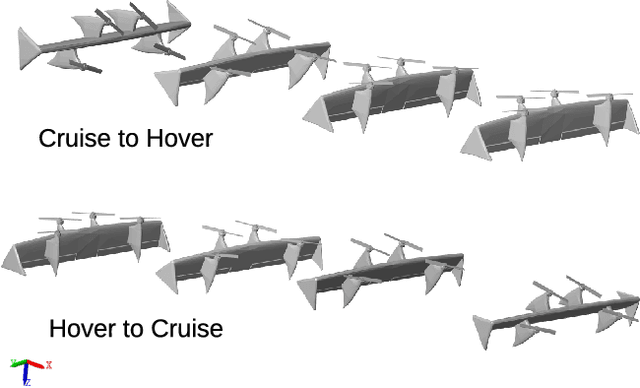
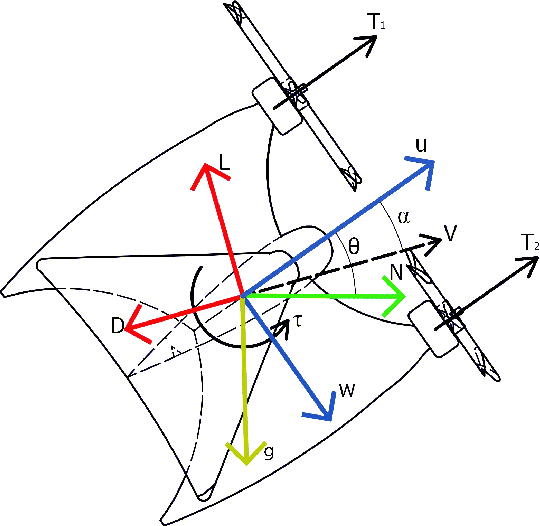
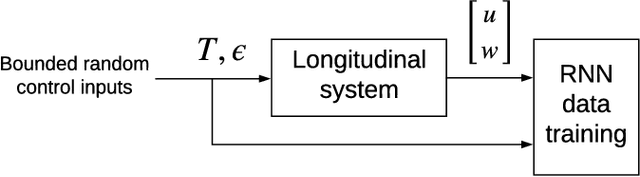
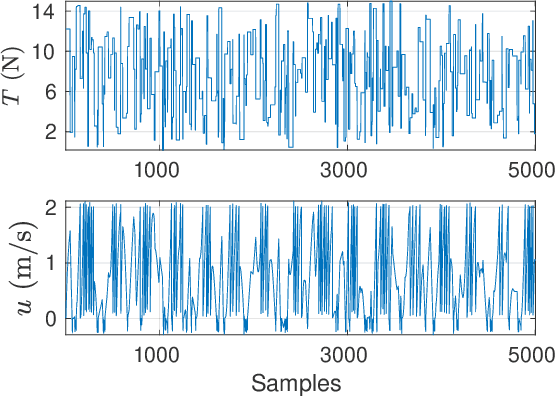
This paper presents the implementation of a Recurrent Neural Network (RNN) based-controller for the stabilization of the flight transition maneuver (hover-cruise and vice versa) of a tail-sitter UAV. The control strategy is based on attitude and velocity stabilization. For that aim, the RNN is used for the estimation of high nonlinear aerodynamic terms during the transition stage. Then, this estimate is used together with a feedback linearization technique for stabilizing the entire system. Results show convergence of linear velocities and the pitch angle during the transition maneuver. To analyze the performance of our proposed control strategy, we present simulations for the transition from hover to cruise and vice versa.
Desmoking laparoscopy surgery images using an image-to-image translation guided by an embedded dark channel
Apr 19, 2020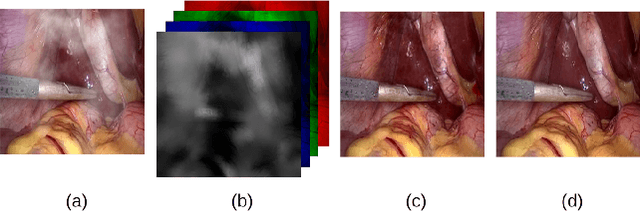
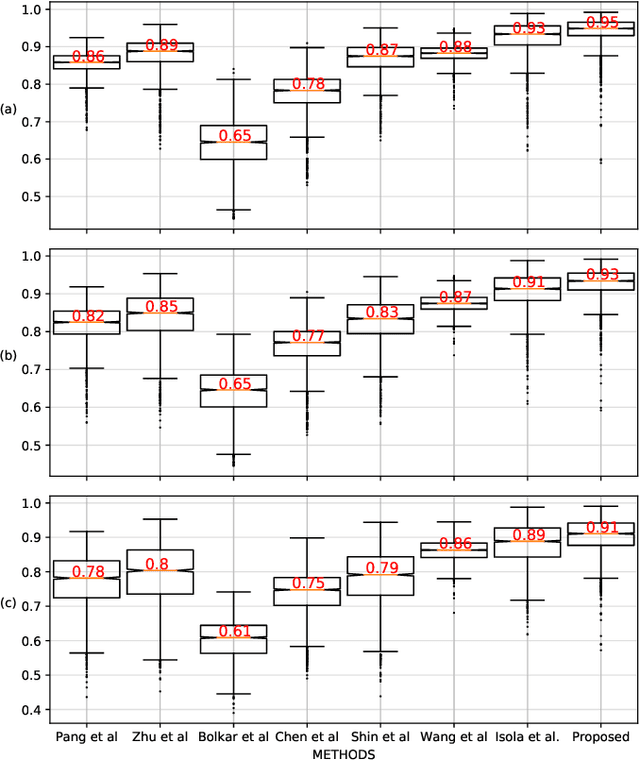
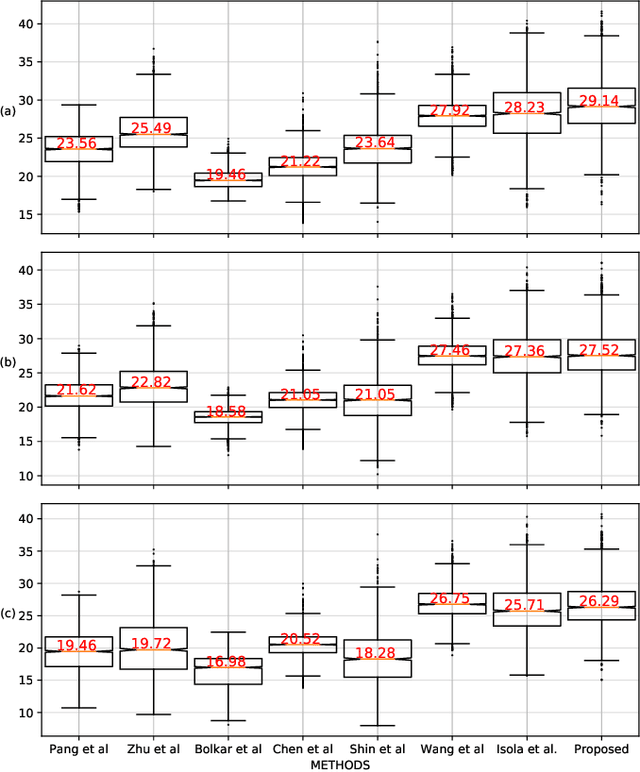
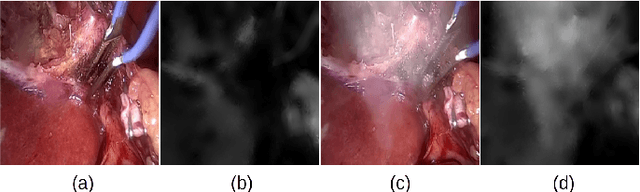
In laparoscopic surgery, the visibility in the image can be severely degraded by the smoke caused by the $CO_2$ injection, and dissection tools, thus reducing the visibility of organs and tissues. This lack of visibility increases the surgery time and even the probability of mistakes conducted by the surgeon, then producing negative consequences on the patient's health. In this paper, a novel computational approach to remove the smoke effects is introduced. The proposed method is based on an image-to-image conditional generative adversarial network in which a dark channel is used as an embedded guide mask. Obtained experimental results are evaluated and compared quantitatively with other desmoking and dehazing state-of-art methods using the metrics of the Peak Signal-to-Noise Ratio (PSNR) and Structural Similarity (SSIM) index. Based on these metrics, it is found that the proposed method has improved performance compared to the state-of-the-art. Moreover, the processing time required by our method is 92 frames per second, and thus, it can be applied in a real-time medical system trough an embedded device.
Modelling EHR timeseries by restricting feature interaction
Nov 14, 2019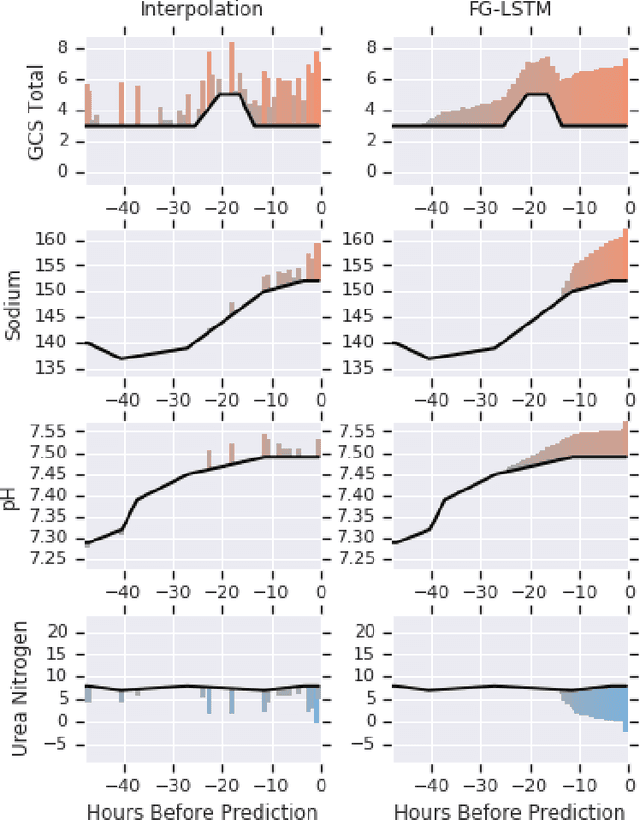
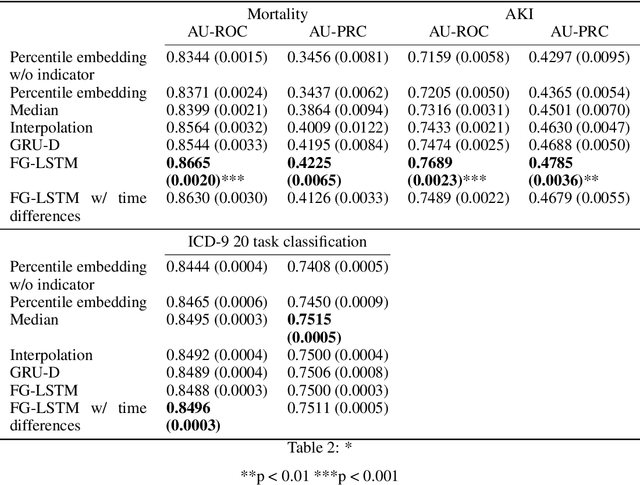
Time series data are prevalent in electronic health records, mostly in the form of physiological parameters such as vital signs and lab tests. The patterns of these values may be significant indicators of patients' clinical states and there might be patterns that are unknown to clinicians but are highly predictive of some outcomes. Many of these values are also missing which makes it difficult to apply existing methods like decision trees. We propose a recurrent neural network model that reduces overfitting to noisy observations by limiting interactions between features. We analyze its performance on mortality, ICD-9 and AKI prediction from observational values on the Medical Information Mart for Intensive Care III (MIMIC-III) dataset. Our models result in an improvement of 1.1% [p<0.01] in AU-ROC for mortality prediction under the MetaVision subset and 1.0% and 2.2% [p<0.01] respectively for mortality and AKI under the full MIMIC-III dataset compared to existing state-of-the-art interpolation, embedding and decay-based recurrent models.
Explaining an increase in predicted risk for clinical alerts
Jul 10, 2019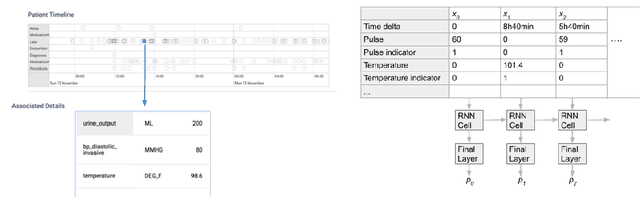
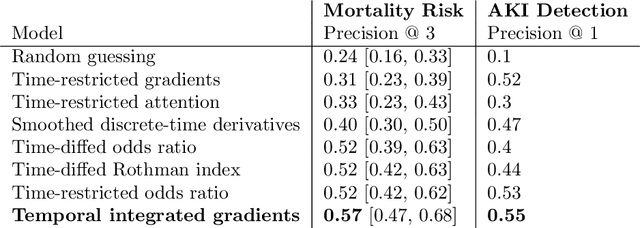

Much work aims to explain a model's prediction on a static input. We consider explanations in a temporal setting where a stateful dynamical model produces a sequence of risk estimates given an input at each time step. When the estimated risk increases, the goal of the explanation is to attribute the increase to a few relevant inputs from the past. While our formal setup and techniques are general, we carry out an in-depth case study in a clinical setting. The goal here is to alert a clinician when a patient's risk of deterioration rises. The clinician then has to decide whether to intervene and adjust the treatment. Given a potentially long sequence of new events since she last saw the patient, a concise explanation helps her to quickly triage the alert. We develop methods to lift static attribution techniques to the dynamical setting, where we identify and address challenges specific to dynamics. We then experimentally assess the utility of different explanations of clinical alerts through expert evaluation.
Graph Convolutional Transformer: Learning the Graphical Structure of Electronic Health Records
Jun 28, 2019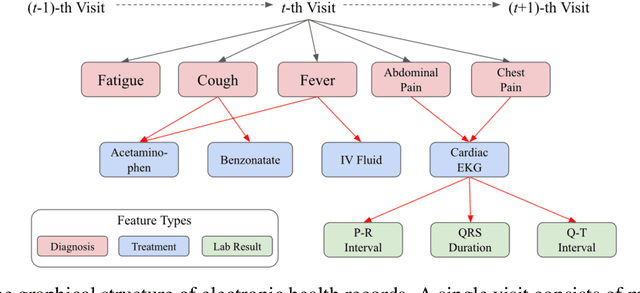
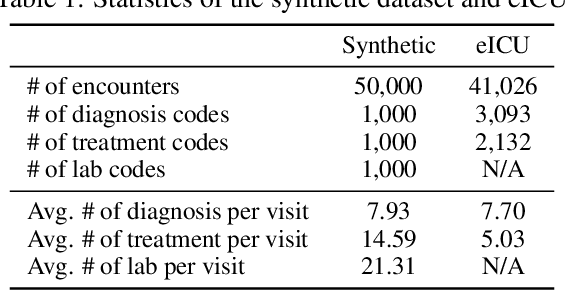
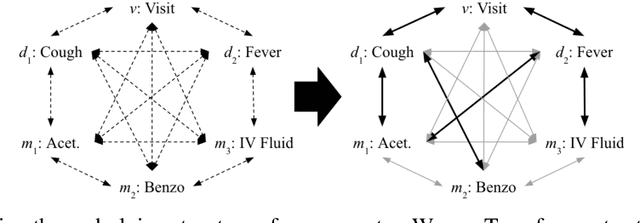
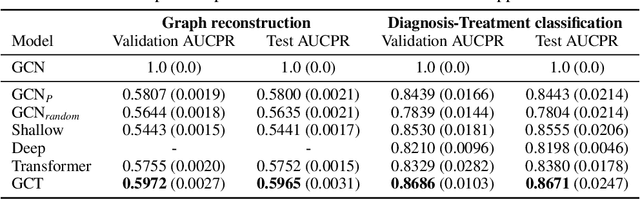
Effective modeling of electronic health records (EHR) is rapidly becoming an important topic in both academia and industry. A recent study showed that utilizing the graphical structure underlying EHR data (e.g. relationship between diagnoses and treatments) improves the performance of prediction tasks such as heart failure diagnosis prediction. However, EHR data do not always contain complete structure information. Moreover, when it comes to claims data, structure information is completely unavailable to begin with. Under such circumstances, can we still do better than just treating EHR data as a flat-structured bag-of-features? In this paper, we study the possibility of utilizing the implicit structure of EHR by using the Transformer for prediction tasks on EHR data. Specifically, we argue that the Transformer is a suitable model to learn the hidden EHR structure, and propose the Graph Convolutional Transformer, which uses data statistics to guide the structure learning process. Our model empirically demonstrated superior prediction performance to previous approaches on both synthetic data and publicly available EHR data on encounter-based prediction tasks such as graph reconstruction and readmission prediction, indicating that it can serve as an effective general-purpose representation learning algorithm for EHR data.
Depth map estimation methodology for detecting free-obstacle navigation areas
May 15, 2019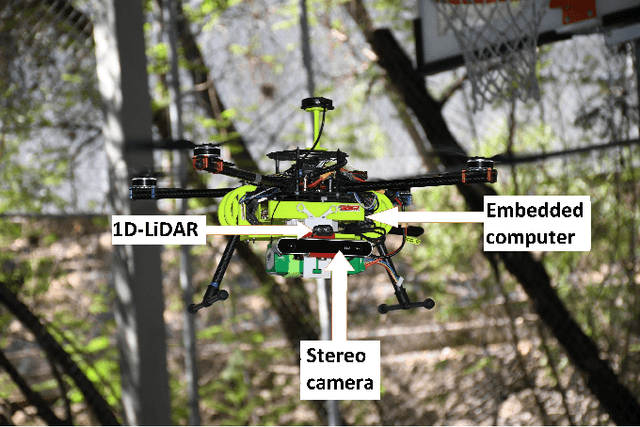
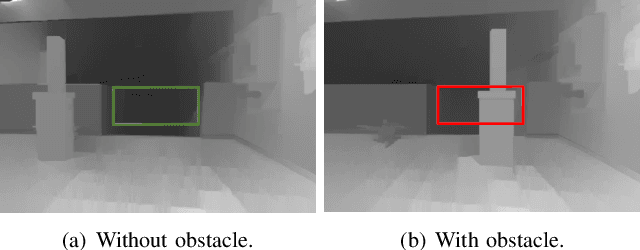
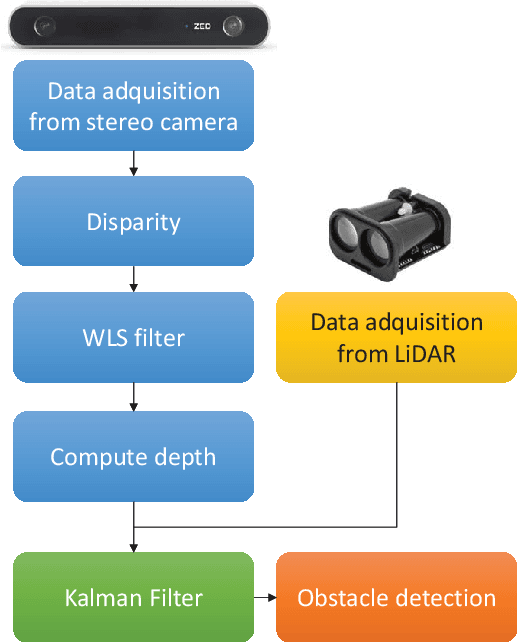
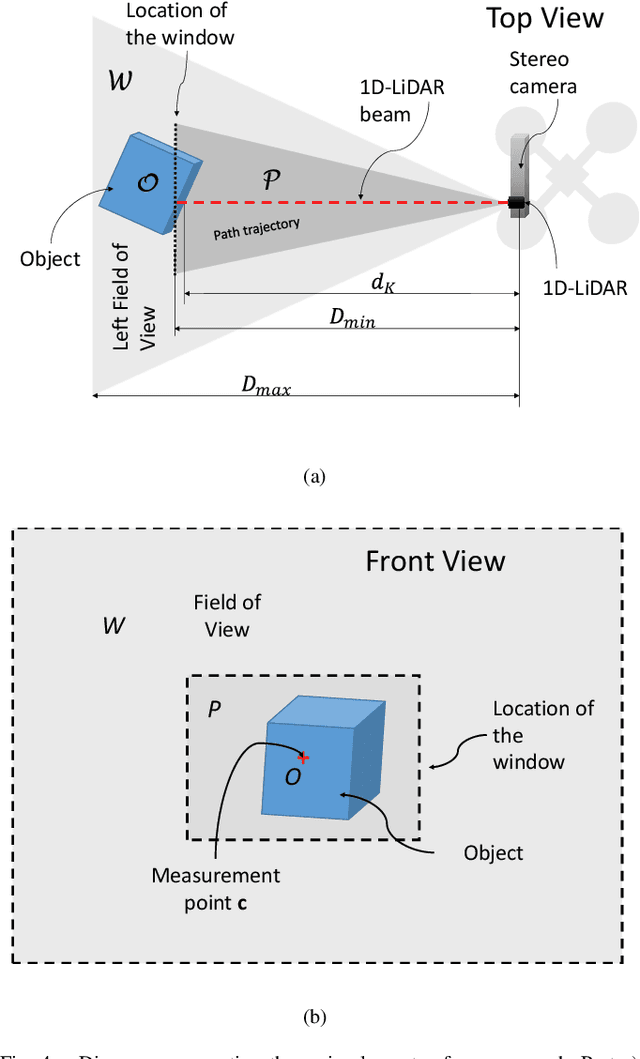
This paper presents a vision-based methodology which makes use of a stereo camera rig and a one dimension LiDAR to estimate free obstacle areas for quadrotor navigation. The presented approach fuses information provided by a depth map from a stereo camera rig, and the sensing distance of the 1D-LiDAR. Once the depth map is filtered with a Weighted Least Squares filter (WLS), the information is fused through a Kalman filter algorithm. To determine if there is a free space large enough for the quadrotor to pass through, our approach marks an area inside the disparity map by using the Kalman Filter output information. The whole process is implemented in an embedded computer Jetson TX2 and coded in the Robotic Operating System (ROS). Experiments demonstrate the effectiveness of our approach.
Object recognition and tracking using Haar-like Features Cascade Classifiers: Application to a quad-rotor UAV
Mar 10, 2019
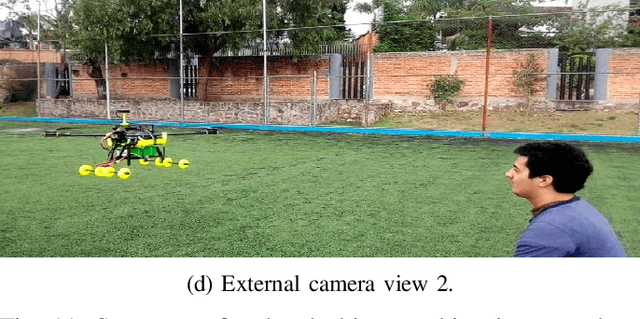
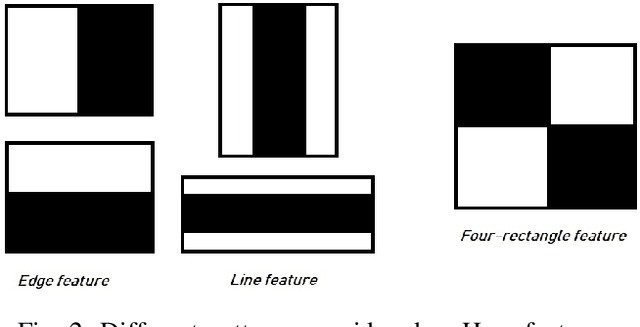
In this paper, we develop a functional Unmanned Aerial Vehicle (UAV), capable of tracking an object using a Machine Learning-like vision system called Haar feature-based cascade classifier. The image processing is made on-board with a high processor single-board computer. Based on the detected object and its position, the quadrotor must track it in order to be in a centered position and in a safe distance to it. The object in question is a human face; the experiments were conducted in a two-step detection, searching first for the upper-body and then searching for the face inside of the human body detected area. Once the human face is detected the quadrotor must follow it automatically. Experiments were conducted which shows the effectiveness of our mythology; these results are showing in a video.