 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMineInsight: A Multi-sensor Dataset for Humanitarian Demining Robotics in Off-Road Environments
Jun 05, 2025The use of robotics in humanitarian demining increasingly involves computer vision techniques to improve landmine detection capabilities. However, in the absence of diverse and realistic datasets, the reliable validation of algorithms remains a challenge for the research community. In this paper, we introduce MineInsight, a publicly available multi-sensor, multi-spectral dataset designed for off-road landmine detection. The dataset features 35 different targets (15 landmines and 20 commonly found objects) distributed along three distinct tracks, providing a diverse and realistic testing environment. MineInsight is, to the best of our knowledge, the first dataset to integrate dual-view sensor scans from both an Unmanned Ground Vehicle and its robotic arm, offering multiple viewpoints to mitigate occlusions and improve spatial awareness. It features two LiDARs, as well as images captured at diverse spectral ranges, including visible (RGB, monochrome), visible short-wave infrared (VIS-SWIR), and long-wave infrared (LWIR). Additionally, the dataset comes with an estimation of the location of the targets, offering a benchmark for evaluating detection algorithms. We recorded approximately one hour of data in both daylight and nighttime conditions, resulting in around 38,000 RGB frames, 53,000 VIS-SWIR frames, and 108,000 LWIR frames. MineInsight serves as a benchmark for developing and evaluating landmine detection algorithms. Our dataset is available at https://github.com/mariomlz99/MineInsight.
Development of Ultra-Portable 3D Mapping Systems for Emergency Services
May 06, 2024



Miniaturization of cameras and LiDAR sensors has enabled the development of wearable 3D mapping systems for emergency responders. These systems have the potential to revolutionize response capabilities by providing real-time, high-fidelity maps of dynamic and hazardous environments. We present our recent efforts towards the development of such ultra-portable 3D mapping systems. We review four different sensor configurations, either helmet-mounted or body-worn, with two different mapping algorithms that were implemented and evaluated during field trials. The paper discusses the experimental results with the aim to stimulate further discussion within the portable 3D mapping research community.
Simultaneous Measurement Imputation and Outcome Prediction for Achilles Tendon Rupture Rehabilitation
Sep 08, 2018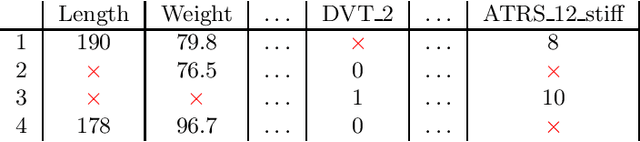
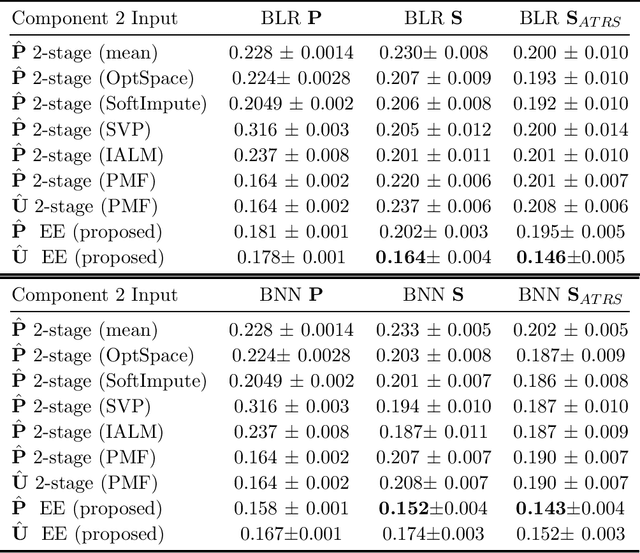
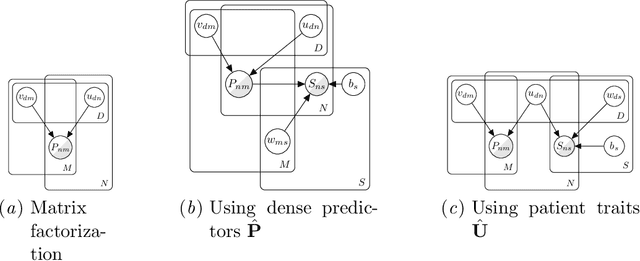
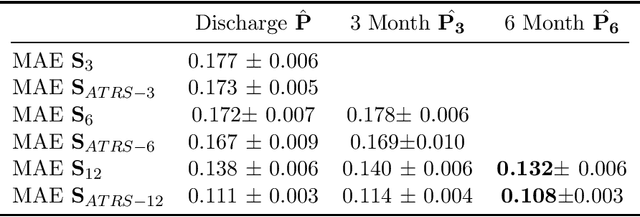
Achilles Tendon Rupture (ATR) is one of the typical soft tissue injuries. Rehabilitation after such a musculoskeletal injury remains a prolonged process with a very variable outcome. Accurately predicting rehabilitation outcome is crucial for treatment decision support. However, it is challenging to train an automatic method for predicting ATR rehabilitation outcome from treatment data, due to a massive amount of missing data in the data recorded from ATR patients, as well as complex nonlinear relations between measurements and outcomes. In this work, we design an end-to-end probabilistic framework to impute missing data entries and predict rehabilitation outcomes simultaneously. We evaluate our model on a real-life ATR clinical cohort, comparing with various baselines. The proposed method demonstrates its clear superiority over traditional methods which typically perform imputation and prediction in two separate stages.