 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Computational Complexity of Counting Linear Regions in ReLU Neural Networks
May 22, 2025An established measure of the expressive power of a given ReLU neural network is the number of linear regions into which it partitions the input space. There exist many different, non-equivalent definitions of what a linear region actually is. We systematically assess which papers use which definitions and discuss how they relate to each other. We then analyze the computational complexity of counting the number of such regions for the various definitions. Generally, this turns out to be an intractable problem. We prove NP- and #P-hardness results already for networks with one hidden layer and strong hardness of approximation results for two or more hidden layers. Finally, on the algorithmic side, we demonstrate that counting linear regions can at least be achieved in polynomial space for some common definitions.
On the Depth of Monotone ReLU Neural Networks and ICNNs
May 09, 2025



We study two models of ReLU neural networks: monotone networks (ReLU$^+$) and input convex neural networks (ICNN). Our focus is on expressivity, mostly in terms of depth, and we prove the following lower bounds. For the maximum function MAX$_n$ computing the maximum of $n$ real numbers, we show that ReLU$^+$ networks cannot compute MAX$_n$, or even approximate it. We prove a sharp $n$ lower bound on the ICNN depth complexity of MAX$_n$. We also prove depth separations between ReLU networks and ICNNs; for every $k$, there is a depth-2 ReLU network of size $O(k^2)$ that cannot be simulated by a depth-$k$ ICNN. The proofs are based on deep connections between neural networks and polyhedral geometry, and also use isoperimetric properties of triangulations.
The Karp Dataset
Jan 24, 2025Understanding the mathematical reasoning capabilities of Large Language Models (LLMs) is a central topic in the study of artificial intelligence. This new domain necessitates the creation of datasets of reasoning tasks for both training and benchmarking the performance of LLMs. To this end, we introduce the Karp dataset: The first dataset composed of detailed proofs of NP-completeness reductions. The reductions vary in difficulty, ranging from simple exercises of undergraduate courses to more challenging reductions from academic papers. We compare the performance of state-of-the-art models on this task and demonstrate the effect of fine-tuning with the Karp dataset on reasoning capacity.
Depth Separations in Neural Networks: Separating the Dimension from the Accuracy
Feb 11, 2024We prove an exponential separation between depth 2 and depth 3 neural networks, when approximating an $\mathcal{O}(1)$-Lipschitz target function to constant accuracy, with respect to a distribution with support in $[0,1]^{d}$, assuming exponentially bounded weights. This addresses an open problem posed in \citet{safran2019depth}, and proves that the curse of dimensionality manifests in depth 2 approximation, even in cases where the target function can be represented efficiently using depth 3. Previously, lower bounds that were used to separate depth 2 from depth 3 required that at least one of the Lipschitz parameter, target accuracy or (some measure of) the size of the domain of approximation scale polynomially with the input dimension, whereas we fix the former two and restrict our domain to the unit hypercube. Our lower bound holds for a wide variety of activation functions, and is based on a novel application of an average- to worst-case random self-reducibility argument, to reduce the problem to threshold circuits lower bounds.
How Many Neurons Does it Take to Approximate the Maximum?
Jul 18, 2023


We study the size of a neural network needed to approximate the maximum function over $d$ inputs, in the most basic setting of approximating with respect to the $L_2$ norm, for continuous distributions, for a network that uses ReLU activations. We provide new lower and upper bounds on the width required for approximation across various depths. Our results establish new depth separations between depth 2 and 3, and depth 3 and 5 networks, as well as providing a depth $\mathcal{O}(\log(\log(d)))$ and width $\mathcal{O}(d)$ construction which approximates the maximum function, significantly improving upon the depth requirements of the best previously known bounds for networks with linearly-bounded width. Our depth separation results are facilitated by a new lower bound for depth 2 networks approximating the maximum function over the uniform distribution, assuming an exponential upper bound on the size of the weights. Furthermore, we are able to use this depth 2 lower bound to provide tight bounds on the number of neurons needed to approximate the maximum by a depth 3 network. Our lower bounds are of potentially broad interest as they apply to the widely studied and used \emph{max} function, in contrast to many previous results that base their bounds on specially constructed or pathological functions and distributions.
Size and depth of monotone neural networks: interpolation and approximation
Jul 12, 2022Monotone functions and data sets arise in a variety of applications. We study the interpolation problem for monotone data sets: The input is a monotone data set with $n$ points, and the goal is to find a size and depth efficient monotone neural network, with non negative parameters and threshold units, that interpolates the data set. We show that there are monotone data sets that cannot be interpolated by a monotone network of depth $2$. On the other hand, we prove that for every monotone data set with $n$ points in $\mathbb{R}^d$, there exists an interpolating monotone network of depth $4$ and size $O(nd)$. Our interpolation result implies that every monotone function over $[0,1]^d$ can be approximated arbitrarily well by a depth-4 monotone network, improving the previous best-known construction of depth $d+1$. Finally, building on results from Boolean circuit complexity, we show that the inductive bias of having positive parameters can lead to a super-polynomial blow-up in the number of neurons when approximating monotone functions.
Size and Depth Separation in Approximating Natural Functions with Neural Networks
Feb 03, 2021When studying the expressive power of neural networks, a main challenge is to understand how the size and depth of the network affect its ability to approximate real functions. However, not all functions are interesting from a practical viewpoint: functions of interest usually have a polynomially-bounded Lipschitz constant, and can be computed efficiently. We call functions that satisfy these conditions "natural", and explore the benefits of size and depth for approximation of natural functions with ReLU networks. As we show, this problem is more challenging than the corresponding problem for non-natural functions. We give barriers to showing depth-lower-bounds: Proving existence of a natural function that cannot be approximated by polynomial-size networks of depth $4$ would settle longstanding open problems in computational complexity. It implies that beyond depth $4$ there is a barrier to showing depth-separation for natural functions, even between networks of constant depth and networks of nonconstant depth. We also study size-separation, namely, whether there are natural functions that can be approximated with networks of size $O(s(d))$, but not with networks of size $O(s'(d))$. We show a complexity-theoretic barrier to proving such results beyond size $O(d\log^2(d))$, but also show an explicit natural function, that can be approximated with networks of size $O(d)$ and not with networks of size $o(d/\log d)$. For approximation in $L_\infty$ we achieve such separation already between size $O(d)$ and size $o(d)$. Moreover, we show superpolynomial size lower bounds and barriers to such lower bounds, depending on the assumptions on the function. Our size-separation results rely on an analysis of size lower bounds for Boolean functions, which is of independent interest: We show linear size lower bounds for computing explicit Boolean functions with neural networks and threshold circuits.
Tight Hardness Results for Training Depth-2 ReLU Networks
Nov 27, 2020We prove several hardness results for training depth-2 neural networks with the ReLU activation function; these networks are simply weighted sums (that may include negative coefficients) of ReLUs. Our goal is to output a depth-2 neural network that minimizes the square loss with respect to a given training set. We prove that this problem is NP-hard already for a network with a single ReLU. We also prove NP-hardness for outputting a weighted sum of $k$ ReLUs minimizing the squared error (for $k>1$) even in the realizable setting (i.e., when the labels are consistent with an unknown depth-2 ReLU network). We are also able to obtain lower bounds on the running time in terms of the desired additive error $\epsilon$. To obtain our lower bounds, we use the Gap Exponential Time Hypothesis (Gap-ETH) as well as a new hypothesis regarding the hardness of approximating the well known Densest $\kappa$-Subgraph problem in subexponential time (these hypotheses are used separately in proving different lower bounds). For example, we prove that under reasonable hardness assumptions, any proper learning algorithm for finding the best fitting ReLU must run in time exponential in $1/\epsilon^2$. Together with a previous work regarding improperly learning a ReLU (Goel et al., COLT'17), this implies the first separation between proper and improper algorithms for learning a ReLU. We also study the problem of properly learning a depth-2 network of ReLUs with bounded weights giving new (worst-case) upper bounds on the running time needed to learn such networks both in the realizable and agnostic settings. Our upper bounds on the running time essentially matches our lower bounds in terms of the dependency on $\epsilon$.
Cognitive Model Priors for Predicting Human Decisions
May 22, 2019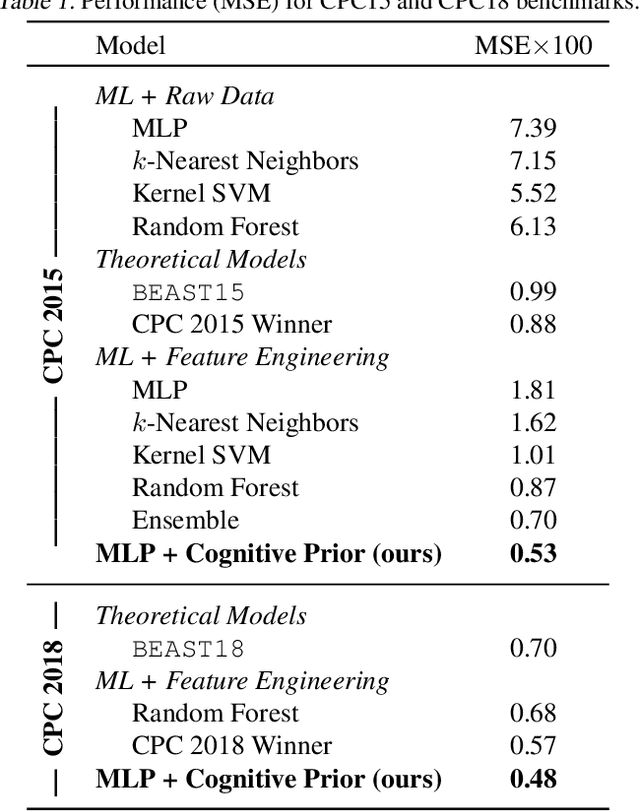
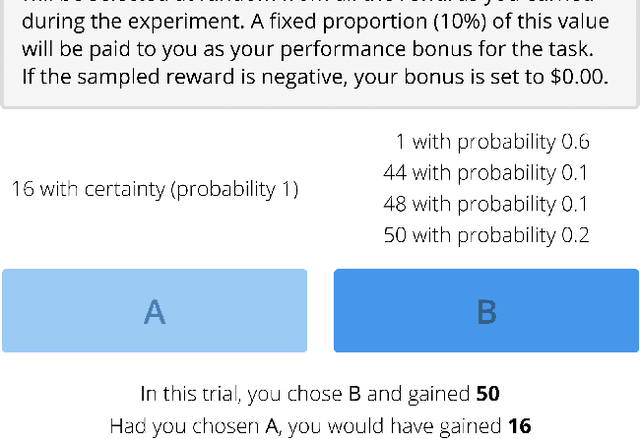
Human decision-making underlies all economic behavior. For the past four decades, human decision-making under uncertainty has continued to be explained by theoretical models based on prospect theory, a framework that was awarded the Nobel Prize in Economic Sciences. However, theoretical models of this kind have developed slowly, and robust, high-precision predictive models of human decisions remain a challenge. While machine learning is a natural candidate for solving these problems, it is currently unclear to what extent it can improve predictions obtained by current theories. We argue that this is mainly due to data scarcity, since noisy human behavior requires massive sample sizes to be accurately captured by off-the-shelf machine learning methods. To solve this problem, what is needed are machine learning models with appropriate inductive biases for capturing human behavior, and larger datasets. We offer two contributions towards this end: first, we construct "cognitive model priors" by pretraining neural networks with synthetic data generated by cognitive models (i.e., theoretical models developed by cognitive psychologists). We find that fine-tuning these networks on small datasets of real human decisions results in unprecedented state-of-the-art improvements on two benchmark datasets. Second, we present the first large-scale dataset for human decision-making, containing over 240,000 human judgments across over 13,000 decision problems. This dataset reveals the circumstances where cognitive model priors are useful, and provides a new standard for benchmarking prediction of human decisions under uncertainty.
Predicting human decisions with behavioral theories and machine learning
Apr 15, 2019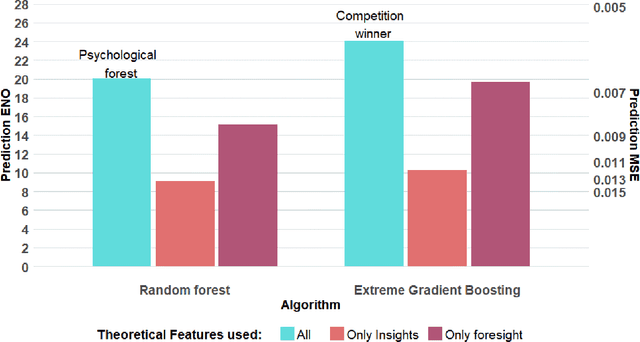
Behavioral decision theories aim to explain human behavior. Can they help predict it? An open tournament for prediction of human choices in fundamental economic decision tasks is presented. The results suggest that integration of certain behavioral theories as features in machine learning systems provides the best predictions. Surprisingly, the most useful theories for prediction build on basic properties of human and animal learning and are very different from mainstream decision theories that focus on deviations from rational choice. Moreover, we find that theoretical features should be based not only on qualitative behavioral insights (e.g. loss aversion), but also on quantitative behavioral foresights generated by functional descriptive models (e.g. Prospect Theory). Our analysis prescribes a recipe for derivation of explainable, useful predictions of human decisions.