 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Uniformly Scaling Flows: A Density-Aligned Approach to Deep One-Class Classification
Oct 10, 2025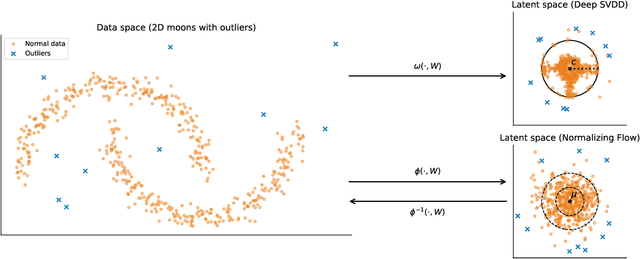
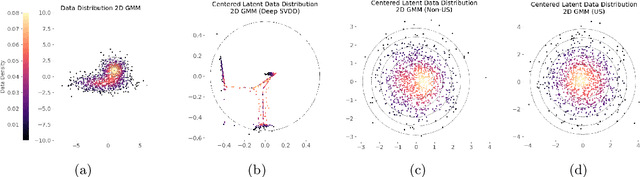
Unsupervised anomaly detection is often framed around two widely studied paradigms. Deep one-class classification, exemplified by Deep SVDD, learns compact latent representations of normality, while density estimators realized by normalizing flows directly model the likelihood of nominal data. In this work, we show that uniformly scaling flows (USFs), normalizing flows with a constant Jacobian determinant, precisely connect these approaches. Specifically, we prove how training a USF via maximum-likelihood reduces to a Deep SVDD objective with a unique regularization that inherently prevents representational collapse. This theoretical bridge implies that USFs inherit both the density faithfulness of flows and the distance-based reasoning of one-class methods. We further demonstrate that USFs induce a tighter alignment between negative log-likelihood and latent norm than either Deep SVDD or non-USFs, and how recent hybrid approaches combining one-class objectives with VAEs can be naturally extended to USFs. Consequently, we advocate using USFs as a drop-in replacement for non-USFs in modern anomaly detection architectures. Empirically, this substitution yields consistent performance gains and substantially improved training stability across multiple benchmarks and model backbones for both image-level and pixel-level detection. These results unify two major anomaly detection paradigms, advancing both theoretical understanding and practical performance.
Decentralizing Multi-Agent Reinforcement Learning with Temporal Causal Information
Jun 09, 2025Reinforcement learning (RL) algorithms can find an optimal policy for a single agent to accomplish a particular task. However, many real-world problems require multiple agents to collaborate in order to achieve a common goal. For example, a robot executing a task in a warehouse may require the assistance of a drone to retrieve items from high shelves. In Decentralized Multi-Agent RL (DMARL), agents learn independently and then combine their policies at execution time, but often must satisfy constraints on compatibility of local policies to ensure that they can achieve the global task when combined. In this paper, we study how providing high-level symbolic knowledge to agents can help address unique challenges of this setting, such as privacy constraints, communication limitations, and performance concerns. In particular, we extend the formal tools used to check the compatibility of local policies with the team task, making decentralized training with theoretical guarantees usable in more scenarios. Furthermore, we empirically demonstrate that symbolic knowledge about the temporal evolution of events in the environment can significantly expedite the learning process in DMARL.
A Cautionary Tale About "Neutrally" Informative AI Tools Ahead of the 2025 Federal Elections in Germany
Feb 21, 2025In this study, we examine the reliability of AI-based Voting Advice Applications (VAAs) and large language models (LLMs) in providing objective political information. Our analysis is based upon a comparison with party responses to 38 statements of the Wahl-O-Mat, a well-established German online tool that helps inform voters by comparing their views with political party positions. For the LLMs, we identify significant biases. They exhibit a strong alignment (over 75% on average) with left-wing parties and a substantially lower alignment with center-right (smaller 50%) and right-wing parties (around 30%). Furthermore, for the VAAs, intended to objectively inform voters, we found substantial deviations from the parties' stated positions in Wahl-O-Mat: While one VAA deviated in 25% of cases, another VAA showed deviations in more than 50% of cases. For the latter, we even observed that simple prompt injections led to severe hallucinations, including false claims such as non-existent connections between political parties and right-wing extremist ties.
What is Formal Verification without Specifications? A Survey on mining LTL Specifications
Jan 27, 2025Virtually all verification techniques using formal methods rely on the availability of a formal specification, which describes the design requirements precisely. However, formulating specifications remains a manual task that is notoriously challenging and error-prone. To address this bottleneck in formal verification, recent research has thus focussed on automatically generating specifications for formal verification from examples of (desired and undesired) system behavior. In this survey, we list and compare recent advances in mining specifications in Linear Temporal Logic (LTL), the de facto standard specification language for reactive systems. Several approaches have been designed for learning LTL formulas, which address different aspects and settings of specification design. Moreover, the approaches rely on a diverse range of techniques such as constraint solving, neural network training, enumerative search, etc. We survey the current state-of-the-art techniques and compare them for the convenience of the formal methods practitioners.
Learning Tree Pattern Transformations
Oct 10, 2024
Explaining why and how a tree $t$ structurally differs from another tree $t^*$ is a question that is encountered throughout computer science, including in understanding tree-structured data such as XML or JSON data. In this article, we explore how to learn explanations for structural differences between pairs of trees from sample data: suppose we are given a set $\{(t_1, t_1^*),\dots, (t_n, t_n^*)\}$ of pairs of labelled, ordered trees; is there a small set of rules that explains the structural differences between all pairs $(t_i, t_i^*)$? This raises two research questions: (i) what is a good notion of "rule" in this context?; and (ii) how can sets of rules explaining a data set be learnt algorithmically? We explore these questions from the perspective of database theory by (1) introducing a pattern-based specification language for tree transformations; (2) exploring the computational complexity of variants of the above algorithmic problem, e.g. showing NP-hardness for very restricted variants; and (3) discussing how to solve the problem for data from CS education research using SAT solvers.
VeriFlow: Modeling Distributions for Neural Network Verification
Jun 20, 2024Formal verification has emerged as a promising method to ensure the safety and reliability of neural networks. Naively verifying a safety property amounts to ensuring the safety of a neural network for the whole input space irrespective of any training or test set. However, this also implies that the safety of the neural network is checked even for inputs that do not occur in the real-world and have no meaning at all, often resulting in spurious errors. To tackle this shortcoming, we propose the VeriFlow architecture as a flow based density model tailored to allow any verification approach to restrict its search to the some data distribution of interest. We argue that our architecture is particularly well suited for this purpose because of two major properties. First, we show that the transformation and log-density function that are defined by our model are piece-wise affine. Therefore, the model allows the usage of verifiers based on SMT with linear arithmetic. Second, upper density level sets (UDL) of the data distribution take the shape of an $L^p$-ball in the latent space. As a consequence, representations of UDLs specified by a given probability are effectively computable in latent space. This allows for SMT and abstract interpretation approaches with fine-grained, probabilistically interpretable, control regarding on how (a)typical the inputs subject to verification are.
Using Large Language Models to Automate and Expedite Reinforcement Learning with Reward Machine
Feb 11, 2024



We present LARL-RM (Large language model-generated Automaton for Reinforcement Learning with Reward Machine) algorithm in order to encode high-level knowledge into reinforcement learning using automaton to expedite the reinforcement learning. Our method uses Large Language Models (LLM) to obtain high-level domain-specific knowledge using prompt engineering instead of providing the reinforcement learning algorithm directly with the high-level knowledge which requires an expert to encode the automaton. We use chain-of-thought and few-shot methods for prompt engineering and demonstrate that our method works using these approaches. Additionally, LARL-RM allows for fully closed-loop reinforcement learning without the need for an expert to guide and supervise the learning since LARL-RM can use the LLM directly to generate the required high-level knowledge for the task at hand. We also show the theoretical guarantee of our algorithm to converge to an optimal policy. We demonstrate that LARL-RM speeds up the convergence by 30% by implementing our method in two case studies.
Synthesizing Efficiently Monitorable Formulas in Metric Temporal Logic
Oct 26, 2023In runtime verification, manually formalizing a specification for monitoring system executions is a tedious and error-prone process. To address this issue, we consider the problem of automatically synthesizing formal specifications from system executions. To demonstrate our approach, we consider the popular specification language Metric Temporal Logic (MTL), which is particularly tailored towards specifying temporal properties for cyber-physical systems (CPS). Most of the classical approaches for synthesizing temporal logic formulas aim at minimizing the size of the formula. However, for efficiency in monitoring, along with the size, the amount of "lookahead" required for the specification becomes relevant, especially for safety-critical applications. We formalize this notion and devise a learning algorithm that synthesizes concise formulas having bounded lookahead. To do so, our algorithm reduces the synthesis task to a series of satisfiability problems in Linear Real Arithmetic (LRA) and generates MTL formulas from their satisfying assignments. The reduction uses a novel encoding of a popular MTL monitoring procedure using LRA. Finally, we implement our algorithm in a tool called TEAL and demonstrate its ability to synthesize efficiently monitorable MTL formulas in a CPS application.
Defending Our Privacy With Backdoors
Oct 12, 2023



The proliferation of large AI models trained on uncurated, often sensitive web-scraped data has raised significant privacy concerns. One of the concerns is that adversaries can extract information about the training data using privacy attacks. Unfortunately, the task of removing specific information from the models without sacrificing performance is not straightforward and has proven to be challenging. We propose a rather easy yet effective defense based on backdoor attacks to remove private information such as names of individuals from models, and focus in this work on text encoders. Specifically, through strategic insertion of backdoors, we align the embeddings of sensitive phrases with those of neutral terms-"a person" instead of the person's name. Our empirical results demonstrate the effectiveness of our backdoor-based defense on CLIP by assessing its performance using a specialized privacy attack for zero-shot classifiers. Our approach provides not only a new "dual-use" perspective on backdoor attacks, but also presents a promising avenue to enhance the privacy of individuals within models trained on uncurated web-scraped data.
Reinforcement Learning with Temporal-Logic-Based Causal Diagrams
Jun 23, 2023We study a class of reinforcement learning (RL) tasks where the objective of the agent is to accomplish temporally extended goals. In this setting, a common approach is to represent the tasks as deterministic finite automata (DFA) and integrate them into the state-space for RL algorithms. However, while these machines model the reward function, they often overlook the causal knowledge about the environment. To address this limitation, we propose the Temporal-Logic-based Causal Diagram (TL-CD) in RL, which captures the temporal causal relationships between different properties of the environment. We exploit the TL-CD to devise an RL algorithm in which an agent requires significantly less exploration of the environment. To this end, based on a TL-CD and a task DFA, we identify configurations where the agent can determine the expected rewards early during an exploration. Through a series of case studies, we demonstrate the benefits of using TL-CDs, particularly the faster convergence of the algorithm to an optimal policy due to reduced exploration of the environment.