 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiSync: Spatio-Temporally Aligning Hand Motion from Wearable IMU and On-Robot Camera for Command Source Identification in Long-Range HRI
Mar 12, 2026Long-range Human-Robot Interaction (HRI) remains underexplored. Within it, Command Source Identification (CSI) - determining who issued a command - is especially challenging due to multi-user and distance-induced sensor ambiguity. We introduce HiSync, an optical-inertial fusion framework that treats hand motion as binding cues by aligning robot-mounted camera optical flow with hand-worn IMU signals. We first elicit a user-defined (N=12) gesture set and collect a multimodal command gesture dataset (N=38) in long-range multi-user HRI scenarios. Next, HiSync extracts frequency-domain hand motion features from both camera and IMU data, and a learned CSINet denoises IMU readings, temporally aligns modalities, and performs distance-aware multi-window fusion to compute cross-modal similarity of subtle, natural gestures, enabling robust CSI. In three-person scenes up to 34m, HiSync achieves 92.32% CSI accuracy, outperforming the prior SOTA by 48.44%. HiSync is also validated on real-robot deployment. By making CSI reliable and natural, HiSync provides a practical primitive and design guidance for public-space HRI.
CORE4D: A 4D Human-Object-Human Interaction Dataset for Collaborative Object REarrangement
Jun 27, 2024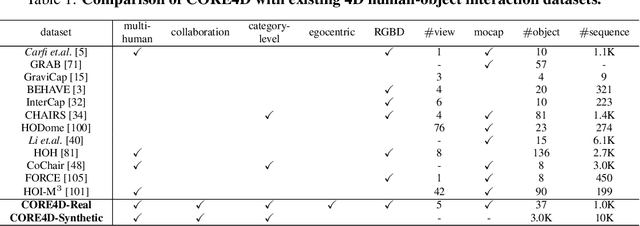



Understanding how humans cooperatively rearrange household objects is critical for VR/AR and human-robot interaction. However, in-depth studies on modeling these behaviors are under-researched due to the lack of relevant datasets. We fill this gap by presenting CORE4D, a novel large-scale 4D human-object-human interaction dataset focusing on collaborative object rearrangement, which encompasses diverse compositions of various object geometries, collaboration modes, and 3D scenes. With 1K human-object-human motion sequences captured in the real world, we enrich CORE4D by contributing an iterative collaboration retargeting strategy to augment motions to a variety of novel objects. Leveraging this approach, CORE4D comprises a total of 11K collaboration sequences spanning 3K real and virtual object shapes. Benefiting from extensive motion patterns provided by CORE4D, we benchmark two tasks aiming at generating human-object interaction: human-object motion forecasting and interaction synthesis. Extensive experiments demonstrate the effectiveness of our collaboration retargeting strategy and indicate that CORE4D has posed new challenges to existing human-object interaction generation methodologies. Our dataset and code are available at https://github.com/leolyliu/CORE4D-Instructions.