 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReproducibility in the Control of Autonomous Mobility-on-Demand Systems
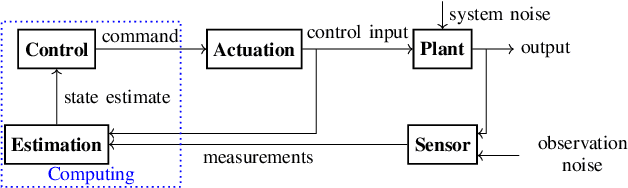
Jun 09, 2025Autonomous Mobility-on-Demand (AMoD) systems, powered by advances in robotics, control, and Machine Learning (ML), offer a promising paradigm for future urban transportation. AMoD offers fast and personalized travel services by leveraging centralized control of autonomous vehicle fleets to optimize operations and enhance service performance. However, the rapid growth of this field has outpaced the development of standardized practices for evaluating and reporting results, leading to significant challenges in reproducibility. As AMoD control algorithms become increasingly complex and data-driven, a lack of transparency in modeling assumptions, experimental setups, and algorithmic implementation hinders scientific progress and undermines confidence in the results. This paper presents a systematic study of reproducibility in AMoD research. We identify key components across the research pipeline, spanning system modeling, control problems, simulation design, algorithm specification, and evaluation, and analyze common sources of irreproducibility. We survey prevalent practices in the literature, highlight gaps, and propose a structured framework to assess and improve reproducibility. Specifically, concrete guidelines are offered, along with a "reproducibility checklist", to support future work in achieving replicable, comparable, and extensible results. While focused on AMoD, the principles and practices we advocate generalize to a broader class of cyber-physical systems that rely on networked autonomy and data-driven control. This work aims to lay the foundation for a more transparent and reproducible research culture in the design and deployment of intelligent mobility systems.
CODEI: Resource-Efficient Task-Driven Co-Design of Perception and Decision Making for Mobile Robots Applied to Autonomous Vehicles
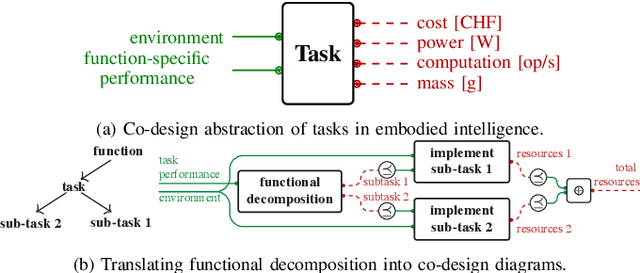
Mar 13, 2025This paper discusses the integration challenges and strategies for designing mobile robots, by focusing on the task-driven, optimal selection of hardware and software to balance safety, efficiency, and minimal usage of resources such as costs, energy, computational requirements, and weight. We emphasize the interplay between perception and motion planning in decision-making by introducing the concept of occupancy queries to quantify the perception requirements for sampling-based motion planners. Sensor and algorithm performance are evaluated using False Negative Rates (FPR) and False Positive Rates (FPR) across various factors such as geometric relationships, object properties, sensor resolution, and environmental conditions. By integrating perception requirements with perception performance, an Integer Linear Programming (ILP) approach is proposed for efficient sensor and algorithm selection and placement. This forms the basis for a co-design optimization that includes the robot body, motion planner, perception pipeline, and computing unit. We refer to this framework for solving the co-design problem of mobile robots as CODEI, short for Co-design of Embodied Intelligence. A case study on developing an Autonomous Vehicle (AV) for urban scenarios provides actionable information for designers, and shows that complex tasks escalate resource demands, with task performance affecting choices of the autonomy stack. The study demonstrates that resource prioritization influences sensor choice: cameras are preferred for cost-effective and lightweight designs, while lidar sensors are chosen for better energy and computational efficiency.
Optimization of Rulebooks via Asymptotically Representing Lexicographic Hierarchies for Autonomous Vehicles
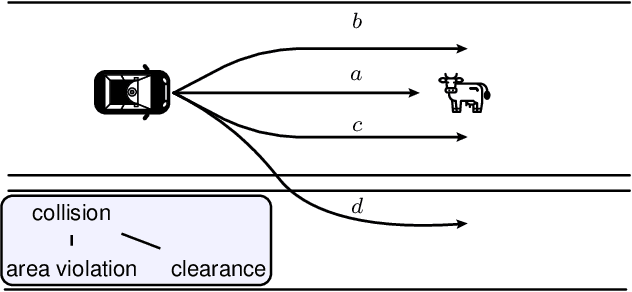
Sep 17, 2024A key challenge in autonomous driving is that Autonomous Vehicles (AVs) must contend with multiple, often conflicting, planning requirements. These requirements naturally form in a hierarchy -- e.g., avoiding a collision is more important than maintaining lane. While the exact structure of this hierarchy remains unknown, to progress towards ensuring that AVs satisfy pre-determined behavior specifications, it is crucial to develop approaches that systematically account for it. Motivated by lexicographic behavior specification in AVs, this work addresses a lexicographic multi-objective motion planning problem, where each objective is incomparably more important than the next -- consider that avoiding a collision is incomparably more important than a lane change violation. This work ties together two elements. Firstly, a multi-objective candidate function that asymptotically represents lexicographic orders is introduced. Unlike existing multi-objective cost function formulations, this approach assures that returned solutions asymptotically align with the lexicographic behavior specification. Secondly, inspired by continuation methods, we propose two algorithms that asymptotically approach minimum rank decisions -- i.e., decisions that satisfy the highest number of important rules possible. Through a couple practical examples, we showcase that the proposed candidate function asymptotically represents the lexicographic hierarchy, and that both proposed algorithms return minimum rank decisions, even when other approaches do not.
A Counterfactual Safety Margin Perspective on the Scoring of Autonomous Vehicles' Riskiness
Aug 18, 2023Autonomous Vehicles (AVs) have the potential to provide numerous societal benefits, such as decreased road accidents and increased overall transportation efficiency. However, quantifying the risk associated with AVs is challenging due to the lack of historical data and the rapidly evolving technology. This paper presents a data-driven framework for comparing the risk of different AVs' behaviors in various operational design domains (ODDs), based on counterfactual simulations of "misbehaving" road users. We introduce the concept of counterfactual safety margin, which represents the minimum deviation from normal behavior that could lead to a collision. This concept helps to find the most critical scenarios but also to assess the frequency and severity of risk of AVs. We show that the proposed methodology is applicable even when the AV's behavioral policy is unknown -- through worst- and best-case analyses -- making the method useful also to external third-party risk assessors. Our experimental results demonstrate the correlation between the safety margin, the driving policy quality, and the ODD shedding light on the relative risk associated with different AV providers. This work contributes to AV safety assessment and aids in addressing legislative and insurance concerns surrounding this emerging technology.
Factorization of Multi-Agent Sampling-Based Motion Planning
Apr 01, 2023Modern robotics often involves multiple embodied agents operating within a shared environment. Path planning in these cases is considerably more challenging than in single-agent scenarios. Although standard Sampling-based Algorithms (SBAs) can be used to search for solutions in the robots' joint space, this approach quickly becomes computationally intractable as the number of agents increases. To address this issue, we integrate the concept of factorization into sampling-based algorithms, which requires only minimal modifications to existing methods. During the search for a solution we can decouple (i.e., factorize) different subsets of agents into independent lower-dimensional search spaces once we certify that their future solutions will be independent of each other using a factorization heuristic. Consequently, we progressively construct a lean hypergraph where certain (hyper-)edges split the agents to independent subgraphs. In the best case, this approach can reduce the growth in dimensionality of the search space from exponential to linear in the number of agents. On average, fewer samples are needed to find high-quality solutions while preserving the optimality, completeness, and anytime properties of SBAs. We present a general implementation of a factorized SBA, derive an analytical gain in terms of sample complexity for PRM*, and showcase empirical results for RRG.
How Bad is Selfish Driving? Bounding the Inefficiency of Equilibria in Urban Driving Games
Oct 24, 2022We consider the interaction among agents engaging in a driving task and we model it as general-sum game. This class of games exhibits a plurality of different equilibria posing the issue of equilibrium selection. While selecting the most efficient equilibrium (in term of social cost) is often impractical from a computational standpoint, in this work we study the (in)efficiency of any equilibrium players might agree to play. More specifically, we bound the equilibrium inefficiency by modeling driving games as particular type of congestion games over spatio-temporal resources. We obtain novel guarantees that refine existing bounds on the Price of Anarchy (PoA) as a function of problem-dependent game parameters. For instance, the relative trade-off between proximity costs and personal objectives such as comfort and progress. Although the obtained guarantees concern open-loop trajectories, we observe efficient equilibria even when agents employ closed-loop policies trained via decentralized multi-agent reinforcement learning.
Categorification of Negative Information using Enrichment
Jul 27, 2022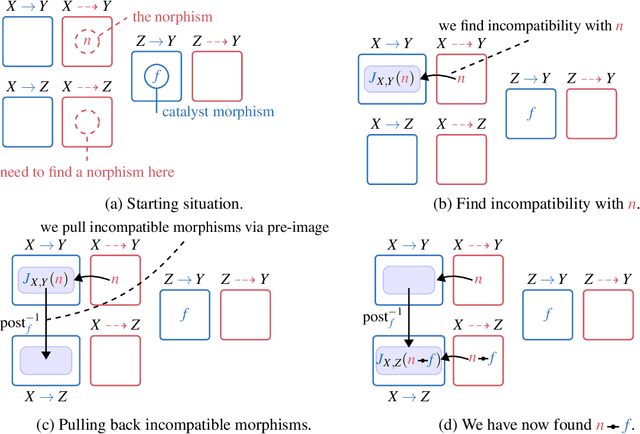
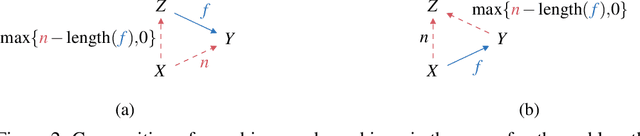
In many applications of category theory it is useful to reason about "negative information". For example, in planning problems, providing an optimal solution is the same as giving a feasible solution (the "positive" information) together with a proof of the fact that there cannot be feasible solutions better than the one given (the "negative" information). We model negative information by introducing the concept of "norphisms", as opposed to the positive information of morphisms. A "nategory" is a category that has "Nom"-sets in addition to hom-sets, and specifies the compatibility rules between norphisms and morphisms. With this setup we can choose to work in "coherent" "subnategories": subcategories that describe a potential instantiation of the world in which all morphisms and norphisms are compatible. We derive the composition rules for norphisms in a coherent subnategory; we show that norphisms do not compose by themselves, but rather they need to use morphisms as catalysts. We have two distinct rules of the type $\text{morphism} + \text{norphism} \rightarrow \text{norphism}$. We then show that those complex rules for norphism inference are actually as natural as the ones for morphisms, from the perspective of enriched category theory. Every small category is enriched over $\text{P}= \langle \text{Set}, \times, 1\rangle$. We show that we can derive the machinery of norphisms by considering an enrichment over a certain monoidal category called PN(for "positive"/"negative"). In summary, we show that an alternative to considering negative information using logic on top of the categorical formalization is to "categorify" the negative information, obtaining negative arrows that live at the same level as the positive arrows, and suggest that the new inference rules are born of the same substance from the perspective of enriched category theory.
Task-driven Modular Co-design of Vehicle Control Systems
Mar 30, 2022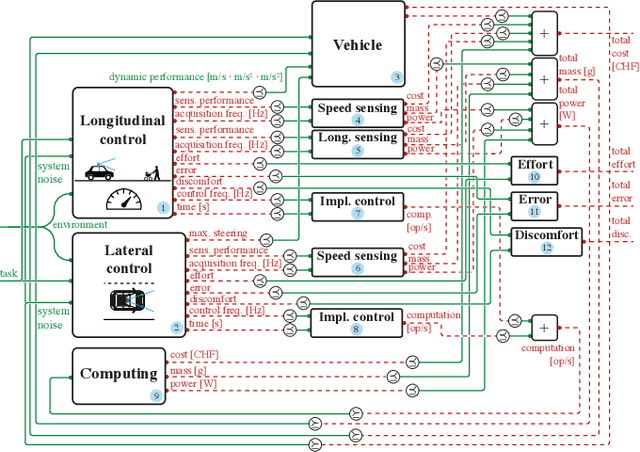
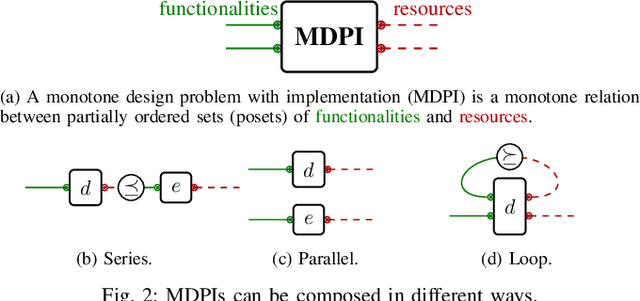
When designing autonomous systems, we need to consider multiple trade-offs at various abstraction levels, and the choices of single (hardware and software) components need to be studied jointly. In this work we consider the problem of designing the control algorithm as well as the platform on which it is executed. In particular, we focus on vehicle control systems, and formalize state-of-the-art control schemes as monotone feasibility relations. We then show how, leveraging a monotone theory of co-design, we can study the embedding of control synthesis problems into the task-driven co-design problem of a robotic platform. The properties of the proposed approach are illustrated by considering urban driving scenarios. We show how, given a particular task, we can efficiently compute Pareto optimal design solutions.
nuReality: A VR environment for research of pedestrian and autonomous vehicle interactions
Jan 12, 2022


We present nuReality, a virtual reality 'VR' environment designed to test the efficacy of vehicular behaviors to communicate intent during interactions between autonomous vehicles 'AVs' and pedestrians at urban intersections. In this project we focus on expressive behaviors as a means for pedestrians to readily recognize the underlying intent of the AV's movements. VR is an ideal tool to use to test these situations as it can be immersive and place subjects into these potentially dangerous scenarios without risk. nuReality provides a novel and immersive virtual reality environment that includes numerous visual details (road and building texturing, parked cars, swaying tree limbs) as well as auditory details (birds chirping, cars honking in the distance, people talking). In these files we present the nuReality environment, its 10 unique vehicle behavior scenarios, and the Unreal Engine and Autodesk Maya source files for each scenario. The files are publicly released as open source at www.nuReality.org, to support the academic community studying the critical AV-pedestrian interaction.
Posetal Games: Efficiency, Existence, and Refinement of Equilibria in Games with Prioritized Metrics
Nov 13, 2021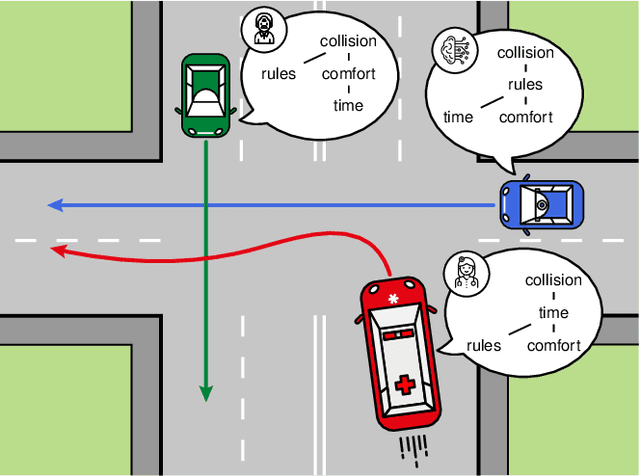
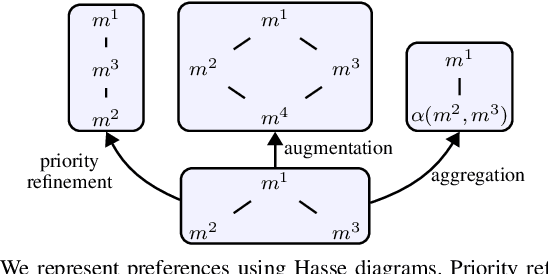
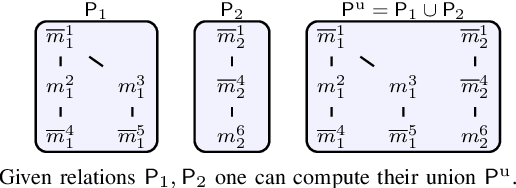
Modern applications require robots to comply with multiple, often conflicting rules and to interact with the other agents. We present Posetal Games as a class of games in which each player expresses a preference over the outcomes via a partially ordered set of metrics. This allows one to combine hierarchical priorities of each player with the interactive nature of the environment. By contextualizing standard game theoretical notions, we provide two sufficient conditions on the preference of the players to prove existence of pure Nash Equilibria in finite action sets. Moreover, we define formal operations on the preference structures and link them to a refinement of the game solutions, showing how the set of equilibria can be systematically shrunk. The presented results are showcased in a driving game where autonomous vehicles select from a finite set of trajectories. The results demonstrate the interpretability of results in terms of minimum-rank-violation for each player.