 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping and Scheduling Spiking Neural Networks On Segmented Ladder Bus Architectures
Jun 12, 2025Large-scale neuromorphic architectures consist of computing tiles that communicate spikes using a shared interconnect. The communication patterns in these systems are inherently sparse, asynchronous, and localized, as neural activity is characterized by temporal sparsity with occasional bursts of high traffic. These characteristics require optimized interconnects to handle high-activity bursts while consuming minimal power during idle periods. Among the proposed interconnect solutions, the dynamic segmented bus has gained attention due to its structural simplicity, scalability, and energy efficiency. Since the benefits of a dynamic segmented bus stem from its simplicity, it is essential to develop a streamlined control plane that can scale efficiently with the network. In this paper, we present a design methodology for a scenario-aware control plane tailored to a segmented ladder bus, with the aim of minimizing control overhead and optimizing energy and area utilization. We evaluated our approach using a combination of FPGA implementation and software simulation to assess scalability. The results demonstrated that our design process effectively reduces the control plane's area footprint compared to the data plane while maintaining scalability with network size.
Implementing Spiking Neural Networks on Neuromorphic Architectures: A Review
Feb 17, 2022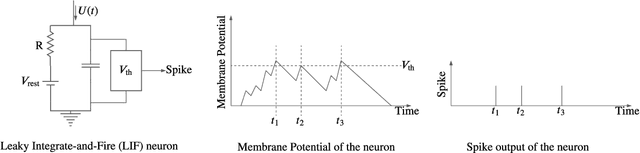
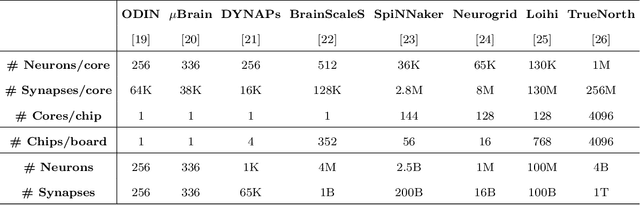
Recently, both industry and academia have proposed several different neuromorphic systems to execute machine learning applications that are designed using Spiking Neural Networks (SNNs). With the growing complexity on design and technology fronts, programming such systems to admit and execute a machine learning application is becoming increasingly challenging. Additionally, neuromorphic systems are required to guarantee real-time performance, consume lower energy, and provide tolerance to logic and memory failures. Consequently, there is a clear need for system software frameworks that can implement machine learning applications on current and emerging neuromorphic systems, and simultaneously address performance, energy, and reliability. Here, we provide a comprehensive overview of such frameworks proposed for both, platform-based design and hardware-software co-design. We highlight challenges and opportunities that the future holds in the area of system software technology for neuromorphic computing.