 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWheelArm-Sim: A Manipulation and Navigation Combined Multimodal Synthetic Data Generation Simulator for Unified Control in Assistive Robotics
Jan 29, 2026Wheelchairs and robotic arms enhance independent living by assisting individuals with upper-body and mobility limitations in their activities of daily living (ADLs). Although recent advancements in assistive robotics have focused on Wheelchair-Mounted Robotic Arms (WMRAs) and wheelchairs separately, integrated and unified control of the combination using machine learning models remains largely underexplored. To fill this gap, we introduce the concept of WheelArm, an integrated cyber-physical system (CPS) that combines wheelchair and robotic arm controls. Data collection is the first step toward developing WheelArm models. In this paper, we present WheelArm-Sim, a simulation framework developed in Isaac Sim for synthetic data collection. We evaluate its capability by collecting a manipulation and navigation combined multimodal dataset, comprising 13 tasks, 232 trajectories, and 67,783 samples. To demonstrate the potential of the WheelArm dataset, we implement a baseline model for action prediction in the mustard-picking task. The results illustrate that data collected from WheelArm-Sim is feasible for a data-driven machine learning model for integrated control.
A Multimodal Data Collection Framework for Dialogue-Driven Assistive Robotics to Clarify Ambiguities: A Wizard-of-Oz Pilot Study
Jan 23, 2026Integrated control of wheelchairs and wheelchair-mounted robotic arms (WMRAs) has strong potential to increase independence for users with severe motor limitations, yet existing interfaces often lack the flexibility needed for intuitive assistive interaction. Although data-driven AI methods show promise, progress is limited by the lack of multimodal datasets that capture natural Human-Robot Interaction (HRI), particularly conversational ambiguity in dialogue-driven control. To address this gap, we propose a multimodal data collection framework that employs a dialogue-based interaction protocol and a two-room Wizard-of-Oz (WoZ) setup to simulate robot autonomy while eliciting natural user behavior. The framework records five synchronized modalities: RGB-D video, conversational audio, inertial measurement unit (IMU) signals, end-effector Cartesian pose, and whole-body joint states across five assistive tasks. Using this framework, we collected a pilot dataset of 53 trials from five participants and validated its quality through motion smoothness analysis and user feedback. The results show that the framework effectively captures diverse ambiguity types and supports natural dialogue-driven interaction, demonstrating its suitability for scaling to a larger dataset for learning, benchmarking, and evaluation of ambiguity-aware assistive control.
Enhanced Robot Arm at the Edge with NLP and Vision Systems
May 27, 2024



This paper introduces a "proof of concept" for a new approach to assistive robotics, integrating edge computing with Natural Language Processing (NLP) and computer vision to enhance the interaction between humans and robotic systems. Our "proof of concept" demonstrates the feasibility of using large language models (LLMs) and vision systems in tandem for interpreting and executing complex commands conveyed through natural language. This integration aims to improve the intuitiveness and accessibility of assistive robotic systems, making them more adaptable to the nuanced needs of users with disabilities. By leveraging the capabilities of edge computing, our system has the potential to minimize latency and support offline capability, enhancing the autonomy and responsiveness of assistive robots. Experimental results from our implementation on a robotic arm show promising outcomes in terms of accurate intent interpretation and object manipulation based on verbal commands. This research lays the groundwork for future developments in assistive robotics, focusing on creating highly responsive, user-centric systems that can significantly improve the quality of life for individuals with disabilities.
Deployment of NLP and LLM Techniques to Control Mobile Robots at the Edge: A Case Study Using GPT-4-Turbo and LLaMA 2
May 27, 2024



This paper investigates the possibility of intuitive human-robot interaction through the application of Natural Language Processing (NLP) and Large Language Models (LLMs) in mobile robotics. We aim to explore the feasibility of using these technologies for edge-based deployment, where traditional cloud dependencies are eliminated. The study specifically contrasts the performance of GPT-4-Turbo, which requires cloud connectivity, with an offline-capable, quantized version of LLaMA 2 (LLaMA 2-7B.Q5 K M). Our results show that GPT-4-Turbo delivers superior performance in interpreting and executing complex commands accurately, whereas LLaMA 2 exhibits significant limitations in consistency and reliability of command execution. Communication between the control computer and the mobile robot is established via a Raspberry Pi Pico W, which wirelessly receives commands from the computer without internet dependency and transmits them through a wired connection to the robot's Arduino controller. This study highlights the potential and challenges of implementing LLMs and NLP at the edge, providing groundwork for future research into fully autonomous and network-independent robotic systems. For video demonstrations and source code, please refer to: https://tinyurl.com/RobocupSym2024.
Energy-Efficient Uncertainty-Aware Biomass Composition Prediction at the Edge
Apr 17, 2024



Clover fixates nitrogen from the atmosphere to the ground, making grass-clover mixtures highly desirable to reduce external nitrogen fertilization. Herbage containing clover additionally promotes higher food intake, resulting in higher milk production. Herbage probing however remains largely unused as it requires a time-intensive manual laboratory analysis. Without this information, farmers are unable to perform localized clover sowing or take targeted fertilization decisions. Deep learning algorithms have been proposed with the goal to estimate the dry biomass composition from images of the grass directly in the fields. The energy-intensive nature of deep learning however limits deployment to practical edge devices such as smartphones. This paper proposes to fill this gap by applying filter pruning to reduce the energy requirement of existing deep learning solutions. We report that although pruned networks are accurate on controlled, high-quality images of the grass, they struggle to generalize to real-world smartphone images that are blurry or taken from challenging angles. We address this challenge by training filter-pruned models using a variance attenuation loss so they can predict the uncertainty of their predictions. When the uncertainty exceeds a threshold, we re-infer using a more accurate unpruned model. This hybrid approach allows us to reduce energy consumption while retaining a high accuracy. We evaluate our algorithm on two datasets: the GrassClover and the Irish clover using an NVIDIA Jetson Nano edge device. We find that we reduce energy reduction with respect to state-of-the-art solutions by 50% on average with only 4% accuracy loss.
PlantPlotGAN: A Physics-Informed Generative Adversarial Network for Plant Disease Prediction
Oct 27, 2023Monitoring plantations is crucial for crop management and producing healthy harvests. Unmanned Aerial Vehicles (UAVs) have been used to collect multispectral images that aid in this monitoring. However, given the number of hectares to be monitored and the limitations of flight, plant disease signals become visually clear only in the later stages of plant growth and only if the disease has spread throughout a significant portion of the plantation. This limited amount of relevant data hampers the prediction models, as the algorithms struggle to generalize patterns with unbalanced or unrealistic augmented datasets effectively. To address this issue, we propose PlantPlotGAN, a physics-informed generative model capable of creating synthetic multispectral plot images with realistic vegetation indices. These indices served as a proxy for disease detection and were used to evaluate if our model could help increase the accuracy of prediction models. The results demonstrate that the synthetic imagery generated from PlantPlotGAN outperforms state-of-the-art methods regarding the Fr\'echet inception distance. Moreover, prediction models achieve higher accuracy metrics when trained with synthetic and original imagery for earlier plant disease detection compared to the training processes based solely on real imagery.
Scheduling Inference Workloads on Distributed Edge Clusters with Reinforcement Learning
Jan 31, 2023



Many real-time applications (e.g., Augmented/Virtual Reality, cognitive assistance) rely on Deep Neural Networks (DNNs) to process inference tasks. Edge computing is considered a key infrastructure to deploy such applications, as moving computation close to the data sources enables us to meet stringent latency and throughput requirements. However, the constrained nature of edge networks poses several additional challenges to the management of inference workloads: edge clusters can not provide unlimited processing power to DNN models, and often a trade-off between network and processing time should be considered when it comes to end-to-end delay requirements. In this paper, we focus on the problem of scheduling inference queries on DNN models in edge networks at short timescales (i.e., few milliseconds). By means of simulations, we analyze several policies in the realistic network settings and workloads of a large ISP, highlighting the need for a dynamic scheduling policy that can adapt to network conditions and workloads. We therefore design ASET, a Reinforcement Learning based scheduling algorithm able to adapt its decisions according to the system conditions. Our results show that ASET effectively provides the best performance compared to static policies when scheduling over a distributed pool of edge resources.
Privacy and Efficiency of Communications in Federated Split Learning
Jan 07, 2023



Everyday, large amounts of sensitive data is distributed across mobile phones, wearable devices, and other sensors. Traditionally, these enormous datasets have been processed on a single system, with complex models being trained to make valuable predictions. Distributed machine learning techniques such as Federated and Split Learning have recently been developed to protect user data and privacy better while ensuring high performance. Both of these distributed learning architectures have advantages and disadvantages. In this paper, we examine these tradeoffs and suggest a new hybrid Federated Split Learning architecture that combines the efficiency and privacy benefits of both. Our evaluation demonstrates how our hybrid Federated Split Learning approach can lower the amount of processing power required by each client running a distributed learning system, reduce training and inference time while keeping a similar accuracy. We also discuss the resiliency of our approach to deep learning privacy inference attacks and compare our solution to other recently proposed benchmarks.
Hyperprofile-based Computation Offloading for Mobile Edge Networks
Jul 28, 2017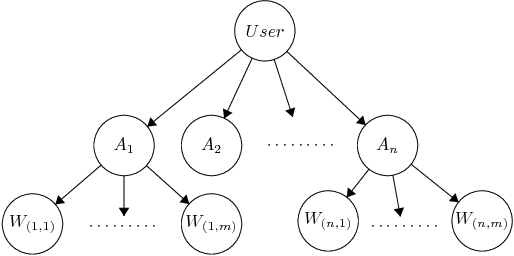
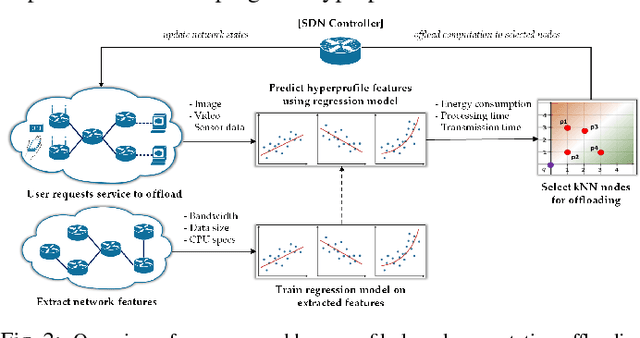
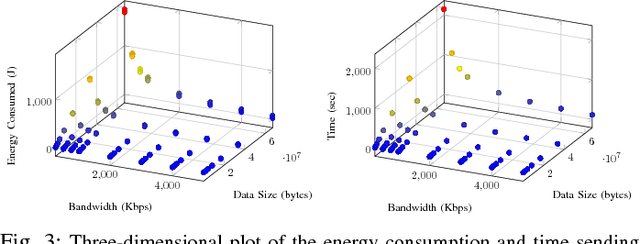
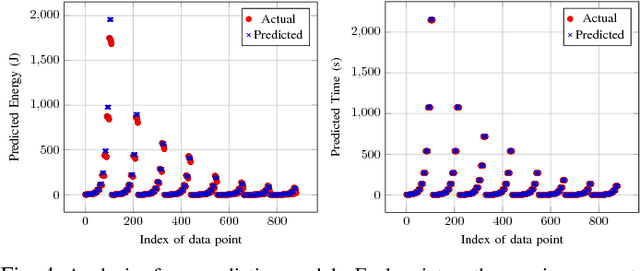
In recent studies, researchers have developed various computation offloading frameworks for bringing cloud services closer to the user via edge networks. Specifically, an edge device needs to offload computationally intensive tasks because of energy and processing constraints. These constraints present the challenge of identifying which edge nodes should receive tasks to reduce overall resource consumption. We propose a unique solution to this problem which incorporates elements from Knowledge-Defined Networking (KDN) to make intelligent predictions about offloading costs based on historical data. Each server instance can be represented in a multidimensional feature space where each dimension corresponds to a predicted metric. We compute features for a "hyperprofile" and position nodes based on the predicted costs of offloading a particular task. We then perform a k-Nearest Neighbor (kNN) query within the hyperprofile to select nodes for offloading computation. This paper formalizes our hyperprofile-based solution and explores the viability of using machine learning (ML) techniques to predict metrics useful for computation offloading. We also investigate the effects of using different distance metrics for the queries. Our results show various network metrics can be modeled accurately with regression, and there are circumstances where kNN queries using Euclidean distance as opposed to rectilinear distance is more favorable.