 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecure Task Offloading and Resource Allocation Design for Multi-Layer Non-Terrestrial Networks
Feb 19, 2026Remote and resource-constrained Internet-of-Things (IoT) deployments often lack terrestrial connectivity for task offloading, motivating non-terrestrial networks (NTNs) with onboard multiaccess edge computing (MEC) capabilities. Nevertheless, in the presence of malicious actors, authentication needs to be performed to avoid non-authorized nodes from draining the computing resources of the NTN nodes. As a solution, we propose a four-layer MEC-enabled NTN with unmanned aerial vehicles (UAVs) acting as access nodes, a high altitude platform station (HAPS) acting as coordinator and authenticator, and a constellation of low-Earth orbit satellites (LEOSats) acting as remote MEC servers. We consider a tag-based physical-layer authentication (PLA) scheme to authenticate legitimate users, and formulate a joint task offloading decision and resource allocation for the admitted tasks, which is solved via block coordinate descent. Numerical results show that the PLA scheme is efficient and performs better than the benchmark schemes. We also demonstrate that the proposed scheme is robust against malicious attacks even under relaxed false-alarm constraints.
Transition control of a tail-sitter UAV using recurrent neural networks
Jun 29, 2020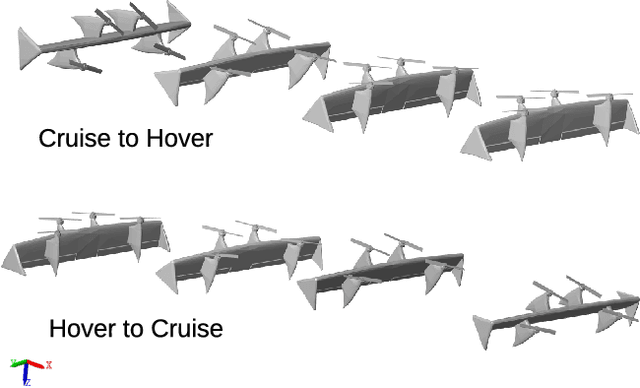
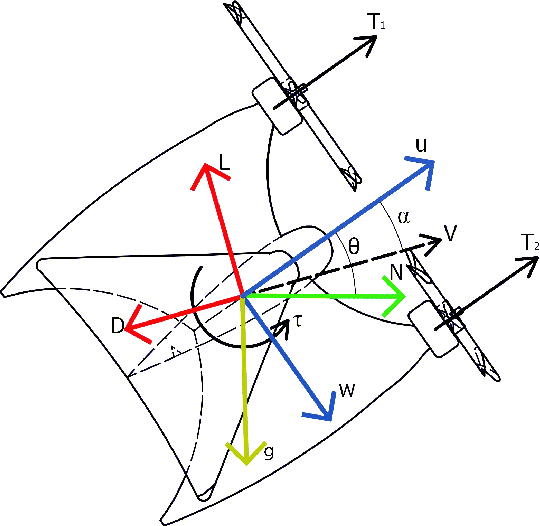
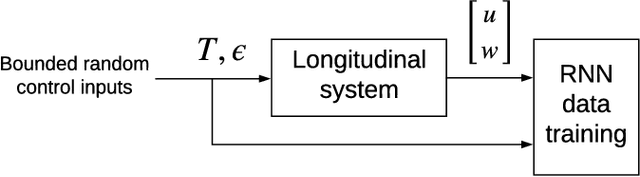
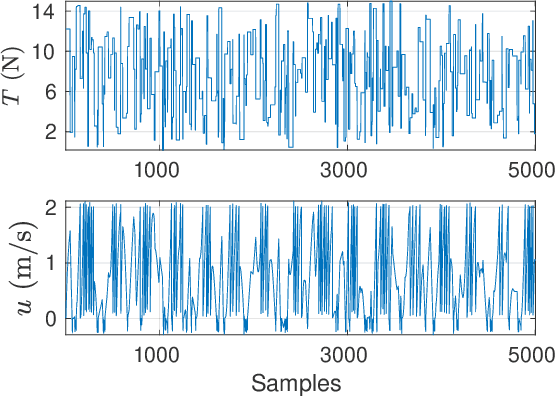
This paper presents the implementation of a Recurrent Neural Network (RNN) based-controller for the stabilization of the flight transition maneuver (hover-cruise and vice versa) of a tail-sitter UAV. The control strategy is based on attitude and velocity stabilization. For that aim, the RNN is used for the estimation of high nonlinear aerodynamic terms during the transition stage. Then, this estimate is used together with a feedback linearization technique for stabilizing the entire system. Results show convergence of linear velocities and the pitch angle during the transition maneuver. To analyze the performance of our proposed control strategy, we present simulations for the transition from hover to cruise and vice versa.