 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Language Models as a Source of Rewards
Dec 14, 2023



Building generalist agents that can accomplish many goals in rich open-ended environments is one of the research frontiers for reinforcement learning. A key limiting factor for building generalist agents with RL has been the need for a large number of reward functions for achieving different goals. We investigate the feasibility of using off-the-shelf vision-language models, or VLMs, as sources of rewards for reinforcement learning agents. We show how rewards for visual achievement of a variety of language goals can be derived from the CLIP family of models, and used to train RL agents that can achieve a variety of language goals. We showcase this approach in two distinct visual domains and present a scaling trend showing how larger VLMs lead to more accurate rewards for visual goal achievement, which in turn produces more capable RL agents.
DiscoBAX: Discovery of Optimal Intervention Sets in Genomic Experiment Design
Dec 07, 2023The discovery of therapeutics to treat genetically-driven pathologies relies on identifying genes involved in the underlying disease mechanisms. Existing approaches search over the billions of potential interventions to maximize the expected influence on the target phenotype. However, to reduce the risk of failure in future stages of trials, practical experiment design aims to find a set of interventions that maximally change a target phenotype via diverse mechanisms. We propose DiscoBAX, a sample-efficient method for maximizing the rate of significant discoveries per experiment while simultaneously probing for a wide range of diverse mechanisms during a genomic experiment campaign. We provide theoretical guarantees of approximate optimality under standard assumptions, and conduct a comprehensive experimental evaluation covering both synthetic as well as real-world experimental design tasks. DiscoBAX outperforms existing state-of-the-art methods for experimental design, selecting effective and diverse perturbations in biological systems.
The Statistical Benefits of Quantile Temporal-Difference Learning for Value Estimation
May 28, 2023



We study the problem of temporal-difference-based policy evaluation in reinforcement learning. In particular, we analyse the use of a distributional reinforcement learning algorithm, quantile temporal-difference learning (QTD), for this task. We reach the surprising conclusion that even if a practitioner has no interest in the return distribution beyond the mean, QTD (which learns predictions about the full distribution of returns) may offer performance superior to approaches such as classical TD learning, which predict only the mean return, even in the tabular setting.
Deep Reinforcement Learning with Plasticity Injection
May 24, 2023A growing body of evidence suggests that neural networks employed in deep reinforcement learning (RL) gradually lose their plasticity, the ability to learn from new data; however, the analysis and mitigation of this phenomenon is hampered by the complex relationship between plasticity, exploration, and performance in RL. This paper introduces plasticity injection, a minimalistic intervention that increases the network plasticity without changing the number of trainable parameters or biasing the predictions. The applications of this intervention are two-fold: first, as a diagnostic tool $\unicode{x2014}$ if injection increases the performance, we may conclude that an agent's network was losing its plasticity. This tool allows us to identify a subset of Atari environments where the lack of plasticity causes performance plateaus, motivating future studies on understanding and combating plasticity loss. Second, plasticity injection can be used to improve the computational efficiency of RL training if the agent has to re-learn from scratch due to exhausted plasticity or by growing the agent's network dynamically without compromising performance. The results on Atari show that plasticity injection attains stronger performance compared to alternative methods while being computationally efficient.
Understanding plasticity in neural networks
Mar 02, 2023Plasticity, the ability of a neural network to quickly change its predictions in response to new information, is essential for the adaptability and robustness of deep reinforcement learning systems. Deep neural networks are known to lose plasticity over the course of training even in relatively simple learning problems, but the mechanisms driving this phenomenon are still poorly understood. This paper conducts a systematic empirical analysis into plasticity loss, with the goal of understanding the phenomenon mechanistically in order to guide the future development of targeted solutions. We find that loss of plasticity is deeply connected to changes in the curvature of the loss landscape, but that it typically occurs in the absence of saturated units or divergent gradient norms. Based on this insight, we identify a number of parameterization and optimization design choices which enable networks to better preserve plasticity over the course of training. We validate the utility of these findings in larger-scale learning problems by applying the best-performing intervention, layer normalization, to a deep RL agent trained on the Arcade Learning Environment.
Generalization Through the Lens of Learning Dynamics
Dec 11, 2022A machine learning (ML) system must learn not only to match the output of a target function on a training set, but also to generalize to novel situations in order to yield accurate predictions at deployment. In most practical applications, the user cannot exhaustively enumerate every possible input to the model; strong generalization performance is therefore crucial to the development of ML systems which are performant and reliable enough to be deployed in the real world. While generalization is well-understood theoretically in a number of hypothesis classes, the impressive generalization performance of deep neural networks has stymied theoreticians. In deep reinforcement learning (RL), our understanding of generalization is further complicated by the conflict between generalization and stability in widely-used RL algorithms. This thesis will provide insight into generalization by studying the learning dynamics of deep neural networks in both supervised and reinforcement learning tasks.
Understanding Self-Predictive Learning for Reinforcement Learning
Dec 06, 2022



We study the learning dynamics of self-predictive learning for reinforcement learning, a family of algorithms that learn representations by minimizing the prediction error of their own future latent representations. Despite its recent empirical success, such algorithms have an apparent defect: trivial representations (such as constants) minimize the prediction error, yet it is obviously undesirable to converge to such solutions. Our central insight is that careful designs of the optimization dynamics are critical to learning meaningful representations. We identify that a faster paced optimization of the predictor and semi-gradient updates on the representation, are crucial to preventing the representation collapse. Then in an idealized setup, we show self-predictive learning dynamics carries out spectral decomposition on the state transition matrix, effectively capturing information of the transition dynamics. Building on the theoretical insights, we propose bidirectional self-predictive learning, a novel self-predictive algorithm that learns two representations simultaneously. We examine the robustness of our theoretical insights with a number of small-scale experiments and showcase the promise of the novel representation learning algorithm with large-scale experiments.
Learning Dynamics and Generalization in Reinforcement Learning
Jun 05, 2022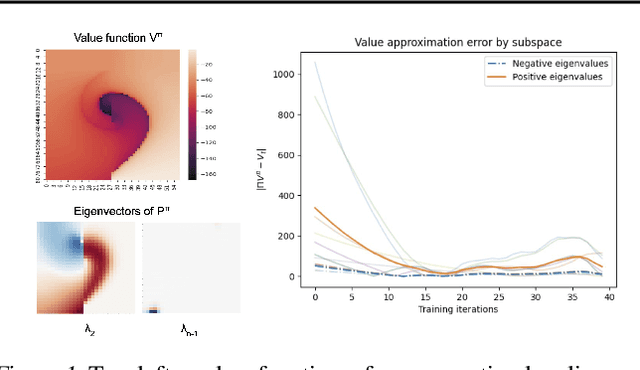
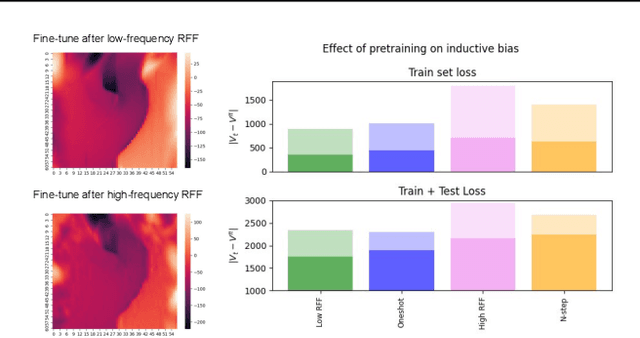
Solving a reinforcement learning (RL) problem poses two competing challenges: fitting a potentially discontinuous value function, and generalizing well to new observations. In this paper, we analyze the learning dynamics of temporal difference algorithms to gain novel insight into the tension between these two objectives. We show theoretically that temporal difference learning encourages agents to fit non-smooth components of the value function early in training, and at the same time induces the second-order effect of discouraging generalization. We corroborate these findings in deep RL agents trained on a range of environments, finding that neural networks trained using temporal difference algorithms on dense reward tasks exhibit weaker generalization between states than randomly initialized networks and networks trained with policy gradient methods. Finally, we investigate how post-training policy distillation may avoid this pitfall, and show that this approach improves generalization to novel environments in the ProcGen suite and improves robustness to input perturbations.
Understanding and Preventing Capacity Loss in Reinforcement Learning
Apr 20, 2022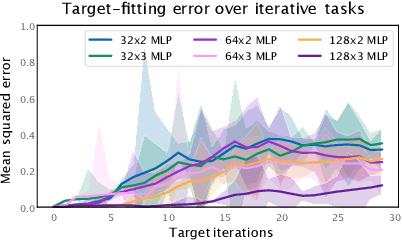
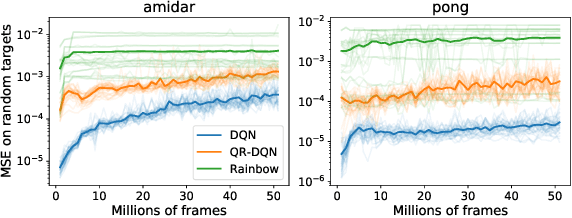

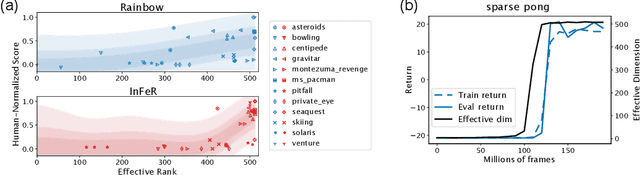
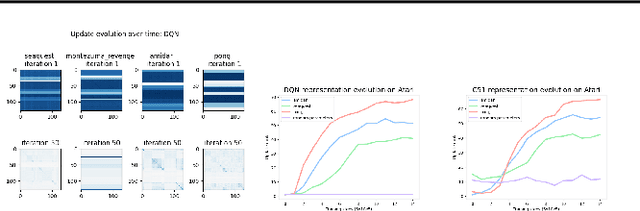
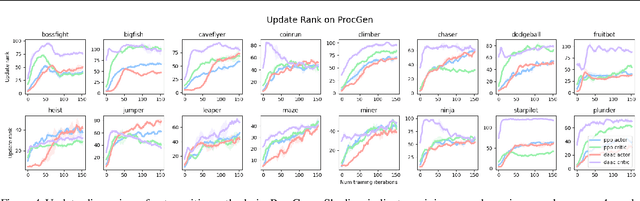
The reinforcement learning (RL) problem is rife with sources of non-stationarity, making it a notoriously difficult problem domain for the application of neural networks. We identify a mechanism by which non-stationary prediction targets can prevent learning progress in deep RL agents: \textit{capacity loss}, whereby networks trained on a sequence of target values lose their ability to quickly update their predictions over time. We demonstrate that capacity loss occurs in a range of RL agents and environments, and is particularly damaging to performance in sparse-reward tasks. We then present a simple regularizer, Initial Feature Regularization (InFeR), that mitigates this phenomenon by regressing a subspace of features towards its value at initialization, leading to significant performance improvements in sparse-reward environments such as Montezuma's Revenge. We conclude that preventing capacity loss is crucial to enable agents to maximally benefit from the learning signals they obtain throughout the entire training trajectory.
DARTS without a Validation Set: Optimizing the Marginal Likelihood
Dec 24, 2021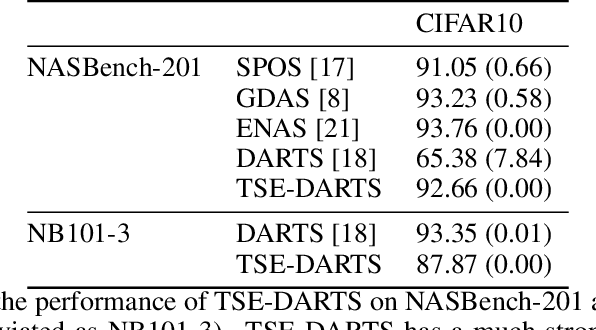
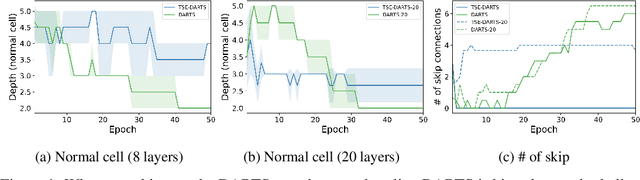
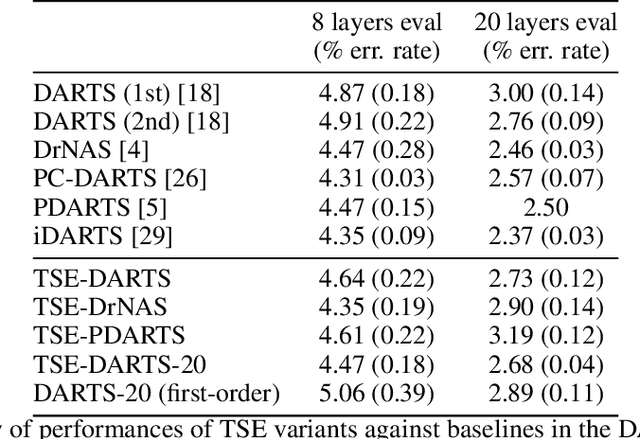
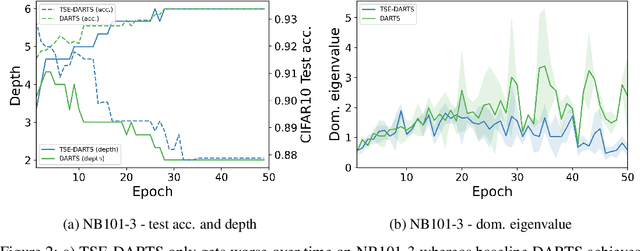
The success of neural architecture search (NAS) has historically been limited by excessive compute requirements. While modern weight-sharing NAS methods such as DARTS are able to finish the search in single-digit GPU days, extracting the final best architecture from the shared weights is notoriously unreliable. Training-Speed-Estimate (TSE), a recently developed generalization estimator with a Bayesian marginal likelihood interpretation, has previously been used in place of the validation loss for gradient-based optimization in DARTS. This prevents the DARTS skip connection collapse, which significantly improves performance on NASBench-201 and the original DARTS search space. We extend those results by applying various DARTS diagnostics and show several unusual behaviors arising from not using a validation set. Furthermore, our experiments yield concrete examples of the depth gap and topology selection in DARTS having a strongly negative impact on the search performance despite generally receiving limited attention in the literature compared to the operations selection.