 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProposing a Game Theory Approach to Explore Group Dynamics with Social Robot
Mar 30, 2026Integrating social robots in our group-based society, beyond the technical challenges, requires considering the social group dynamics. Following the results from preliminary exploratory studies on the influence of social robots on group decisions, the proposed research investigates whether social robots can foster cooperation among group members. To achieve this, I propose a game theory approach, employing the Public Good Game to recreate a simplified and controlled social situation where the robot's influence can be evaluated. Clarifying the role of robots in promoting collaboration among humans might have a significant impact in educational environments, enhancing student learning, as well as in workplace settings, where they could facilitate problem-solving and lead to shared solutions.
"iCub, We Forgive You!" Investigating Trust in a Game Scenario with Kids
Sep 04, 2022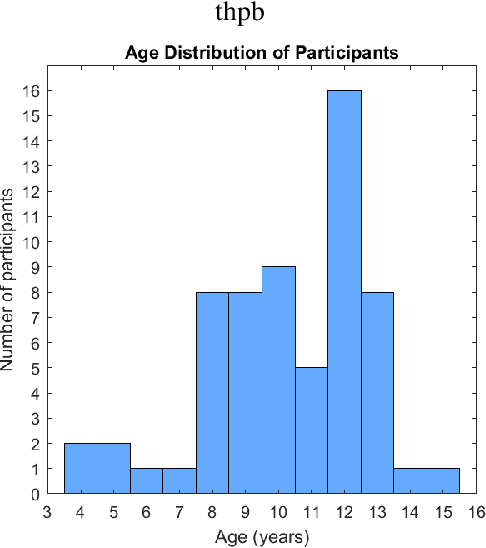
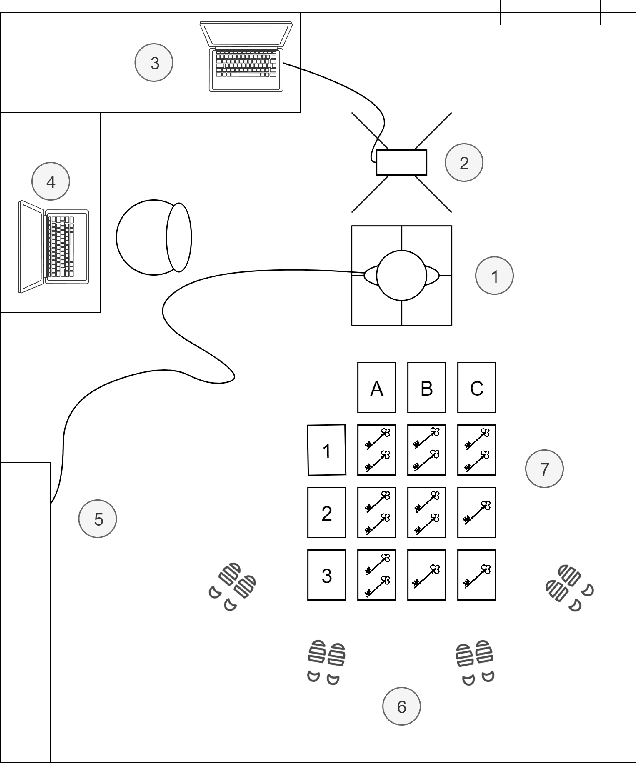
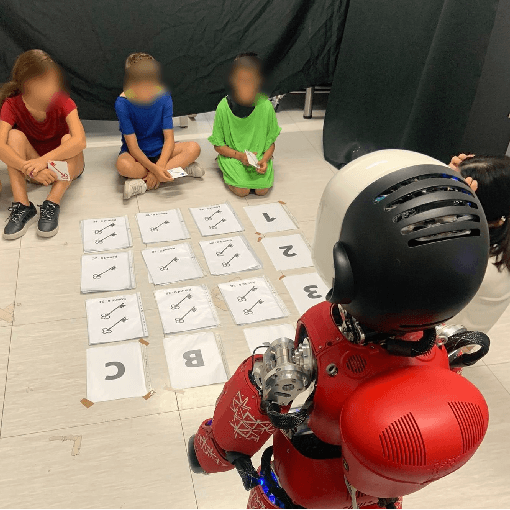

This study presents novel strategies to investigate the mutual influence of trust and group dynamics in children-robot interaction. We implemented a game-like experimental activity with the humanoid robot iCub and designed a questionnaire to assess how the children perceived the interaction. We also aim to verify if the sensors, setups, and tasks are suitable for studying such aspects. The questionnaires' results demonstrate that youths perceive iCub as a friend and, typically, in a positive way. Other preliminary results suggest that, generally, children trusted iCub during the activity and, after its mistakes, they tried to reassure it with sentences such as: "Don't worry iCub, we forgive you". Furthermore, trust towards the robot in group cognitive activity appears to change according to gender: after two consecutive mistakes by the robot, girls tended to trust iCub more than boys. Finally, no significant difference has been evidenced between different age groups across points computed from the game and the self-reported scales. The tool we proposed is suitable for studying trust in human-robot interaction (HRI) across different ages and seems appropriate to understand the mechanism of trust in group interactions.