 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExpert Consensus-based Video-Based Assessment Tool for Workflow Analysis in Minimally Invasive Colorectal Surgery: Development and Validation of ColoWorkflow
Nov 13, 2025



Minimally invasive colorectal surgery is characterized by procedural variability, a difficult learning curve, and complications that impact quality and outcomes. Video-based assessment (VBA) offers an opportunity to generate data-driven insights to reduce variability, optimize training, and improve surgical performance. However, existing tools for workflow analysis remain difficult to standardize and implement. This study aims to develop and validate a VBA tool for workflow analysis across minimally invasive colorectal procedures. A Delphi process was conducted to achieve consensus on generalizable workflow descriptors. The resulting framework informed the development of a new VBA tool, ColoWorkflow. Independent raters then applied ColoWorkflow to a multicentre video dataset of laparoscopic and robotic colorectal surgery (CRS). Applicability and inter-rater reliability were evaluated. Consensus was achieved for 10 procedure-agnostic phases and 34 procedure-specific steps describing CRS workflows. ColoWorkflow was developed and applied to 54 colorectal operative videos (left and right hemicolectomies, sigmoid and rectosigmoid resections, and total proctocolectomies) from five centres. The tool demonstrated broad applicability, with all but one label utilized. Inter-rater reliability was moderate, with mean Cohen's K of 0.71 for phases and 0.66 for steps. Most discrepancies arose at phase transitions and step boundary definitions. ColoWorkflow is the first consensus-based, validated VBA tool for comprehensive workflow analysis in minimally invasive CRS. It establishes a reproducible framework for video-based performance assessment, enabling benchmarking across institutions and supporting the development of artificial intelligence-driven workflow recognition. Its adoption may standardize training, accelerate competency acquisition, and advance data-informed surgical quality improvement.
From Forks to Forceps: A New Framework for Instance Segmentation of Surgical Instruments
Nov 26, 2022



Minimally invasive surgeries and related applications demand surgical tool classification and segmentation at the instance level. Surgical tools are similar in appearance and are long, thin, and handled at an angle. The fine-tuning of state-of-the-art (SOTA) instance segmentation models trained on natural images for instrument segmentation has difficulty discriminating instrument classes. Our research demonstrates that while the bounding box and segmentation mask are often accurate, the classification head mis-classifies the class label of the surgical instrument. We present a new neural network framework that adds a classification module as a new stage to existing instance segmentation models. This module specializes in improving the classification of instrument masks generated by the existing model. The module comprises multi-scale mask attention, which attends to the instrument region and masks the distracting background features. We propose training our classifier module using metric learning with arc loss to handle low inter-class variance of surgical instruments. We conduct exhaustive experiments on the benchmark datasets EndoVis2017 and EndoVis2018. We demonstrate that our method outperforms all (more than 18) SOTA methods compared with, and improves the SOTA performance by at least 12 points (20%) on the EndoVis2017 benchmark challenge and generalizes effectively across the datasets.
Neuro-Endo-Trainer-Online Assessment System (NET-OAS) for Neuro-Endoscopic Skills Training
Jul 16, 2020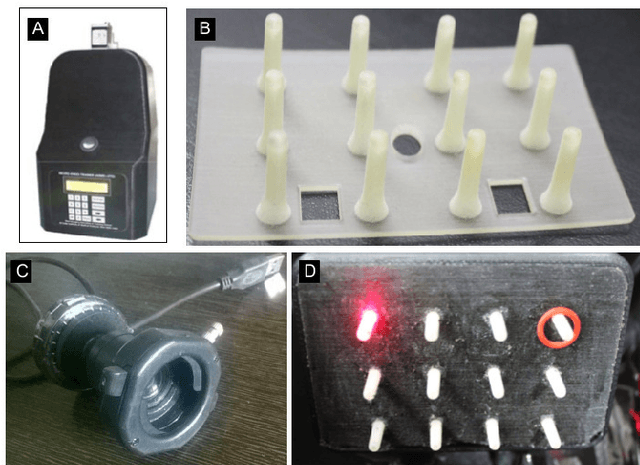
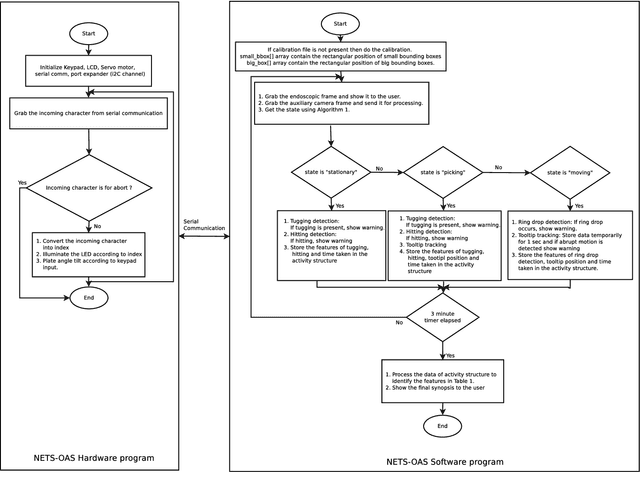
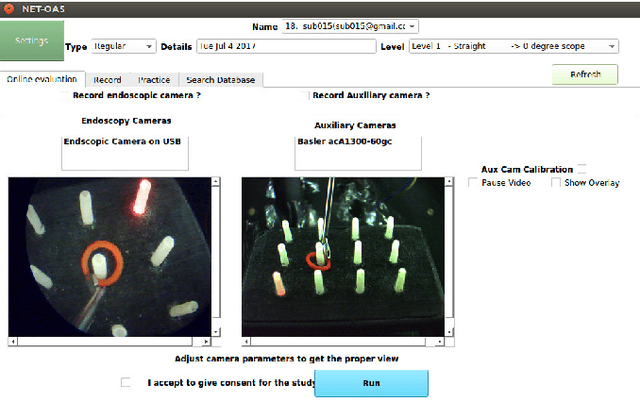
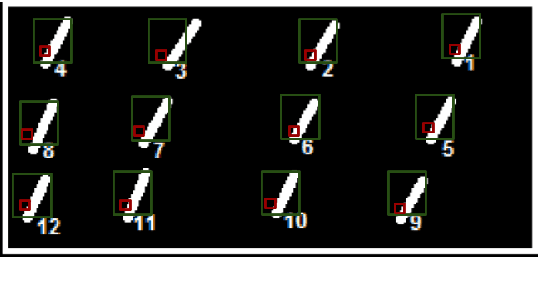
Neuro-endoscopy is a challenging minimally invasive neurosurgery that requires surgical skills to be acquired using training methods different from the existing apprenticeship model. There are various training systems developed for imparting fundamental technical skills in laparoscopy where as limited systems for neuro-endoscopy. Neuro-Endo-Trainer was a box-trainer developed for endo-nasal transsphenoidal surgical skills training with video based offline evaluation system. The objective of the current study was to develop a modified version (Neuro-Endo-Trainer-Online Assessment System (NET-OAS)) by providing a stand-alone system with online evaluation and real-time feedback. The validation study on a group of 15 novice participants shows the improvement in the technical skills for handling the neuro-endoscope and the tool while performing pick and place activity.
* Published at Federated Conference on Computer Science and Information Systems - FedCSIS 2017