 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElements of Robot Morphology: Supporting Designers in Robot Form Exploration
Feb 09, 2026Robot morphology, the form, shape, and structure of robots, is a key design space in human-robot interaction (HRI), shaping how robots function, express themselves, and interact with people. Yet, despite its importance, little is known about how design frameworks can guide systematic form exploration. To address this gap, we introduce Elements of Robot Morphology, a framework that identifies five fundamental elements: perception, articulation, end effectors, locomotion, and structure. Derived from an analysis of existing robots, the framework supports structured exploration of diverse robot forms. To operationalize the framework, we developed Morphology Exploration Blocks (MEB), a set of tangible blocks that enable hands-on, collaborative experimentation with robot morphologies. We evaluate the framework and toolkit through a case study and design workshops, showing how they support analysis, ideation, reflection, and collaborative robot design.
An Improved Convolutional Neural Network System for Automatically Detecting Rebar in GPR Data
Jul 23, 2019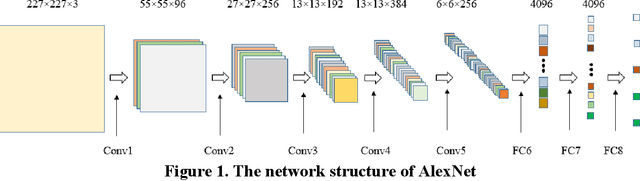
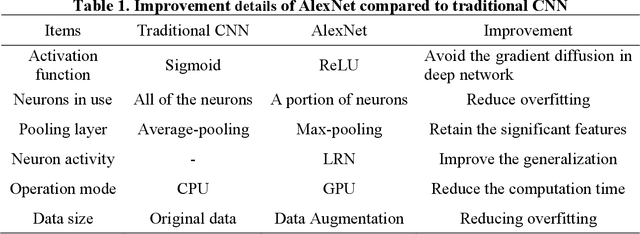
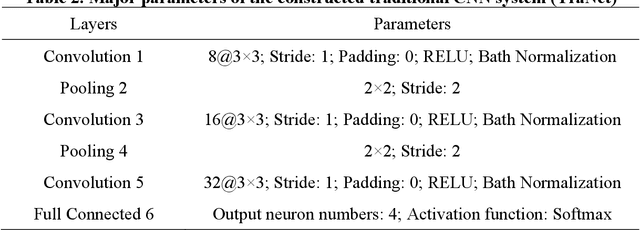
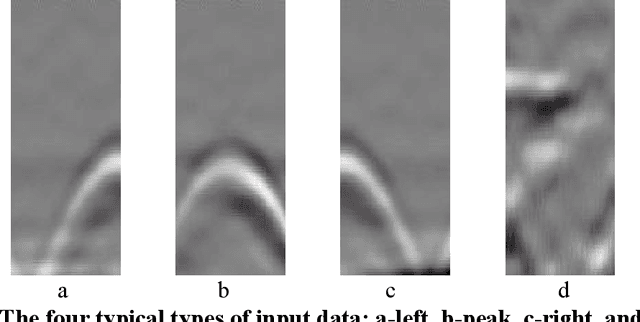
As a mature technology, Ground Penetration Radar (GPR) is now widely employed in detecting rebar and other embedded elements in concrete structures. Manually recognizing rebar from GPR data is a time-consuming and error-prone procedure. Although there are several approaches to automatically detect rebar, it is still challenging to find a high resolution and efficient method for different rebar arrangements, especially for closely spaced rebar meshes. As an improved Convolution Neural Network (CNN), AlexNet shows superiority over traditional methods in image recognition domain. Thus, this paper introduces AlexNet as an alternative solution for automatically detecting rebar within GPR data. In order to show the efficiency of the proposed approach, a traditional CNN is built as the comparative option. Moreover, this research evaluates the impacts of different rebar arrangements and different window sizes on the accuracy of results. The results revealed that: (1) AlexNet outperforms the traditional CNN approach, and its superiority is more notable when the rebar meshes are densely distributed; (2) the detection accuracy significantly varies with changing the size of splitting window, and a proper window should contain enough information about rebar; (3) uniformly and sparsely distributed rebar meshes are more recognizable than densely or unevenly distributed items, due to lower chances of signal interferences.