 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"It's like a pet...but my pet doesn't collect data about me": Multi-person Households' Privacy Design Preferences for Household Robots
Feb 19, 2026Household robots boasting mobility, more sophisticated sensors, and powerful processing models have become increasingly prevalent in the commercial market. However, these features may expose users to unwanted privacy risks, including unsolicited data collection and unauthorized data sharing. While security and privacy researchers thus far have explored people's privacy concerns around household robots, literature investigating people's preferred privacy designs and mitigation strategies is still limited. Additionally, the existing literature has not yet accounted for multi-user perspectives on privacy design and household robots. We aimed to fill this gap by conducting in-person participatory design sessions with 15 households to explore how they would design a privacy-aware household robot based on their concerns and expectations. We found that participants did not trust that robots, or their respective manufacturers, would respect the data privacy of household members or operate in a multi-user ecosystem without jeopardizing users' personal data. Based on these concerns, they generated designs that gave them authority over their data, contained accessible controls and notification systems, and could be customized and tailored to suit the needs and preferences of each user over time. We synthesize our findings into actionable design recommendations for robot manufacturers and developers.
Elements of Robot Morphology: Supporting Designers in Robot Form Exploration
Feb 09, 2026Robot morphology, the form, shape, and structure of robots, is a key design space in human-robot interaction (HRI), shaping how robots function, express themselves, and interact with people. Yet, despite its importance, little is known about how design frameworks can guide systematic form exploration. To address this gap, we introduce Elements of Robot Morphology, a framework that identifies five fundamental elements: perception, articulation, end effectors, locomotion, and structure. Derived from an analysis of existing robots, the framework supports structured exploration of diverse robot forms. To operationalize the framework, we developed Morphology Exploration Blocks (MEB), a set of tangible blocks that enable hands-on, collaborative experimentation with robot morphologies. We evaluate the framework and toolkit through a case study and design workshops, showing how they support analysis, ideation, reflection, and collaborative robot design.
Making Informed Decisions: Supporting Cobot Integration Considering Business and Worker Preferences
Jan 10, 2024



Robots are ubiquitous in small-to-large-scale manufacturers. While collaborative robots (cobots) have significant potential in these settings due to their flexibility and ease of use, proper integration is critical to realize their full potential. Specifically, cobots need to be integrated in ways that utilize their strengths, improve manufacturing performance, and facilitate use in concert with human workers. Effective integration requires careful consideration and the knowledge of roboticists, manufacturing engineers, and business administrators. We propose an approach involving the stages of planning, analysis, development, and presentation, to inform manufacturers about cobot integration within their facilities prior to the integration process. We contextualize our approach in a case study with an SME collaborator and discuss insights learned.
CONFIDANT: A Privacy Controller for Social Robots
Jan 08, 2022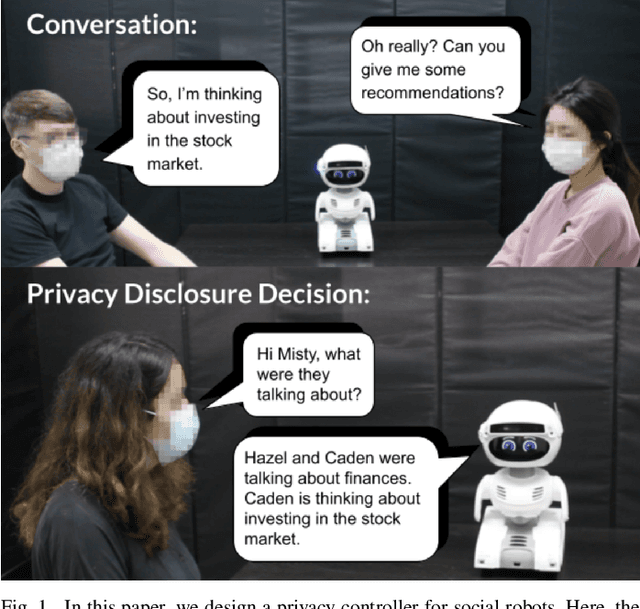
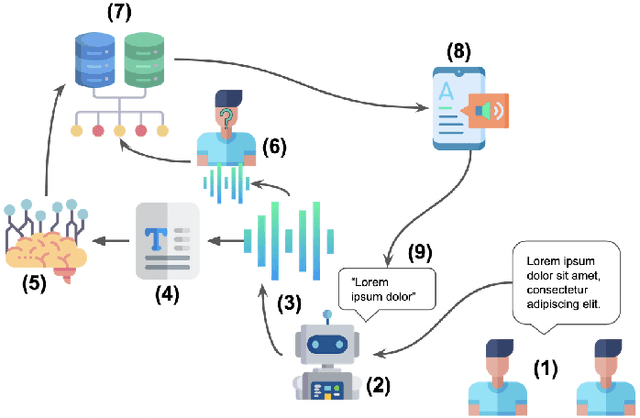
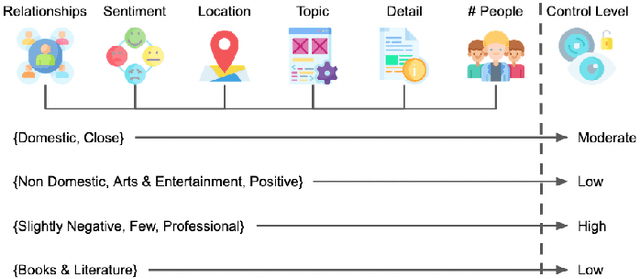
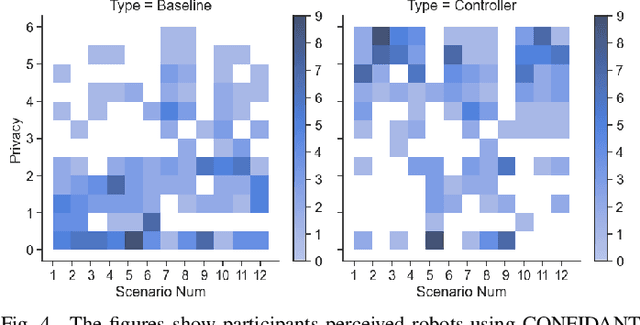
As social robots become increasingly prevalent in day-to-day environments, they will participate in conversations and appropriately manage the information shared with them. However, little is known about how robots might appropriately discern the sensitivity of information, which has major implications for human-robot trust. As a first step to address a part of this issue, we designed a privacy controller, CONFIDANT, for conversational social robots, capable of using contextual metadata (e.g., sentiment, relationships, topic) from conversations to model privacy boundaries. Afterwards, we conducted two crowdsourced user studies. The first study (n=174) focused on whether a variety of human-human interaction scenarios were perceived as either private/sensitive or non-private/non-sensitive. The findings from our first study were used to generate association rules. Our second study (n=95) evaluated the effectiveness and accuracy of the privacy controller in human-robot interaction scenarios by comparing a robot that used our privacy controller against a baseline robot with no privacy controls. Our results demonstrate that the robot with the privacy controller outperforms the robot without the privacy controller in privacy-awareness, trustworthiness, and social-awareness. We conclude that the integration of privacy controllers in authentic human-robot conversations can allow for more trustworthy robots. This initial privacy controller will serve as a foundation for more complex solutions.