 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping and Scheduling Spiking Neural Networks On Segmented Ladder Bus Architectures
Jun 12, 2025Large-scale neuromorphic architectures consist of computing tiles that communicate spikes using a shared interconnect. The communication patterns in these systems are inherently sparse, asynchronous, and localized, as neural activity is characterized by temporal sparsity with occasional bursts of high traffic. These characteristics require optimized interconnects to handle high-activity bursts while consuming minimal power during idle periods. Among the proposed interconnect solutions, the dynamic segmented bus has gained attention due to its structural simplicity, scalability, and energy efficiency. Since the benefits of a dynamic segmented bus stem from its simplicity, it is essential to develop a streamlined control plane that can scale efficiently with the network. In this paper, we present a design methodology for a scenario-aware control plane tailored to a segmented ladder bus, with the aim of minimizing control overhead and optimizing energy and area utilization. We evaluated our approach using a combination of FPGA implementation and software simulation to assess scalability. The results demonstrated that our design process effectively reduces the control plane's area footprint compared to the data plane while maintaining scalability with network size.
Futureproof Static Memory Planning
Apr 07, 2025



The NP-complete combinatorial optimization task of assigning offsets to a set of buffers with known sizes and lifetimes so as to minimize total memory usage is called dynamic storage allocation (DSA). Existing DSA implementations bypass the theoretical state-of-the-art algorithms in favor of either fast but wasteful heuristics, or memory-efficient approaches that do not scale beyond one thousand buffers. The "AI memory wall", combined with deep neural networks' static architecture, has reignited interest in DSA. We present idealloc, a low-fragmentation, high-performance DSA implementation designed for million-buffer instances. Evaluated on a novel suite of particularly hard benchmarks from several domains, idealloc ranks first against four production implementations in terms of a joint effectiveness/robustness criterion.
SAfEPaTh: A System-Level Approach for Efficient Power and Thermal Estimation of Convolutional Neural Network Accelerator
Jul 24, 2024The design of energy-efficient, high-performance, and reliable Convolutional Neural Network (CNN) accelerators involves significant challenges due to complex power and thermal management issues. This paper introduces SAfEPaTh, a novel system-level approach for accurately estimating power and temperature in tile-based CNN accelerators. By addressing both steady-state and transient-state scenarios, SAfEPaTh effectively captures the dynamic effects of pipeline bubbles in interlayer pipelines, utilizing real CNN workloads for comprehensive evaluation. Unlike traditional methods, it eliminates the need for circuit-level simulations or on-chip measurements. Our methodology leverages TANIA, a cutting-edge hybrid digital-analog tile-based accelerator featuring analog-in-memory computing cores alongside digital cores. Through rigorous simulation results using the ResNet18 model, we demonstrate SAfEPaTh's capability to accurately estimate power and temperature within 500 seconds, encompassing CNN model accelerator mapping exploration and detailed power and thermal estimations. This efficiency and accuracy make SAfEPaTh an invaluable tool for designers, enabling them to optimize performance while adhering to stringent power and thermal constraints. Furthermore, SAfEPaTh's adaptability extends its utility across various CNN models and accelerator architectures, underscoring its broad applicability in the field. This study contributes significantly to the advancement of energy-efficient and reliable CNN accelerator designs, addressing critical challenges in dynamic power and thermal management.
Active Inference in Hebbian Learning Networks
Jun 22, 2023



This work studies how brain-inspired neural ensembles equipped with local Hebbian plasticity can perform active inference (AIF) in order to control dynamical agents. A generative model capturing the environment dynamics is learned by a network composed of two distinct Hebbian ensembles: a posterior network, which infers latent states given the observations, and a state transition network, which predicts the next expected latent state given current state-action pairs. Experimental studies are conducted using the Mountain Car environment from the OpenAI gym suite, to study the effect of the various Hebbian network parameters on the task performance. It is shown that the proposed Hebbian AIF approach outperforms the use of Q-learning, while not requiring any replay buffer, as in typical reinforcement learning systems. These results motivate further investigations of Hebbian learning for the design of AIF networks that can learn environment dynamics without the need for revisiting past buffered experiences.
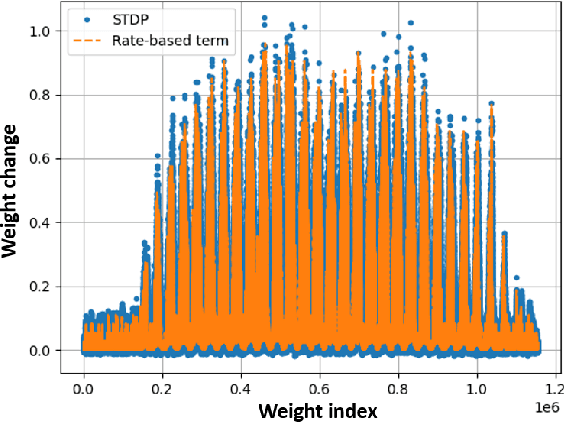
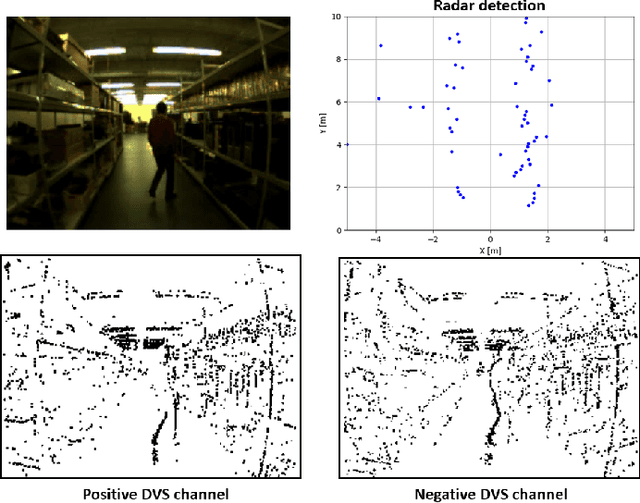
Fusing Event-based Camera and Radar for SLAM Using Spiking Neural Networks with Continual STDP Learning
Oct 09, 2022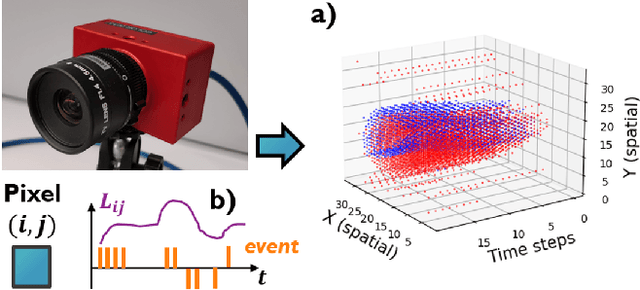
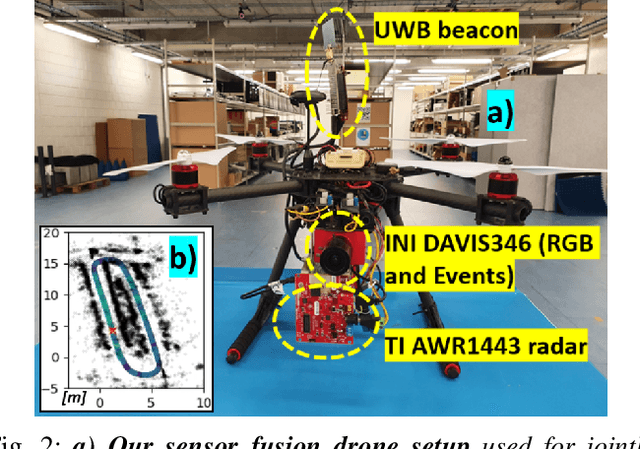
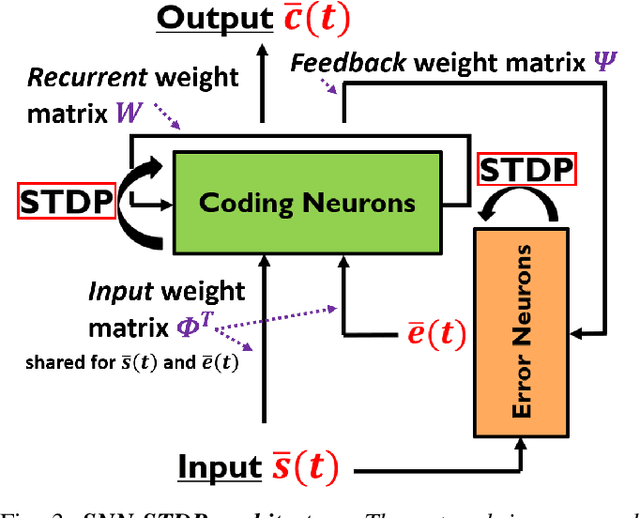
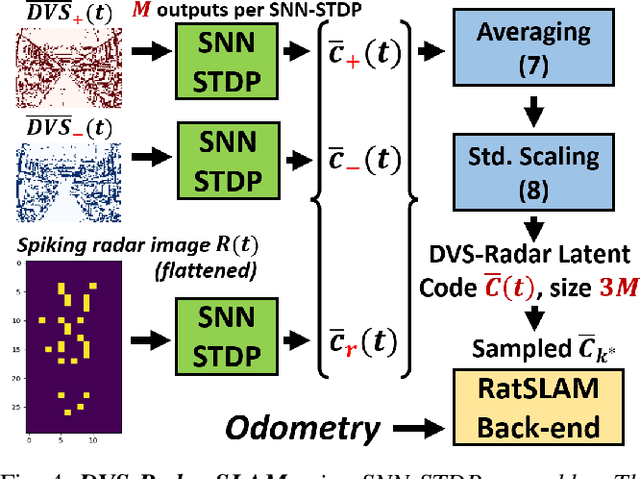
This work proposes a first-of-its-kind SLAM architecture fusing an event-based camera and a Frequency Modulated Continuous Wave (FMCW) radar for drone navigation. Each sensor is processed by a bio-inspired Spiking Neural Network (SNN) with continual Spike-Timing-Dependent Plasticity (STDP) learning, as observed in the brain. In contrast to most learning-based SLAM systems%, which a) require the acquisition of a representative dataset of the environment in which navigation must be performed and b) require an off-line training phase, our method does not require any offline training phase, but rather the SNN continuously learns features from the input data on the fly via STDP. At the same time, the SNN outputs are used as feature descriptors for loop closure detection and map correction. We conduct numerous experiments to benchmark our system against state-of-the-art RGB methods and we demonstrate the robustness of our DVS-Radar SLAM approach under strong lighting variations.
Learning to SLAM on the Fly in Unknown Environments: A Continual Learning Approach for Drones in Visually Ambiguous Scenes
Aug 27, 2022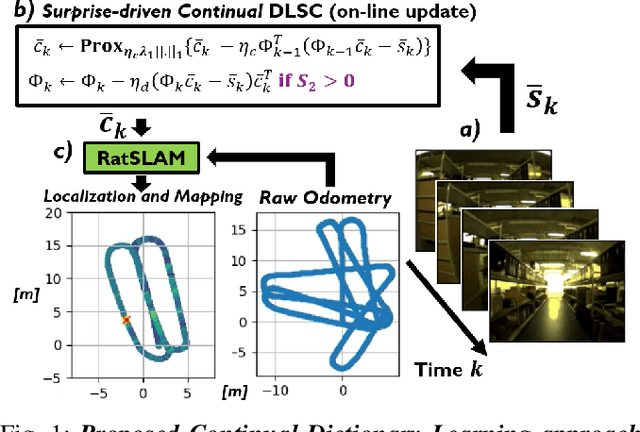
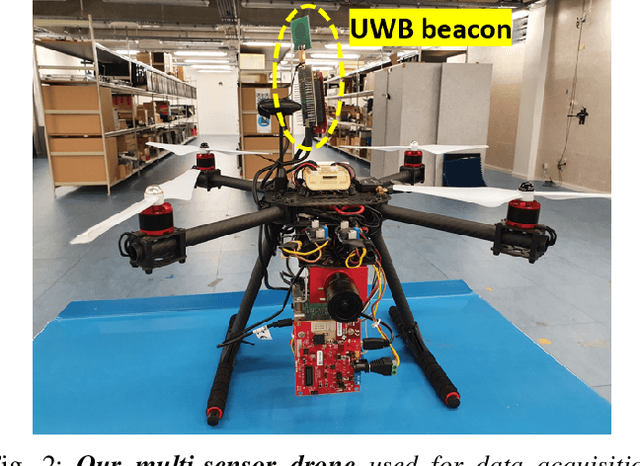
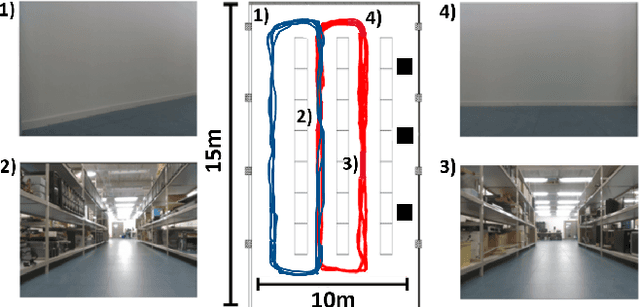
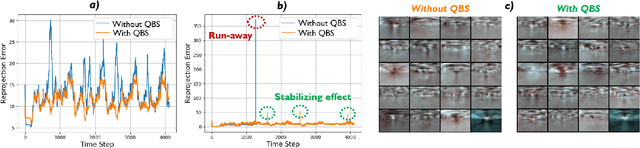
Learning to safely navigate in unknown environments is an important task for autonomous drones used in surveillance and rescue operations. In recent years, a number of learning-based Simultaneous Localisation and Mapping (SLAM) systems relying on deep neural networks (DNNs) have been proposed for applications where conventional feature descriptors do not perform well. However, such learning-based SLAM systems rely on DNN feature encoders trained offline in typical deep learning settings. This makes them less suited for drones deployed in environments unseen during training, where continual adaptation is paramount. In this paper, we present a new method for learning to SLAM on the fly in unknown environments, by modulating a low-complexity Dictionary Learning and Sparse Coding (DLSC) pipeline with a newly proposed Quadratic Bayesian Surprise (QBS) factor. We experimentally validate our approach with data collected by a drone in a challenging warehouse scenario, where the high number of ambiguous scenes makes visual disambiguation hard.
Continuously Learning to Detect People on the Fly: A Bio-inspired Visual System for Drones
Feb 20, 2022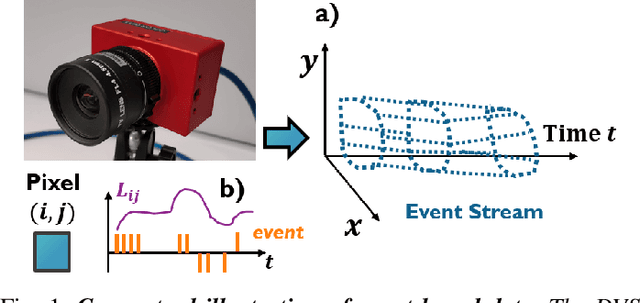
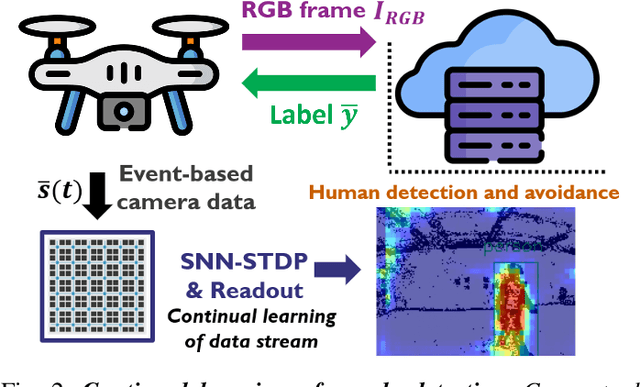
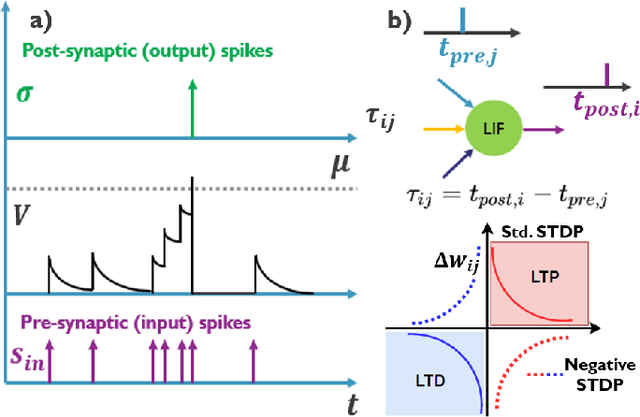
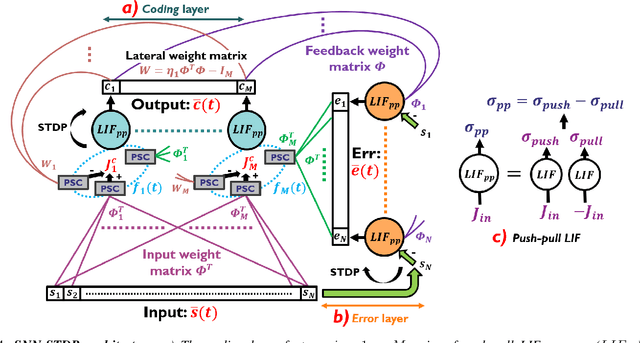
This paper demonstrates for the first time that a biologically-plausible spiking neural network (SNN) equipped with Spike-Timing-Dependent Plasticity (STDP) can continuously learn to detect walking people on the fly using retina-inspired, event-based cameras. Our pipeline works as follows. First, a short sequence of event data ($<2$ minutes), capturing a walking human by a flying drone, is forwarded to a convolutional SNNSTDP system which also receives teacher spiking signals from a readout (forming a semi-supervised system). Then, STDP adaptation is stopped and the learned system is assessed on testing sequences. We conduct several experiments to study the effect of key parameters in our system and to compare it against conventionally-trained CNNs. We show that our system reaches a higher peak $F_1$ score (+19%) compared to CNNs with event-based camera frames, while enabling on-line adaptation.
Design of Many-Core Big Little μBrain for Energy-Efficient Embedded Neuromorphic Computing
Nov 23, 2021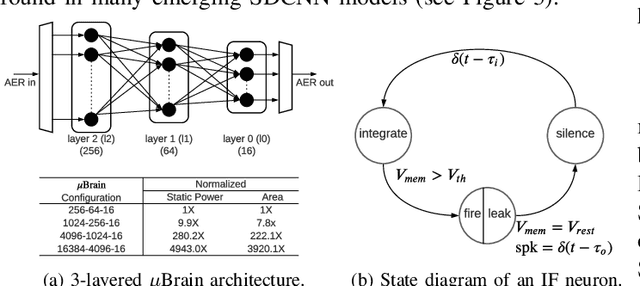
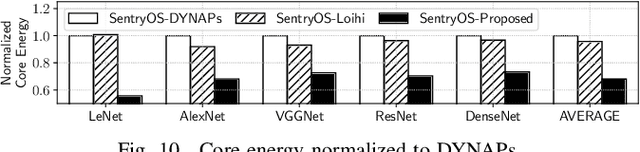
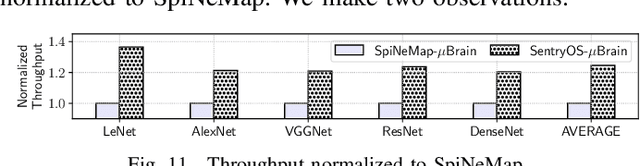
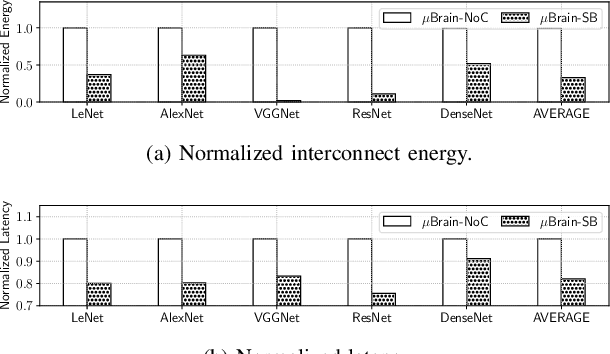
As spiking-based deep learning inference applications are increasing in embedded systems, these systems tend to integrate neuromorphic accelerators such as $\mu$Brain to improve energy efficiency. We propose a $\mu$Brain-based scalable many-core neuromorphic hardware design to accelerate the computations of spiking deep convolutional neural networks (SDCNNs). To increase energy efficiency, cores are designed to be heterogeneous in terms of their neuron and synapse capacity (big cores have higher capacity than the little ones), and they are interconnected using a parallel segmented bus interconnect, which leads to lower latency and energy compared to a traditional mesh-based Network-on-Chip (NoC). We propose a system software framework called SentryOS to map SDCNN inference applications to the proposed design. SentryOS consists of a compiler and a run-time manager. The compiler compiles an SDCNN application into subnetworks by exploiting the internal architecture of big and little $\mu$Brain cores. The run-time manager schedules these sub-networks onto cores and pipeline their execution to improve throughput. We evaluate the proposed big little many-core neuromorphic design and the system software framework with five commonlyused SDCNN inference applications and show that the proposed solution reduces energy (between 37% and 98%), reduces latency (between 9% and 25%), and increases application throughput (between 20% and 36%). We also show that SentryOS can be easily extended for other spiking neuromorphic accelerators.
Learning Event-based Spatio-Temporal Feature Descriptors via Local Synaptic Plasticity: A Biologically-realistic Perspective of Computer Vision
Nov 04, 2021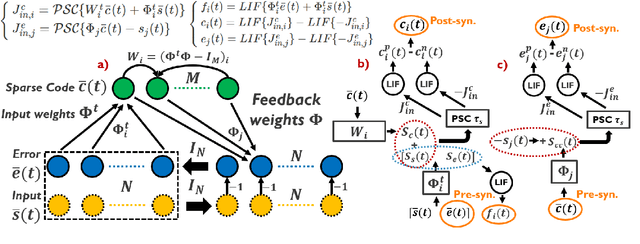


We present an optimization-based theory describing spiking cortical ensembles equipped with Spike-Timing-Dependent Plasticity (STDP) learning, as empirically observed in the visual cortex. Using our methods, we build a class of fully-connected, convolutional and action-based feature descriptors for event-based camera that we respectively assess on N-MNIST, challenging CIFAR10-DVS and on the IBM DVS128 gesture dataset. We report significant accuracy improvements compared to conventional state-of-the-art event-based feature descriptors (+8% on CIFAR10-DVS). We report large improvements in accuracy compared to state-of-the-art STDP-based systems (+10% on N-MNIST, +7.74% on IBM DVS128 Gesture). In addition to ultra-low-power learning in neuromorphic edge devices, our work helps paving the way towards a biologically-realistic, optimization-based theory of cortical vision.
Fail-Safe Human Detection for Drones Using a Multi-Modal Curriculum Learning Approach
Sep 28, 2021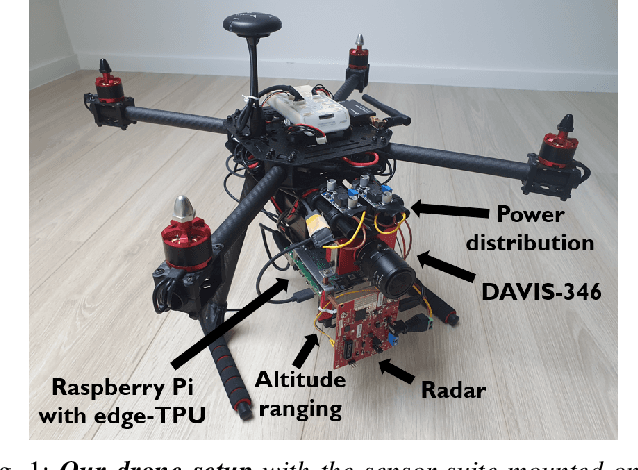
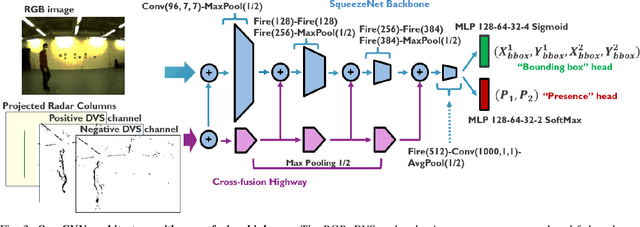
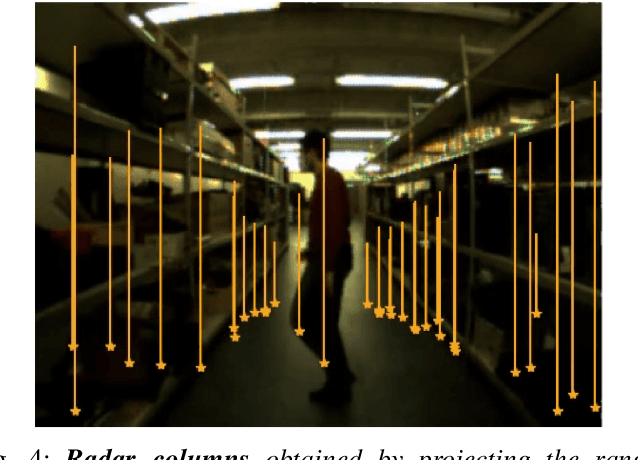
Drones are currently being explored for safety-critical applications where human agents are expected to evolve in their vicinity. In such applications, robust people avoidance must be provided by fusing a number of sensing modalities in order to avoid collisions. Currently however, people detection systems used on drones are solely based on standard cameras besides an emerging number of works discussing the fusion of imaging and event-based cameras. On the other hand, radar-based systems provide up-most robustness towards environmental conditions but do not provide complete information on their own and have mainly been investigated in automotive contexts, not for drones. In order to enable the fusion of radars with both event-based and standard cameras, we present KUL-UAVSAFE, a first-of-its-kind dataset for the study of safety-critical people detection by drones. In addition, we propose a baseline CNN architecture with cross-fusion highways and introduce a curriculum learning strategy for multi-modal data termed SAUL, which greatly enhances the robustness of the system towards hard RGB failures and provides a significant gain of 15% in peak F1 score compared to the use of BlackIn, previously proposed for cross-fusion networks. We demonstrate the real-time performance and feasibility of the approach by implementing the system in an edge-computing unit. We release our dataset and additional material in the project home page.