 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Genetic Approach to Gradient-Free Kinodynamic Planning in Uneven Terrains
Apr 17, 2025



This paper proposes a genetic algorithm-based kinodynamic planning algorithm (GAKD) for car-like vehicles navigating uneven terrains modeled as triangular meshes. The algorithm's distinct feature is trajectory optimization over a fixed-length receding horizon using a genetic algorithm with heuristic-based mutation, ensuring the vehicle's controls remain within its valid operational range. By addressing challenges posed by uneven terrain meshes, such as changing face normals, GAKD offers a practical solution for path planning in complex environments. Comparative evaluations against Model Predictive Path Integral (MPPI) and log-MPPI methods show that GAKD achieves up to 20 percent improvement in traversability cost while maintaining comparable path length. These results demonstrate GAKD's potential in improving vehicle navigation on challenging terrains.
Resilient Timed Elastic Band Planner for Collision-Free Navigation in Unknown Environments
Dec 04, 2024



In autonomous navigation, trajectory replanning, refinement, and control command generation are essential for effective motion planning. This paper presents a resilient approach to trajectory replanning addressing scenarios where the initial planner's solution becomes infeasible. The proposed method incorporates a hybrid A* algorithm to generate feasible trajectories when the primary planner fails and applies a soft constraints-based smoothing technique to refine these trajectories, ensuring continuity, obstacle avoidance, and kinematic feasibility. Obstacle constraints are modelled using a dynamic Voronoi map to improve navigation through narrow passages. This approach enhances the consistency of trajectory planning, speeds up convergence, and meets real-time computational requirements. In environments with around 30\% or higher obstacle density, the ratio of free space before and after placing new obstacles, the Resilient Timed Elastic Band (RTEB) planner achieves approximately 20\% reduction in traverse distance, traverse time, and control effort compared to the Timed Elastic Band (TEB) planner and Nonlinear Model Predictive Control (NMPC) planner. These improvements demonstrate the RTEB planner's potential for application in field robotics, particularly in agricultural and industrial environments, where navigating unstructured terrain is crucial for ensuring efficiency and operational resilience.
Residual Dynamics Learning for Trajectory Tracking for Multi-rotor Aerial Vehicles
May 25, 2023This paper presents a technique to cope with the gap between high-level planning, e.g., reference trajectory tracking, and low-level controlling using a learning-based method in the plan-based control paradigm. The technique improves the smoothness of maneuvering through cluttered environments, especially targeting low-speed velocity profiles. In such a profile, external aerodynamic effects that are applied on the quadrotor can be neglected. Hence, we used a simplified motion model to represent the motion of the quadrotor when formulating the Nonlinear Model Predictive Control (NMPC)-based local planner. However, the simplified motion model causes residual dynamics between the high-level planner and the low-level controller. The Sparse Gaussian Process Regression-based technique is proposed to reduce these residual dynamics. The proposed technique is compared with Data-Driven MPC. The comparison results yield that an augmented residual dynamics model-based planner helps to reduce the nominal model error by a factor of 2 on average. Further, we compared the proposed complete framework with four other approaches. The proposed approach outperformed the others in terms of tracking the reference trajectory without colliding with obstacles with less flight time without losing computational efficiency.
Optimization-based Motion Planning for Multirotor Aerial Vehicles: a Review
Aug 31, 2022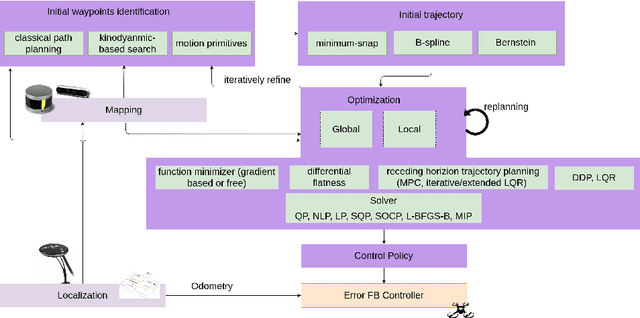
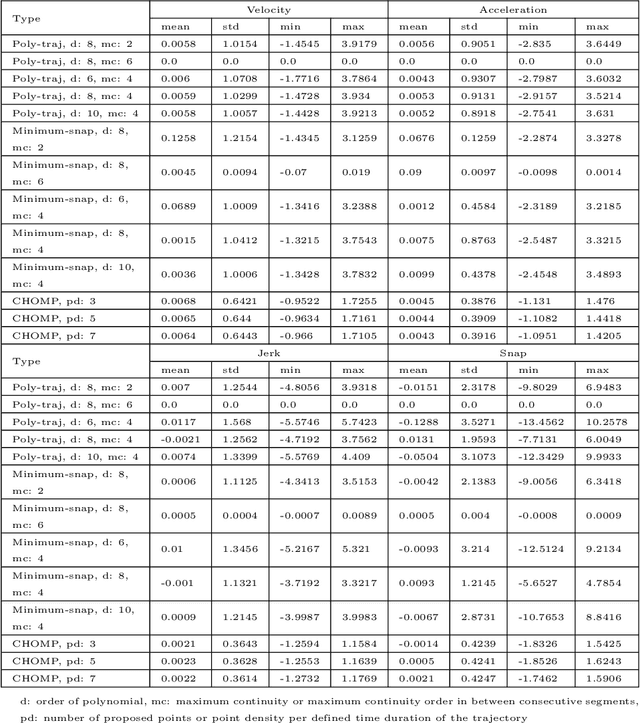
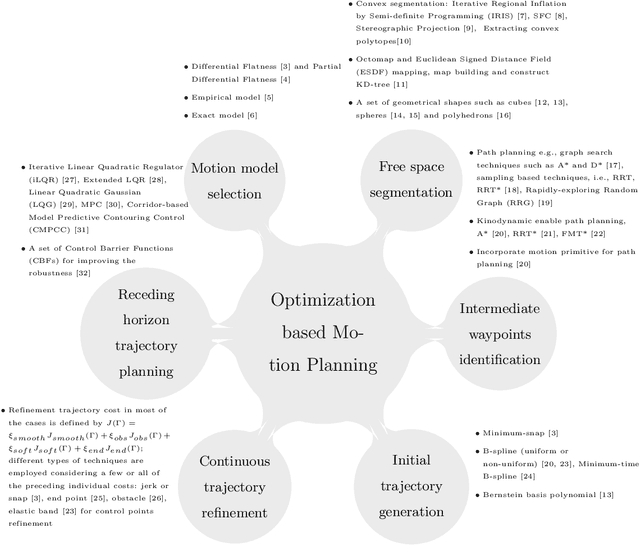
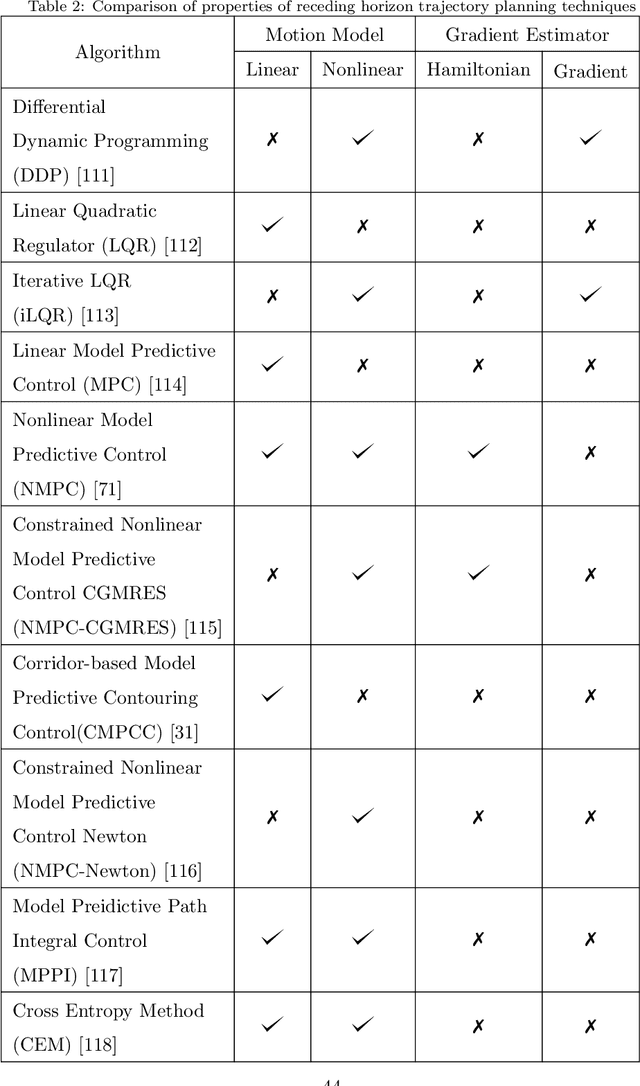
In general, optimal motion planning can be performed both as local and as global. In such a planning, the choice in favor of either local or global planning technique mainly depends on whether the environmental conditions are dynamic or static. Hence, the most adequate choice is to use local planning or local planning alongside global planning. When designing optimal motion planning both as local or as global, the key metrics to bear in mind are execution time, asymptotic optimality, quick reaction on dynamic obstacles. Such planning approaches can address the aforesaid target metrics more efficiently compared to other approaches such as path planning followed by smoothing. Thus, the foremost objective of this study is to analyse related literature in order to understand how the motion planning, specially trajectory planning, problem is formulated, when being applied for generating optimal trajectories in real-time for Multirotor Aerial Vehicles (MAVs), impact the listed metrics. As result of the research, trajectory planning problem was broken down into a set of subproblems, the lists of methods for addressing each of the problems were identified and described in detail. Subsequently, the most prominent results from 2010 to 2022 were summarized and presented in the form of a timeline.
Optimization-based Trajectory Tracking Approach for Multi-rotor Aerial Vehicles in Unknown Environments
Feb 12, 2022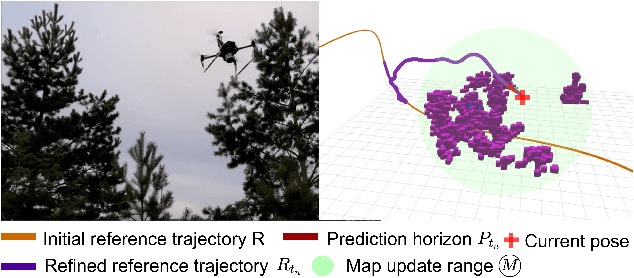
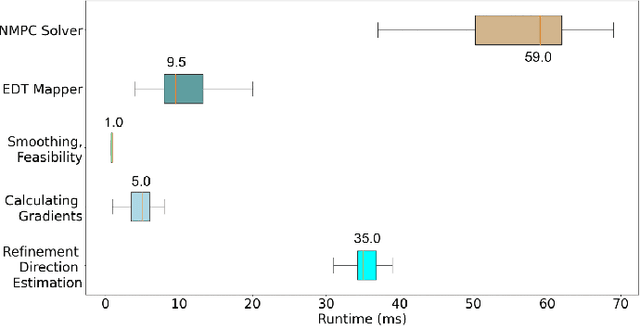
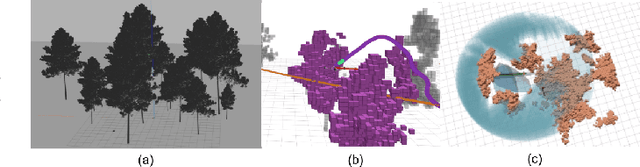
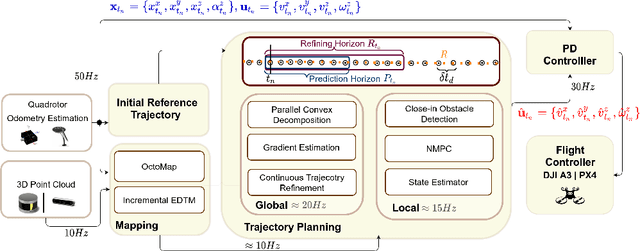
The goal of this paper is to develop a continuous optimization-based refinement of the reference trajectory to 'push it out' of the obstacle-occupied space in the global phase for Multi-rotor Aerial Vehicles in unknown environments. Our proposed approach comprises two planners: a global planner and a local planner. The global planner refines the initial reference trajectory when the trajectory goes either through an obstacle or near an obstacle and lets the local planner calculate a near-optimal control policy. The global planner comprises two convex programming approaches: the first one helps to refine the reference trajectory, and the second one helps to recover the reference trajectory if the first approach fails to refine. The global planner mainly focuses on real-time performance and obstacles avoidance, whereas the proposed formulation of the constrained nonlinear model predictive control-based local planner ensures safety, dynamic feasibility, and the reference trajectory tracking accuracy for low-speed maneuvers, provided that local and global planners have mean computation times 0.06s (15Hz) and 0.05s (20Hz), respectively, on an NVIDIA Jetson Xavier NX computer. The results of our experiment confirmed that, in cluttered environments, the proposed approach outperformed three other approaches: sampling-based pathfinding followed by trajectory generation, a local planner, and graph-based pathfinding followed by trajectory generation.
A Reinforcement Learning based Path Planning Approach in 3D Environment
May 21, 2021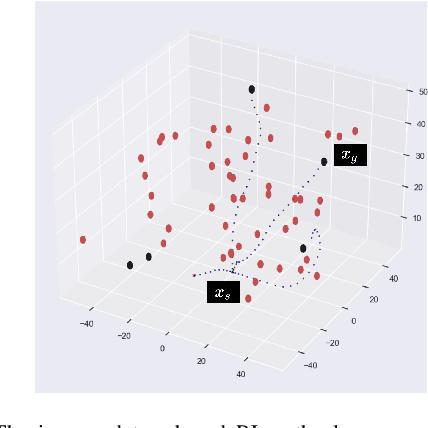
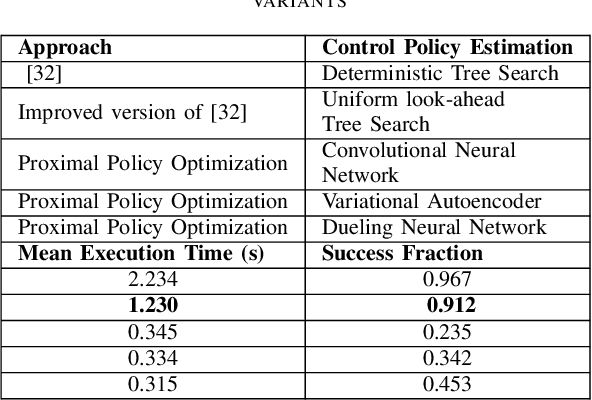
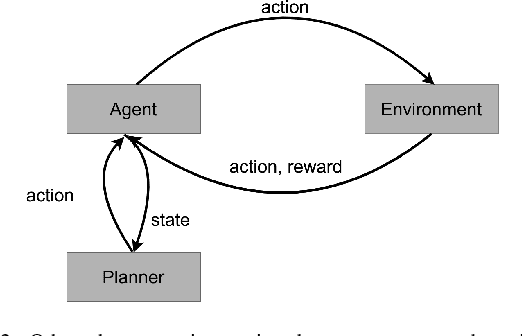
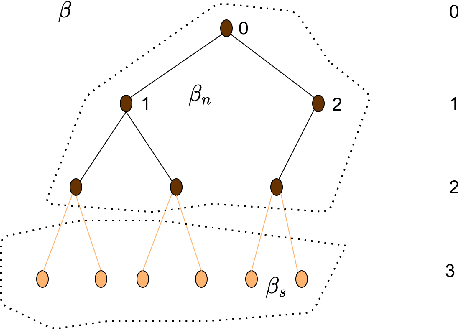
Optimal trajectory planning involves obstacles avoidance in which path planning is the key to success in optimal trajectory planning. Due to the computational demands, most of the path planning algorithms can not be employed for real-time based applications. Model-based Reinforcement Learning approaches for path planning got certain success in the recent past. Yet, most of such approaches do not have deterministic output due to the nature of those approaches. We analyzed several types of reinforcement learning-based approaches for path planning. One of them is a deterministic tree-based approach and the other two approaches are based on Q-learning and approximate policy gradient, respectively. We tested preceding approaches on two different type of simulators. Each of which consists of a set of random obstacles which could be changed or moved dynamically. After analysing the result and computation time, we concluded that the deterministic tree search approach provides a highly accurate result. However, the computational time is considerably higher than the other two approaches. Finally, the comparative results are provided in terms of accuracy and computational time as evidence.
Path Planning Followed by Kinodynamic Smoothing for Multirotor Aerial Vehicles (MAVs)
Aug 29, 2020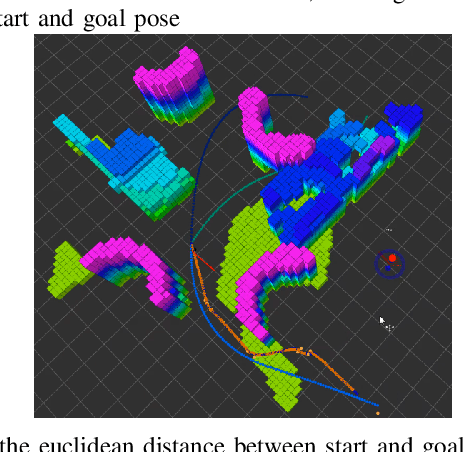
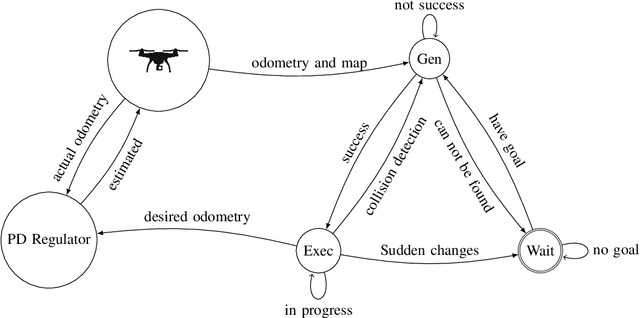
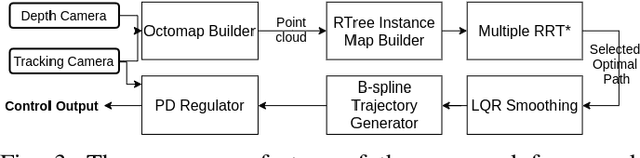
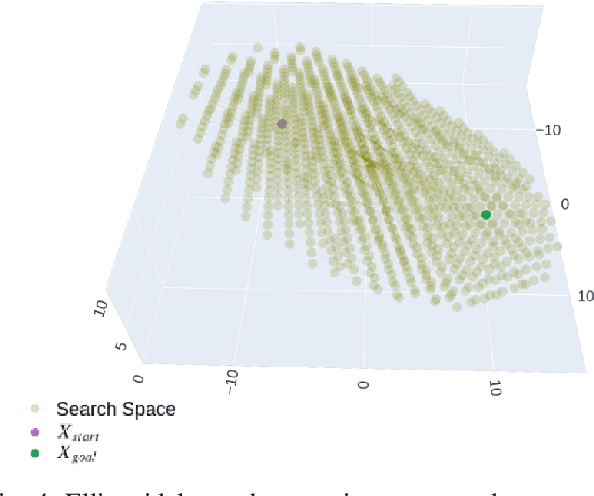
We explore path planning followed by kinodynamic smoothing while ensuring the vehicle dynamics feasibility for MAVs. We have chosen a geometrically based motion planning technique \textquotedblleft RRT*\textquotedblright\; for this purpose. In the proposed technique, we modified original RRT* introducing an adaptive search space and a steering function which help to increase the consistency of the planner. Moreover, we propose multiple RRT* which generates a set of desired paths, provided that the optimal path is selected among them. Then, apply kinodynamic smoothing, which will result in dynamically feasible as well as obstacle-free path. Thereafter, a b spline-based trajectory is generated to maneuver vehicle autonomously in unknown environments. Finally, we have tested the proposed technique in various simulated environments.
Real-Time Long Range Trajectory Replanning for UAVs in Presence of Dynamics Obstacles
Jan 10, 2020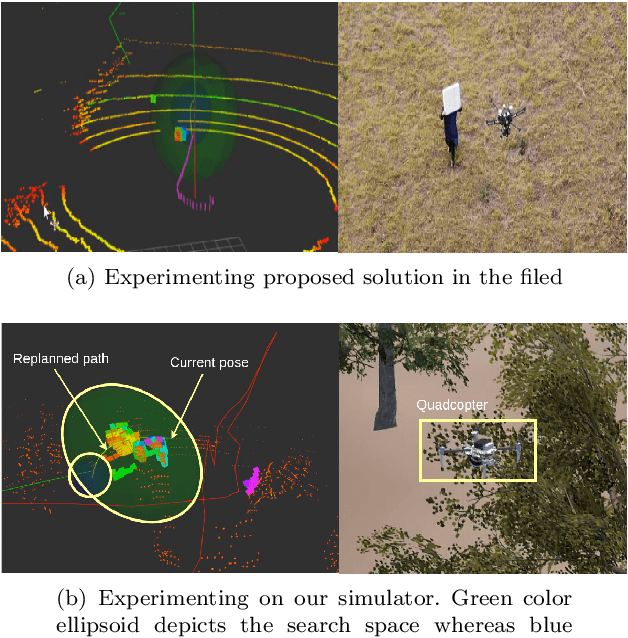
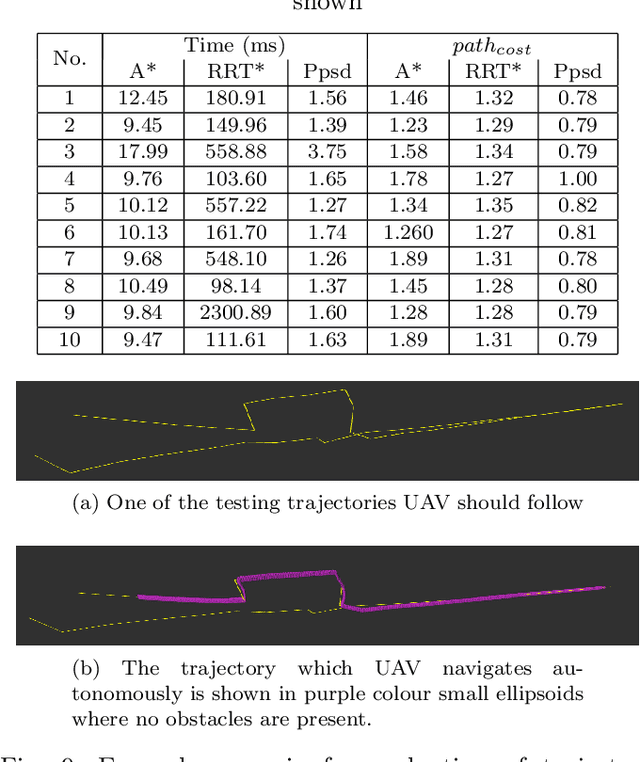
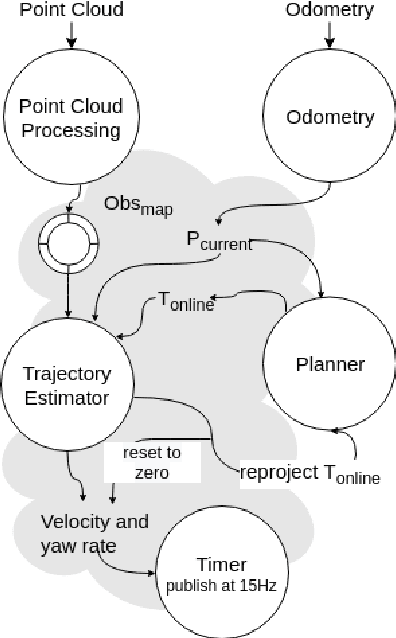
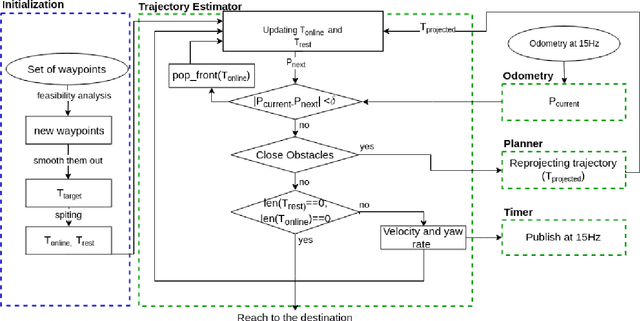
Real-time long-range local planning is a challenging task, especially in the presence of dynamics obstacles. We propose a complete system which is capable of performing the local replanning in real-time. It requires to provide the desired trajectory to be followed in the system initialization phase. Subsequently, it starts initializing sub-components of the system including point cloud processor, trajectory estimator and planner. Afterwards, the multi-rotary aerial vehicle starts moving on the given trajectory. When it detects obstacles, it replans the trajectory from the current pose to pre-defined distance incorporating the desired trajectory. Point cloud processor is employed to identify the closest obstacles around the vehicle. For replanning, Rapidly-exploring Random Trees (RRT*) is used with two modifications which allow planning the trajectory in milliseconds scales. Once we replanned trajectory, velocity components(x,y and z) and yaw rate are calculated. Those values are sent to the controller at a constant frequency to navigate the vehicle autonomously. Finally, we have evaluated each of the components separately and tested the complete system in the simulated and real environment.