 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey of Qualitative Spatial and Temporal Calculi -- Algebraic and Computational Properties
Jun 01, 2016
Qualitative Spatial and Temporal Reasoning (QSTR) is concerned with symbolic knowledge representation, typically over infinite domains. The motivations for employing QSTR techniques range from exploiting computational properties that allow efficient reasoning to capture human cognitive concepts in a computational framework. The notion of a qualitative calculus is one of the most prominent QSTR formalisms. This article presents the first overview of all qualitative calculi developed to date and their computational properties, together with generalized definitions of the fundamental concepts and methods, which now encompass all existing calculi. Moreover, we provide a classification of calculi according to their algebraic properties.
Algebraic Properties of Qualitative Spatio-Temporal Calculi
Sep 13, 2013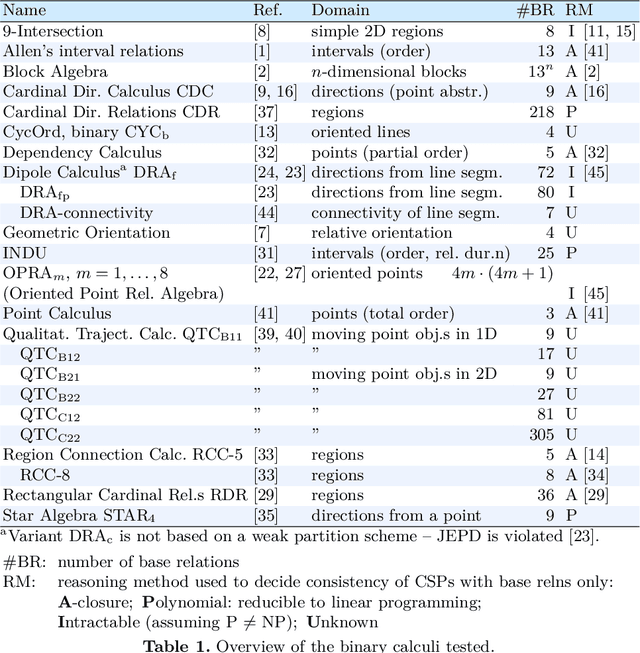
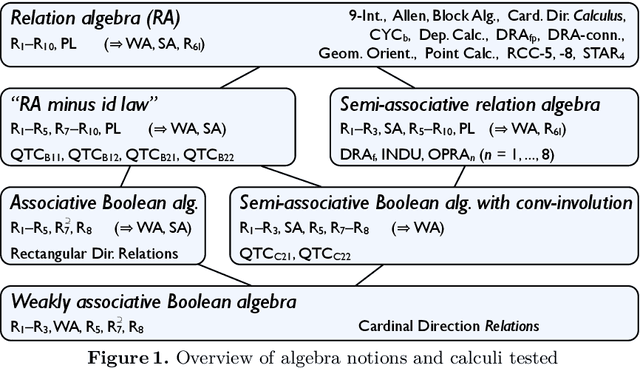
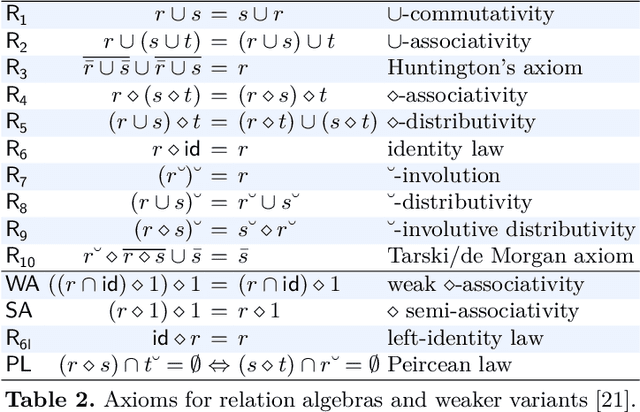
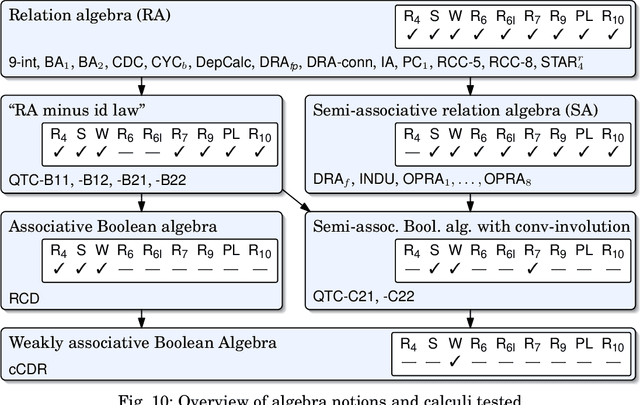
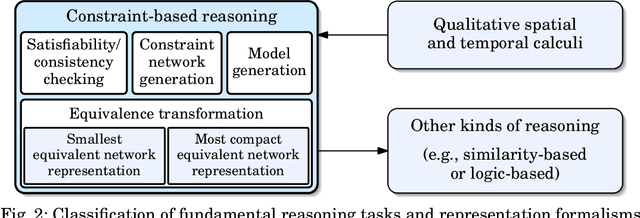
Qualitative spatial and temporal reasoning is based on so-called qualitative calculi. Algebraic properties of these calculi have several implications on reasoning algorithms. But what exactly is a qualitative calculus? And to which extent do the qualitative calculi proposed meet these demands? The literature provides various answers to the first question but only few facts about the second. In this paper we identify the minimal requirements to binary spatio-temporal calculi and we discuss the relevance of the according axioms for representation and reasoning. We also analyze existing qualitative calculi and provide a classification involving different notions of a relation algebra.
h-approximation: History-Based Approximation of Possible World Semantics as ASP
Jun 14, 2013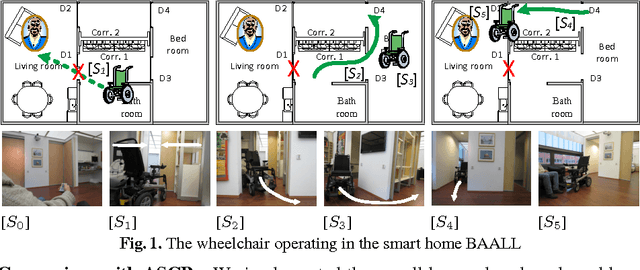
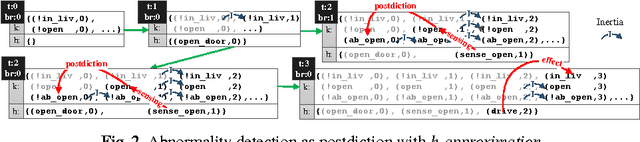
We propose an approximation of the Possible Worlds Semantics (PWS) for action planning. A corresponding planning system is implemented by a transformation of the action specification to an Answer-Set Program. A novelty is support for postdiction wrt. (a) the plan existence problem in our framework can be solved in NP, as compared to $\Sigma_2^P$ for non-approximated PWS of Baral(2000); and (b) the planner generates optimal plans wrt. a minimal number of actions in $\Delta_2^P$. We demo the planning system with standard problems, and illustrate its integration in a larger software framework for robot control in a smart home.