 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCommunications-Aware NMPC for Multi-Rotor Aerial Relay Networks Under Jamming Interference
Mar 30, 2026Multi-Rotor Aerial Vehicles (MRAVs) are increasingly used in communication-dependent missions where connectivity loss directly compromises task execution. Existing anti-jamming strategies often decouple motion from communication, overlooking that link quality depends on vehicle attitude and antenna orientation. In coplanar platforms, "tilt-to-translate" maneuvers can inadvertently align antenna nulls with communication partners, causing severe degradation under interference. This paper presents a modular communications-aware control framework that combines a high-level max-min trajectory generator with an actuator-level Nonlinear Model Predictive Controller (NMPC). The trajectory layer optimizes the weakest link under jamming, while the NMPC enforces vehicle dynamics, actuator limits, and antenna-alignment constraints. Antenna directionality is handled geometrically, avoiding explicit radiation-pattern parametrization. The method is evaluated in a relay scenario with an active jammer and compared across coplanar and tilted-propeller architectures. Results show a near two-order-of-magnitude increase in minimum end-to-end capacity, markedly reducing outage events, with moderate average-capacity gains. Tilted platforms preserve feasibility and link quality, whereas coplanar vehicles show recurrent degradation. These findings indicate that full actuation is a key enabler of reliable communications-aware operation under adversarial directional constraints.
Task Coordination and Trajectory Optimization for Multi-Aerial Systems via Signal Temporal Logic: A Wind Turbine Inspection Study
Oct 09, 2024This paper presents a method for task allocation and trajectory generation in cooperative inspection missions using a fleet of multirotor drones, with a focus on wind turbine inspection. The approach generates safe, feasible flight paths that adhere to time-sensitive constraints and vehicle limitations by formulating an optimization problem based on Signal Temporal Logic (STL) specifications. An event-triggered replanning mechanism addresses unexpected events and delays, while a generalized robustness scoring method incorporates user preferences and minimizes task conflicts. The approach is validated through simulations in MATLAB and Gazebo, as well as field experiments in a mock-up scenario.
Power Line Inspection Tasks with Multi-Aerial Robot Systems via Signal Temporal Logic Specifications
Feb 09, 2023



A framework for computing feasible and constrained trajectories for a fleet of quad-rotors leveraging on Signal Temporal Logic (STL) specifications for power line inspection tasks is proposed in this paper. The planner allows the formulation of complex missions that avoid obstacles and maintain a safe distance between drones while performing the planned mission. An optimization problem is set to generate optimal strategies that satisfy these specifications and also take vehicle constraints into account. Further, an event-triggered replanner is proposed to reply to unforeseen events and external disturbances. An energy minimization term is also considered to implicitly save quad-rotors battery life while carrying out the mission. Numerical simulations in MATLAB and experimental results show the validity and the effectiveness of the proposed approach, and demonstrate its applicability in real-world scenarios.
* 8 pages, 12 figures, journal paper
A framework for power line inspection tasks with multi-robot systems from signal temporal logic specifications
Mar 04, 2021Inspection of power line infrastructures must be periodically conducted by electric companies in order to ensure reliable electric power distribution. Research efforts are focused on automating the power line inspection process by looking for strategies that satisfy different requirements expressed in terms of potential damage and faults detection. This problem comes up with the need of safe planning and control techniques for autonomous robots to perform visual inspection tasks. Such an application becomes even more interesting and of critical importance when considering a multi-robot extension. In this paper, we propose to compute feasible and constrained trajectories for a fleet of quad-rotors leveraging on Signal Temporal Logic (STL) specifications. The planner allows to formulate rather complex missions avoiding obstacles and forbidden areas along the path. Simulations results achieved in MATLAB show the effectiveness of the proposed approach leading the way to experimental tests on the hardware.
Deep learning control of artificial avatars in group coordination tasks
Jun 11, 2019

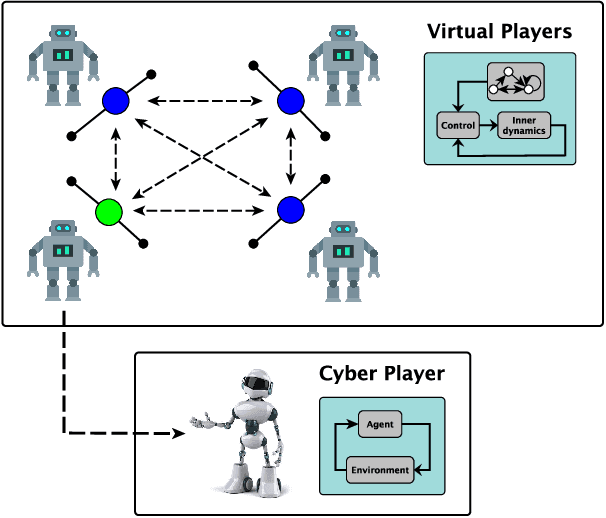
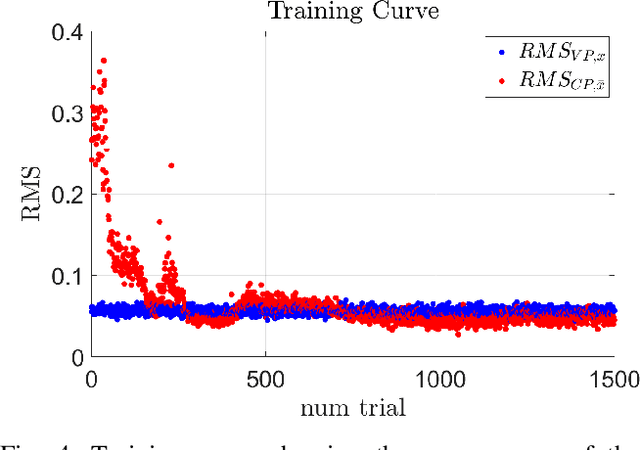
In many joint-action scenarios, humans and robots have to coordinate their movements to accomplish a given shared task. Lifting an object together, sawing a wood log, transferring objects from a point to another are all examples where motor coordination between humans and machines is a crucial requirement. While the dyadic coordination between a human and a robot has been studied in previous investigations, the multi-agent scenario in which a robot has to be integrated into a human group still remains a less explored field of research. In this paper we discuss how to synthesise an artificial agent able to coordinate its motion in human ensembles. Driven by a control architecture based on deep reinforcement learning, such an artificial agent will be able to autonomously move itself in order to synchronise its motion with that of the group while exhibiting human-like kinematic features. As a paradigmatic coordination task we take a group version of the so-called mirror-game which is highlighted as a good benchmark in the human movement literature.