 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStiffness Change for Reconfiguration of Inflated Beam Robots
Jul 06, 2023



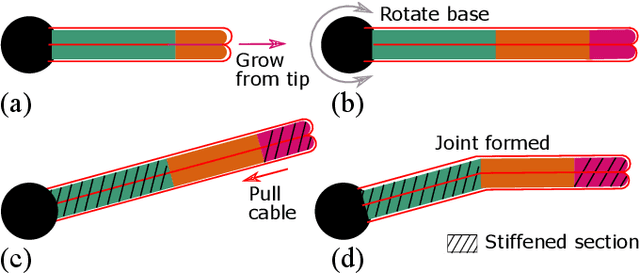
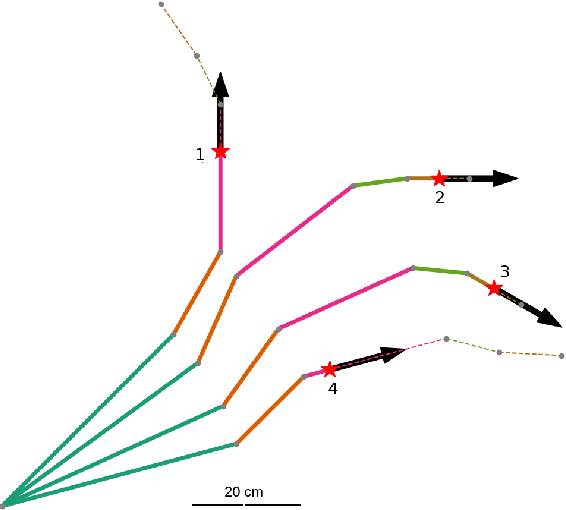
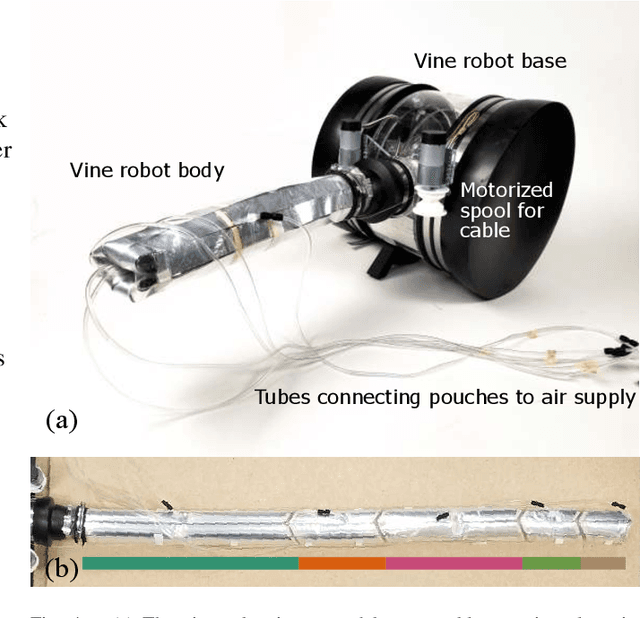
Active control of the shape of soft robots is challenging. Despite having an infinite number of passive degrees of freedom (DOFs), soft robots typically only have a few actively controllable DOFs, limited by the number of degrees of actuation (DOAs). The complexity of actuators restricts the number of DOAs that can be incorporated into soft robots. Active shape control is further complicated by the buckling of soft robots under compressive forces; this is particularly challenging for compliant continuum robots due to their long aspect ratios. In this work, we show how variable stiffness can enable shape control of soft robots by addressing these challenges. Dynamically changing the stiffness of sections along a compliant continuum robot can selectively "activate" discrete joints. By changing which joints are activated, the output of a single actuator can be reconfigured to actively control many different joints, thus decoupling the number of controllable DOFs from the number of DOAs. We demonstrate embedded positive pressure layer jamming as a simple method for stiffness change in inflated beam robots, its compatibility with growing robots, and its use as an "activating" technology. We experimentally characterize the stiffness change in a growing inflated beam robot and present finite element models which serve as guides for robot design and fabrication. We fabricate a multi-segment everting inflated beam robot and demonstrate how stiffness change is compatible with growth through tip eversion, enables an increase in workspace, and achieves new actuation patterns not possible without stiffening.
Passive Shape Locking for Multi-Bend Growing Inflated Beam Robots
Mar 04, 2023



Shape change enables new capabilities for robots. One class of robots capable of dramatic shape change is soft growing "vine" robots. These robots usually feature global actuation methods for bending that limit them to simple, constant-curvature shapes. Achieving more complex "multi-bend" configurations has also been explored but requires choosing the desired configuration ahead of time, exploiting contact with the environment to maintain previous bends, or using pneumatic actuation for shape locking. In this paper, we present a novel design that enables passive, on-demand shape locking. Our design leverages a passive tip mount to apply hook-and-loop fasteners that hold bends without any pneumatic or electrical input. We characterize the robot's kinematics and ability to hold locked bends. We also experimentally evaluate the effect of hook-and-loop fasteners on beam and joint stiffness. Finally, we demonstrate our proof-of-concept prototype in 2D. Our passive shape locking design is a step towards easily reconfigurable robots that are lightweight, low-cost, and low-power.
A Lightweight, High-Extension, Planar 3-Degree-of-Freedom Manipulator Using Pinched Bistable Tapes
Oct 19, 2021



To facilitate sensing and physical interaction in remote and/or constrained environments, high-extension, lightweight robot manipulators are easier to transport and reach substantially further than traditional serial chain manipulators. We propose a novel planar 3-degree-of-freedom manipulator that achieves low weight and high extension through the use of a pair of spooling bistable tapes, commonly used in self-retracting tape measures, which are pinched together to form a reconfigurable revolute joint. The pinching action flattens the tapes to produce a localized bending region, resulting in a revolute joint that can change its orientation by cable tension and its location on the tapes though friction-driven movement of the pinching mechanism. We present the design, implementation, kinematic modeling, stiffness behavior of the revolute joint, and quasi-static performance of this manipulator. In particular, we demonstrate the ability of the manipulator to reach specified targets in free space, reach a 2D target with various orientations, and maintain an end-effector angle or stationary bending point while changing the other. The long-term goal of this work is to integrate the manipulator with an unmanned aerial vehicle to enable more capable aerial manipulation.
Task-Specific Design Optimization and Fabrication for Inflated-Beam Soft Robots with Growable Discrete Joints
Mar 08, 2021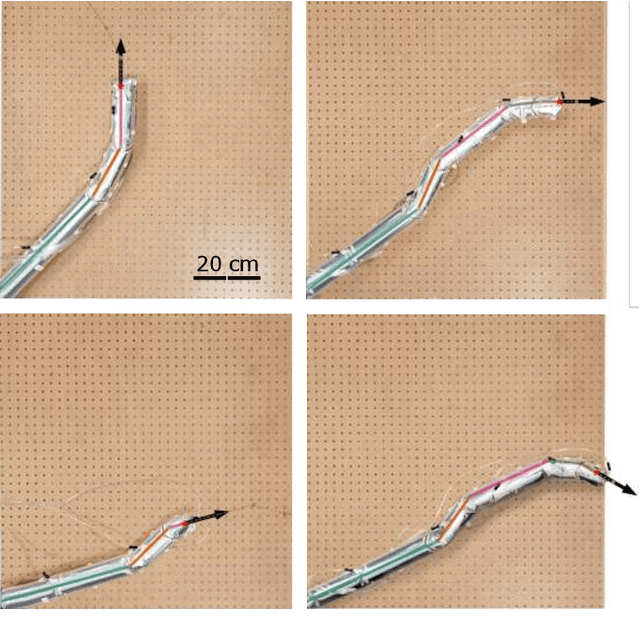
Soft robot serial chain manipulators with the capability for growth, stiffness control, and discrete joints have the potential to approach the dexterity of traditional robot arms, while improving safety, lowering cost, and providing an increased workspace, with potential application in home environments. This paper presents an approach for design optimization of such robots to reach specified targets while minimizing the number of discrete joints and thus construction and actuation costs. We define a maximum number of allowable joints, as well as hardware constraints imposed by the materials and actuation available for soft growing robots, and we formulate and solve an optimization problem to output a robot design, i.e., the total number of potential joints and their locations along the robot body, which reaches all the desired targets. We then rapidly construct the resulting soft growing robot design using readily available, low-cost materials, and we demonstrate its ability to reach the desired targets. Finally, we use our algorithm to evaluate the ability of this design to reach new targets, and we demonstrate the algorithm's utility as a design tool to explore robot capabilities given various constraints and objectives.
Dynamically Reconfigurable Discrete Distributed Stiffness for Inflated Beam Robots
Feb 11, 2020



Inflated continuum robots are promising for a variety of navigation tasks, but controlling their motion with a small number of actuators is challenging. These inflated beam robots tend to buckle under compressive loads, producing extremely tight local curvature at difficult-to-control buckle point locations. In this paper, we present an inflated beam robot that uses distributed stiffness changing sections enabled by positive pressure layer jamming to control or prevent buckling. Passive valves are actuated by an electromagnet carried by an electromechanical device that travels inside the main inflated beam robot body. The valves themselves require no external connections or wiring, allowing the distributed stiffness control to be scaled to long beam lengths. Multiple layer jamming elements are stiffened simultaneously to achieve global stiffening, allowing the robot to support greater cantilevered loads and longer unsupported lengths. Local stiffening, achieved by leaving certain layer jamming elements unstiffened, allows the robot to produce "virtual joints" that dynamically change the robot kinematics. Implementing these stiffening strategies is compatible with growth through tip eversion and tendon-steering, and enables a number of new capabilities for inflated beam robots and tip-everting robots.