 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging the Evaluation Gap: Standardized Benchmarks for Multi-Objective Search
Mar 25, 2026Empirical evaluation in multi-objective search (MOS) has historically suffered from fragmentation, relying on heterogeneous problem instances with incompatible objective definitions that make cross-study comparisons difficult. This standardization gap is further exacerbated by the realization that DIMACS road networks, a historical default benchmark for the field, exhibit highly correlated objectives that fail to capture diverse Pareto-front structures. To address this, we introduce the first comprehensive, standardized benchmark suite for exact and approximate MOS. Our suite spans four structurally diverse domains: real-world road networks, structured synthetic graphs, game-based grid environments, and high-dimensional robotic motion-planning roadmaps. By providing fixed graph instances, standardized start-goal queries, and both exact and approximate reference Pareto-optimal solution sets, this suite captures a full spectrum of objective interactions: from strongly correlated to strictly independent. Ultimately, this benchmark provides a common foundation to ensure future MOS evaluations are robust, reproducible, and structurally comprehensive.
Active Inference and Behavior Trees for Reactive Action Planning and Execution in Robotics
Nov 19, 2020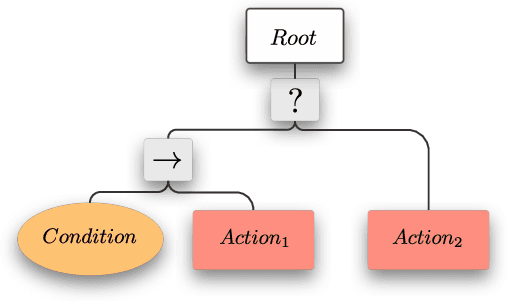
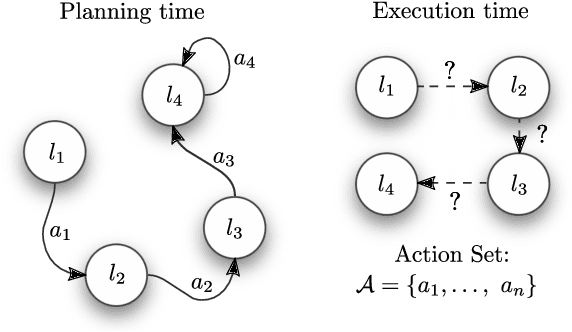
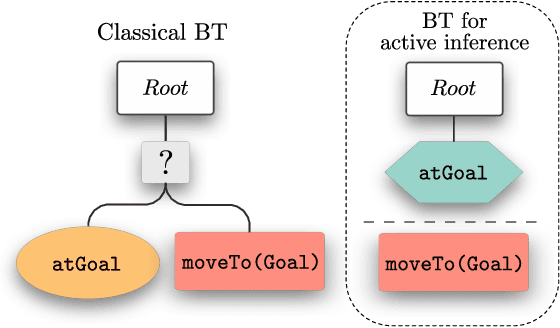
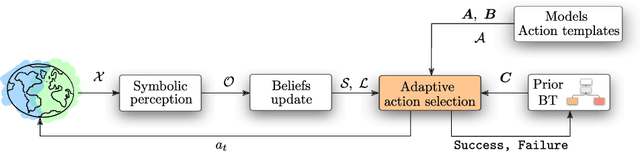
This paper presents how the hybrid combination of behavior trees and the neuroscientific principle of active inference can be used for action planning and execution for reactive robot behaviors in dynamic environments. We show how complex robotic tasks can be formulated as a free-energy minimisation problem, and how state estimation and symbolic decision making are handled within the same framework. The general behavior is specified offline through behavior trees, where the leaf nodes represent desired states, not actions as in classical behavior trees. The decision of which action to execute to reach a state is left to the online active inference routine, in order to resolve unexpected contingencies. This hybrid combination improves the robustness of plans specified through behavior trees, while allowing to cope with the curse of dimensionality in active inference. The properties of the proposed algorithm are analysed in terms of robustness and convergence, and the theoretical results are validated using a mobile manipulator in a retail environment.
A Novel Adaptive Controller for Robot Manipulators based on Active Inference
Sep 27, 2019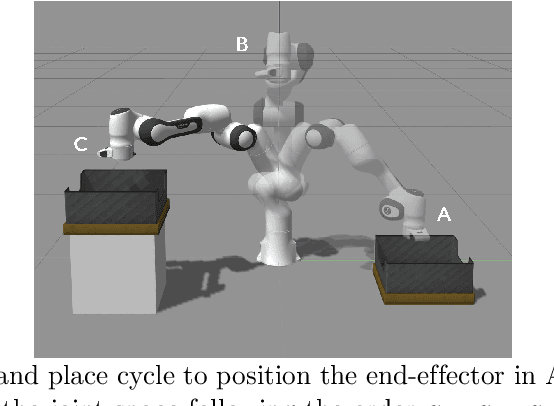
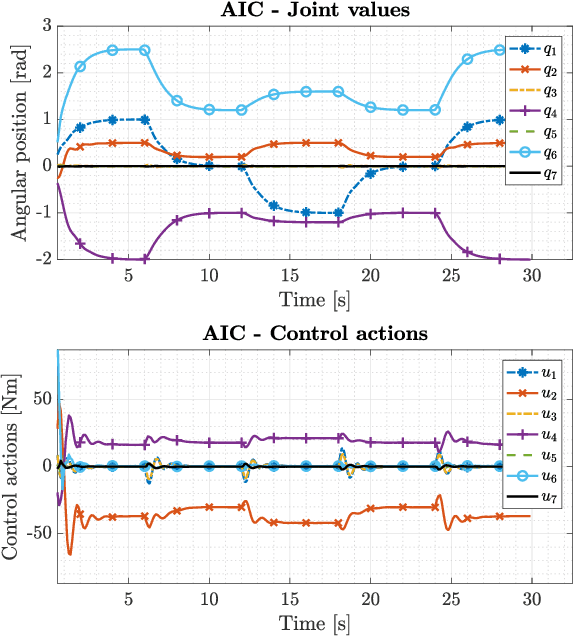
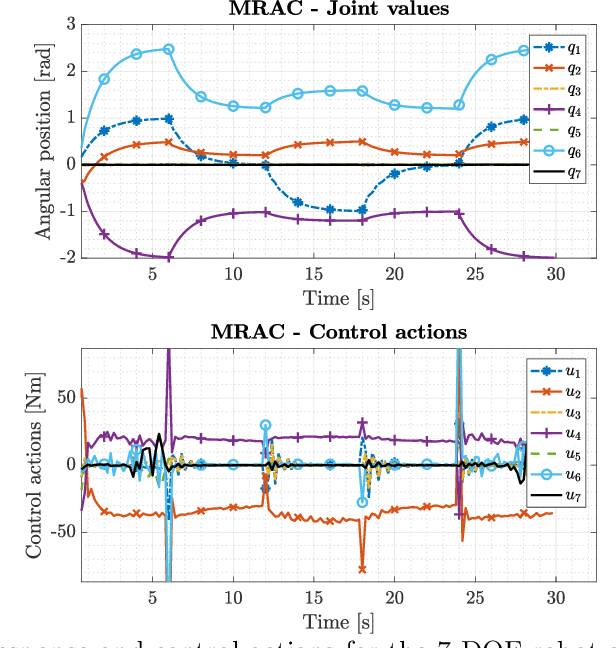
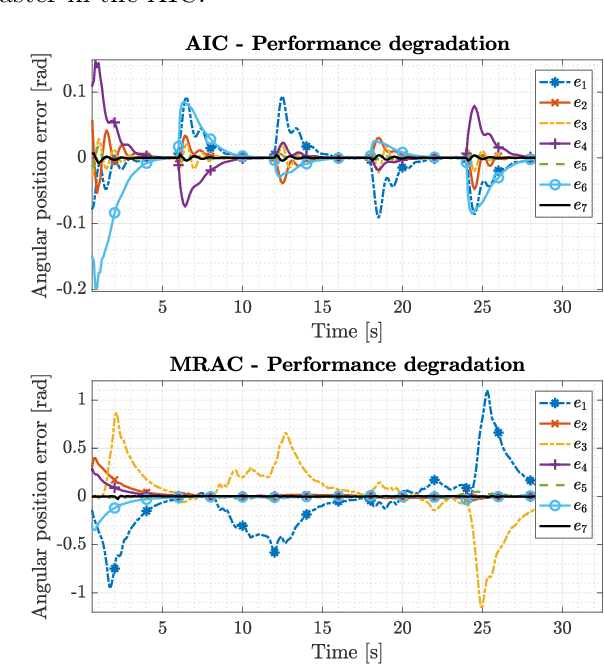
More adaptive controllers for robot manipulators are needed, which can deal with large model uncertainties. This paper presents a novel active inference controller (AIC) as an adaptive control scheme for industrial robots. This scheme is easily scalable to high degrees-of-freedom, and it maintains high performance even in the presence of large unmodeled dynamics. The proposed method is based on active inference, a promising neuroscientific theory of the brain, which describes a biologically plausible algorithm for perception and action. In this work, we formulate active inference from a control perspective, deriving a model-free control law which is less sensitive to unmodeled dynamics. The performance and the adaptive properties of the algorithm are compared to a state-of-the-art model reference adaptive controller (MRAC) in an experimental setup with a real 7-DOF robot arm. The results showed that the AIC outperformed the MRAC in terms of adaptability, providing a more general control law for robot manipulators. This confirmed the relevance of active inference for robot control.
Automatic Algorithm Selection In Multi-agent Pathfinding
Jun 15, 2019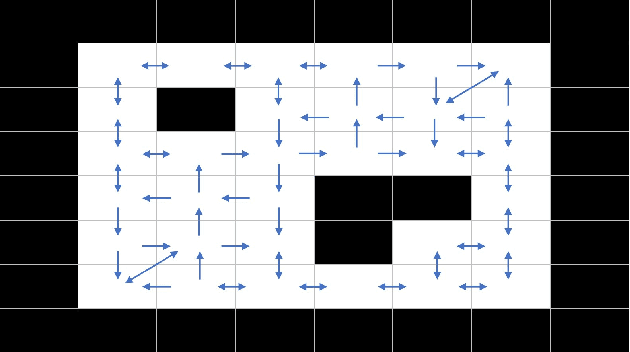

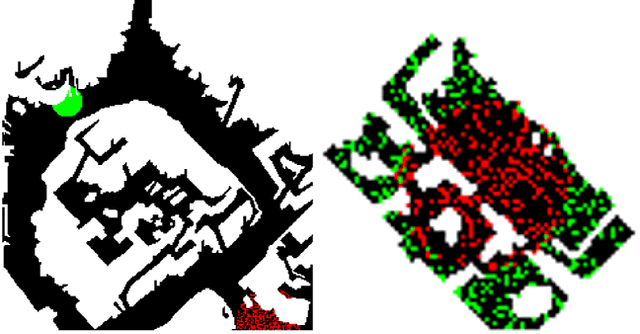
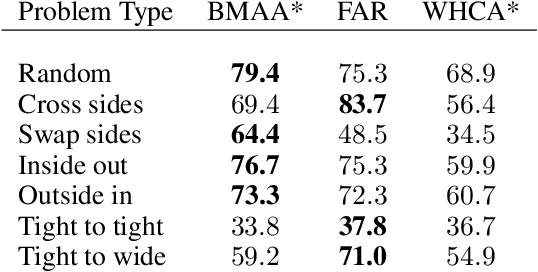
In a multi-agent pathfinding (MAPF) problem, agents need to navigate from their start to their goal locations without colliding into each other. There are various MAPF algorithms, including Windowed Hierarchical Cooperative A*, Flow Annotated Replanning, and Bounded Multi-Agent A*. It is often the case that there is no a single algorithm that dominates all MAPF instances. Therefore, in this paper, we investigate the use of deep learning to automatically select the best MAPF algorithm from a portfolio of algorithms for a given MAPF problem instance. Empirical results show that our automatic algorithm selection approach, which uses an off-the-shelf convolutional neural network, is able to outperform any individual MAPF algorithm in our portfolio.
Team Delft's Robot Winner of the Amazon Picking Challenge 2016
Oct 18, 2016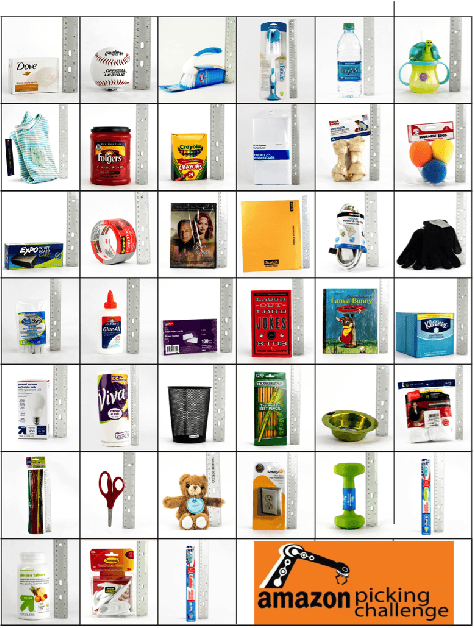
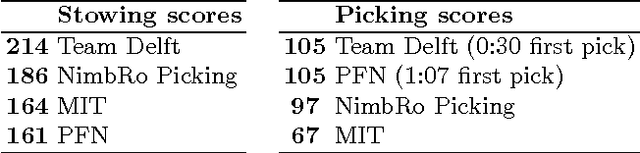
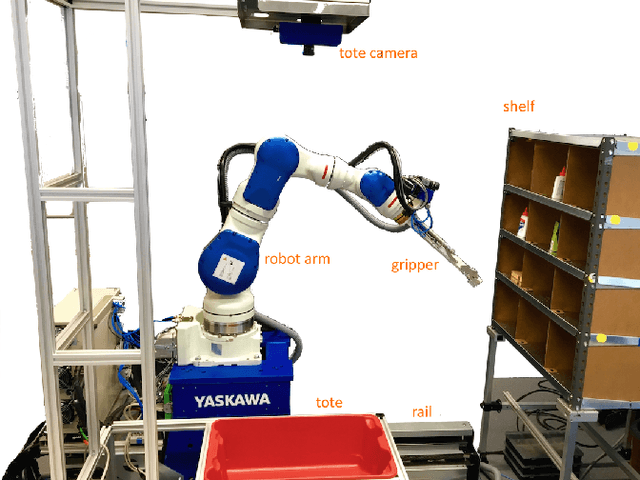
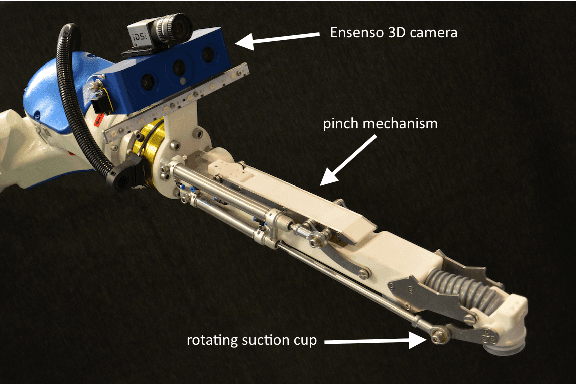
This paper describes Team Delft's robot, which won the Amazon Picking Challenge 2016, including both the Picking and the Stowing competitions. The goal of the challenge is to automate pick and place operations in unstructured environments, specifically the shelves in an Amazon warehouse. Team Delft's robot is based on an industrial robot arm, 3D cameras and a customized gripper. The robot's software uses ROS to integrate off-the-shelf components and modules developed specifically for the competition, implementing Deep Learning and other AI techniques for object recognition and pose estimation, grasp planning and motion planning. This paper describes the main components in the system, and discusses its performance and results at the Amazon Picking Challenge 2016 finals.