 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMapping Embodied Affective Touch Strategies on a Humanoid Robot
May 12, 2026Affective touch in human-robot interaction is shaped not only by emotional intent, but also by robot embodiment, including touch location, physical constraints, and perceived agency or social role. Existing HRI studies typically focus on one or two isolated body parts, limiting understanding of how affective touch generalises across the full humanoid body. We present a study with 32 participants interacting with the iCub robot, which is equipped with full-body distributed tactile sensors. Participants expressed eight emotions under three conditions: free touch, arm-only touch, and torso-only touch. Results show that body region and spatial constraints jointly shaped both touch location and dynamics. In free touch, participants preferred socially accessible upper-body regions, while less frequently touched areas showed stronger emotion-specific selectivity. Emotion-related variation was more evident in motion features for arm-only touch and pressure features for torso-only touch. Touch strategies also did not transfer directly between free and constrained conditions, even within the same coarse body region. Participants reported increased closeness to the robot after interaction, with around 30 percent reporting a change in perceived social relationship. Together, these findings show that affective touch expression is strongly body-region dependent and shaped by embodiment constraints.
Artists' Views on Robotics Involvement in Painting Productions
Oct 08, 2025



As robotic technologies evolve, their potential in artistic creation becomes an increasingly relevant topic of inquiry. This study explores how professional abstract artists perceive and experience co-creative interactions with an autonomous painting robotic arm. Eight artists engaged in six painting sessions -- three with a human partner, followed by three with the robot -- and subsequently participated in semi-structured interviews analyzed through reflexive thematic analysis. Human-human interactions were described as intuitive, dialogic, and emotionally engaging, whereas human-robot sessions felt more playful and reflective, offering greater autonomy and prompting for novel strategies to overcome the system's limitations. This work offers one of the first empirical investigations into artists' lived experiences with a robot, highlighting the value of long-term engagement and a multidisciplinary approach to human-robot co-creation.
Next-Gen Museum Guides: Autonomous Navigation and Visitor Interaction with an Agentic Robot
Jul 16, 2025



Autonomous robots are increasingly being tested into public spaces to enhance user experiences, particularly in cultural and educational settings. This paper presents the design, implementation, and evaluation of the autonomous museum guide robot Alter-Ego equipped with advanced navigation and interactive capabilities. The robot leverages state-of-the-art Large Language Models (LLMs) to provide real-time, context aware question-and-answer (Q&A) interactions, allowing visitors to engage in conversations about exhibits. It also employs robust simultaneous localization and mapping (SLAM) techniques, enabling seamless navigation through museum spaces and route adaptation based on user requests. The system was tested in a real museum environment with 34 participants, combining qualitative analysis of visitor-robot conversations and quantitative analysis of pre and post interaction surveys. Results showed that the robot was generally well-received and contributed to an engaging museum experience, despite some limitations in comprehension and responsiveness. This study sheds light on HRI in cultural spaces, highlighting not only the potential of AI-driven robotics to support accessibility and knowledge acquisition, but also the current limitations and challenges of deploying such technologies in complex, real-world environments.
"iCub, We Forgive You!" Investigating Trust in a Game Scenario with Kids
Sep 04, 2022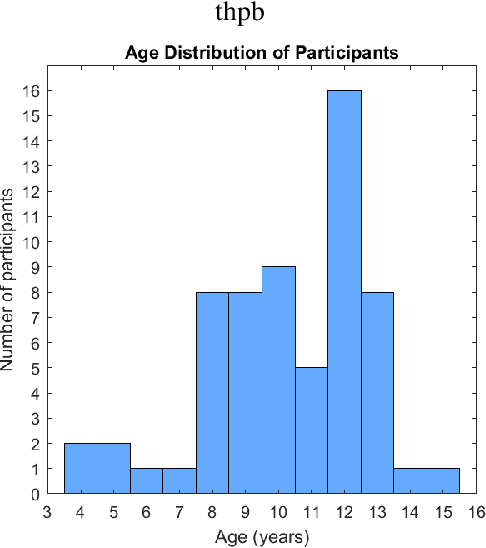
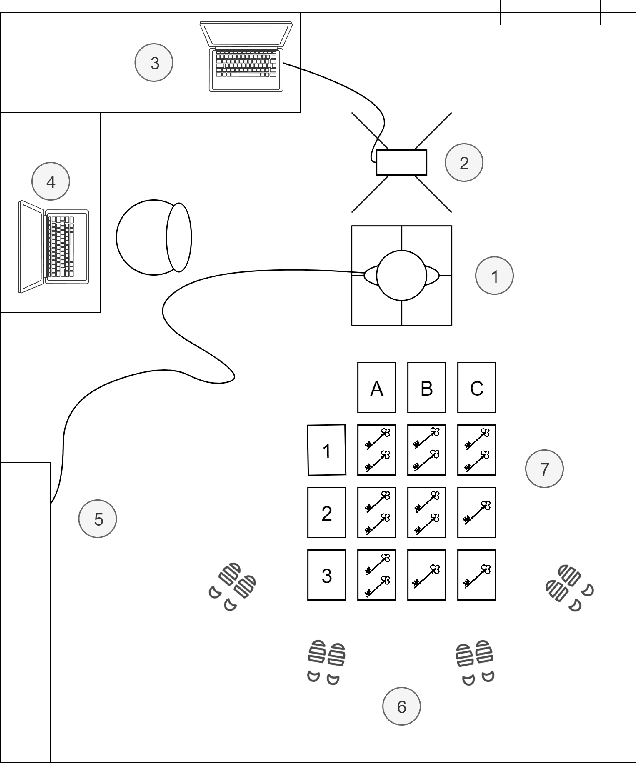
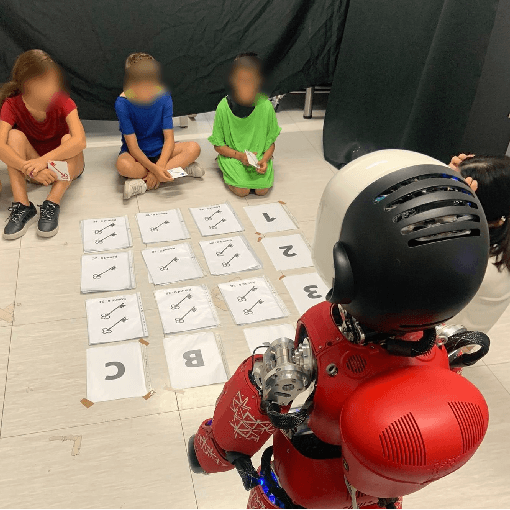

This study presents novel strategies to investigate the mutual influence of trust and group dynamics in children-robot interaction. We implemented a game-like experimental activity with the humanoid robot iCub and designed a questionnaire to assess how the children perceived the interaction. We also aim to verify if the sensors, setups, and tasks are suitable for studying such aspects. The questionnaires' results demonstrate that youths perceive iCub as a friend and, typically, in a positive way. Other preliminary results suggest that, generally, children trusted iCub during the activity and, after its mistakes, they tried to reassure it with sentences such as: "Don't worry iCub, we forgive you". Furthermore, trust towards the robot in group cognitive activity appears to change according to gender: after two consecutive mistakes by the robot, girls tended to trust iCub more than boys. Finally, no significant difference has been evidenced between different age groups across points computed from the game and the self-reported scales. The tool we proposed is suitable for studying trust in human-robot interaction (HRI) across different ages and seems appropriate to understand the mechanism of trust in group interactions.