 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerative Diffusion Priors for 3D Mapping of the Dark Universe
May 30, 2026Reconstructing the three-dimensional distribution of dark matter from weak-lensing observations is a central but highly ill-posed inverse problem in cosmology. Unlike standard 3D reconstruction with multiple viewpoints, we observe the universe from a single line of sight, through noisy shape distortions of galaxies with uncertain distances, so meaningful recovery of the 3D matter field requires strong prior assumptions. Existing methods either produce point estimates with handcrafted priors or use neural ensembles for approximate Bayesian uncertainty, and struggle to capture the non-Gaussian, filamentary structure of the cosmic web. With the advent of new high-resolution cosmological simulations, we now have an alternative source of prior knowledge that captures the nonlinear statistics of structure formation with far greater fidelity than analytic prescriptions. We leverage these simulations to build a new dataset $\texttt{Conicus3D}$, which enables us to learn a data-driven diffusion-model prior capturing the full 3D distribution of dark matter structure across cosmic time. Building on recent plug-and-play approaches, we modify a diffusion-based posterior sampling scheme to the 3D weak-lensing setting, combining the learned prior with a differentiable physical forward model. On realistic simulations targeting a modern weak lensing survey, our approach yields substantially improved 2D and 3D reconstruction accuracy over baseline methods. Moreover, it produces posterior samples whose statistics closely track the underlying simulations, while remaining robust to moderate shifts in cosmology.
Fourier Feature Pyramids for Physics-Informed Neural Networks
May 22, 2026We present an improved neural field architecture for solving partial differential equations (PDEs). Current physics-informed neural networks (PINNs) provide a flexible framework for solving PDEs, but they struggle to achieve highly accurate solutions and require computation that scales poorly with parameter count. Our model, which we call beignet (Bandlimited Embedding with Interpolated Grid Network), replaces the random Fourier feature embedding used by existing PINN models with a trainable multi-resolution Fourier feature pyramid. To query beignet at a continuous coordinate, we use Fourier interpolation at each level of the pyramid to return features at the input coordinate, and then decode this vector with a fully-connected neural network trunk. Our model provides multiple benefits: 1) Spatial derivatives can be computed efficiently by using the chain rule to compose derivatives of the neural network computed with automatic differentiation with derivatives of the feature grid computed spectrally by the Fast Fourier transform (FFT). 2) beignet can achieve higher accuracy in a compute-efficient manner by scaling the parameter count of this Fourier feature pyramid, instead of the less-efficient strategy of scaling the neural network architecture. 3) beignet can directly control the representation bandlimit, resulting in more stable optimization for difficult PDEs. We demonstrate that beignet finds significantly more accurate solutions on PDE benchmarks using fewer parameters than state-of-the-art PINN methods. We further evaluate beignet on the self-similar inviscid Burgers blowup problem and show that it can minimize residuals to near machine precision using Adam, an accuracy regime previously attained only by using computationally expensive higher-order optimizers.
Mapping Dark-Matter Clusters via Physics-Guided Diffusion Models
Mar 15, 2026Galaxy clusters are powerful probes of astrophysics and cosmology through gravitational lensing: the clusters' mass, dominated by 85% dark matter, distorts background light. Yet, mass reconstruction lacks the scalability and large-scale benchmarks to process the hundreds of thousands of clusters expected from forthcoming wide-field surveys. We introduce a fully automated method to reconstruct cluster surface mass density from photometry and gravitational lensing observables. Central to our approach is DarkClusters-15k, our new dataset of 15,000 simulated clusters with paired mass and photometry maps, the largest benchmark to date, spanning multiple redshifts and simulation frameworks. We train a plug-and-play diffusion prior on DarkClusters-15k that learns the statistical relationship between mass and light, and draw posterior samples constrained by weak- and strong-lensing observables; this yields principled reconstructions driven by explicit physics, alongside well-calibrated uncertainties. Our approach requires no expert tuning, runs in minutes rather than hours, achieves higher accuracy, and matches expertly-tuned reconstructions of the MACS 1206 cluster. We release our method and DarkClusters-15k to support development and benchmarking for upcoming wide-field cosmological surveys.
Revealing the 3D Cosmic Web through Gravitationally Constrained Neural Fields
Apr 21, 2025



Weak gravitational lensing is the slight distortion of galaxy shapes caused primarily by the gravitational effects of dark matter in the universe. In our work, we seek to invert the weak lensing signal from 2D telescope images to reconstruct a 3D map of the universe's dark matter field. While inversion typically yields a 2D projection of the dark matter field, accurate 3D maps of the dark matter distribution are essential for localizing structures of interest and testing theories of our universe. However, 3D inversion poses significant challenges. First, unlike standard 3D reconstruction that relies on multiple viewpoints, in this case, images are only observed from a single viewpoint. This challenge can be partially addressed by observing how galaxy emitters throughout the volume are lensed. However, this leads to the second challenge: the shapes and exact locations of unlensed galaxies are unknown, and can only be estimated with a very large degree of uncertainty. This introduces an overwhelming amount of noise which nearly drowns out the lensing signal completely. Previous approaches tackle this by imposing strong assumptions about the structures in the volume. We instead propose a methodology using a gravitationally-constrained neural field to flexibly model the continuous matter distribution. We take an analysis-by-synthesis approach, optimizing the weights of the neural network through a fully differentiable physical forward model to reproduce the lensing signal present in image measurements. We showcase our method on simulations, including realistic simulated measurements of dark matter distributions that mimic data from upcoming telescope surveys. Our results show that our method can not only outperform previous methods, but importantly is also able to recover potentially surprising dark matter structures.
This Looks Like Those: Illuminating Prototypical Concepts Using Multiple Visualizations
Oct 28, 2023We present ProtoConcepts, a method for interpretable image classification combining deep learning and case-based reasoning using prototypical parts. Existing work in prototype-based image classification uses a ``this looks like that'' reasoning process, which dissects a test image by finding prototypical parts and combining evidence from these prototypes to make a final classification. However, all of the existing prototypical part-based image classifiers provide only one-to-one comparisons, where a single training image patch serves as a prototype to compare with a part of our test image. With these single-image comparisons, it can often be difficult to identify the underlying concept being compared (e.g., ``is it comparing the color or the shape?''). Our proposed method modifies the architecture of prototype-based networks to instead learn prototypical concepts which are visualized using multiple image patches. Having multiple visualizations of the same prototype allows us to more easily identify the concept captured by that prototype (e.g., ``the test image and the related training patches are all the same shade of blue''), and allows our model to create richer, more interpretable visual explanations. Our experiments show that our ``this looks like those'' reasoning process can be applied as a modification to a wide range of existing prototypical image classification networks while achieving comparable accuracy on benchmark datasets.
Single View Refractive Index Tomography with Neural Fields
Sep 08, 2023



Refractive Index Tomography is an inverse problem in which we seek to reconstruct a scene's 3D refractive field from 2D projected image measurements. The refractive field is not visible itself, but instead affects how the path of a light ray is continuously curved as it travels through space. Refractive fields appear across a wide variety of scientific applications, from translucent cell samples in microscopy to fields of dark matter bending light from faraway galaxies. This problem poses a unique challenge because the refractive field directly affects the path that light takes, making its recovery a non-linear problem. In addition, in contrast with traditional tomography, we seek to recover the refractive field using a projected image from only a single viewpoint by leveraging knowledge of light sources scattered throughout the medium. In this work, we introduce a method that uses a coordinate-based neural network to model the underlying continuous refractive field in a scene. We then use explicit modeling of rays' 3D spatial curvature to optimize the parameters of this network, reconstructing refractive fields with an analysis-by-synthesis approach. The efficacy of our approach is demonstrated by recovering refractive fields in simulation, and analyzing how recovery is affected by the light source distribution. We then test our method on a simulated dark matter mapping problem, where we recover the refractive field underlying a realistic simulated dark matter distribution.
Mars Image Content Classification: Three Years of NASA Deployment and Recent Advances
Feb 09, 2021
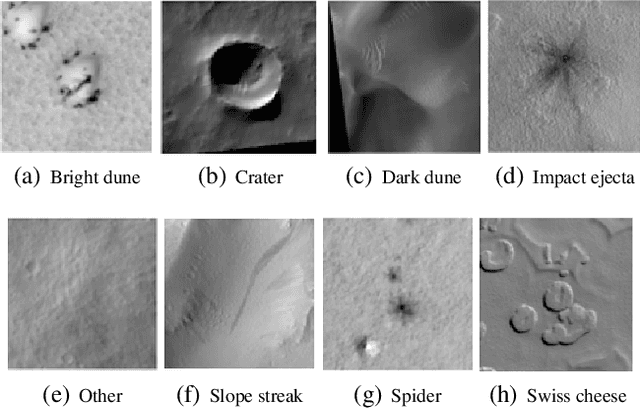
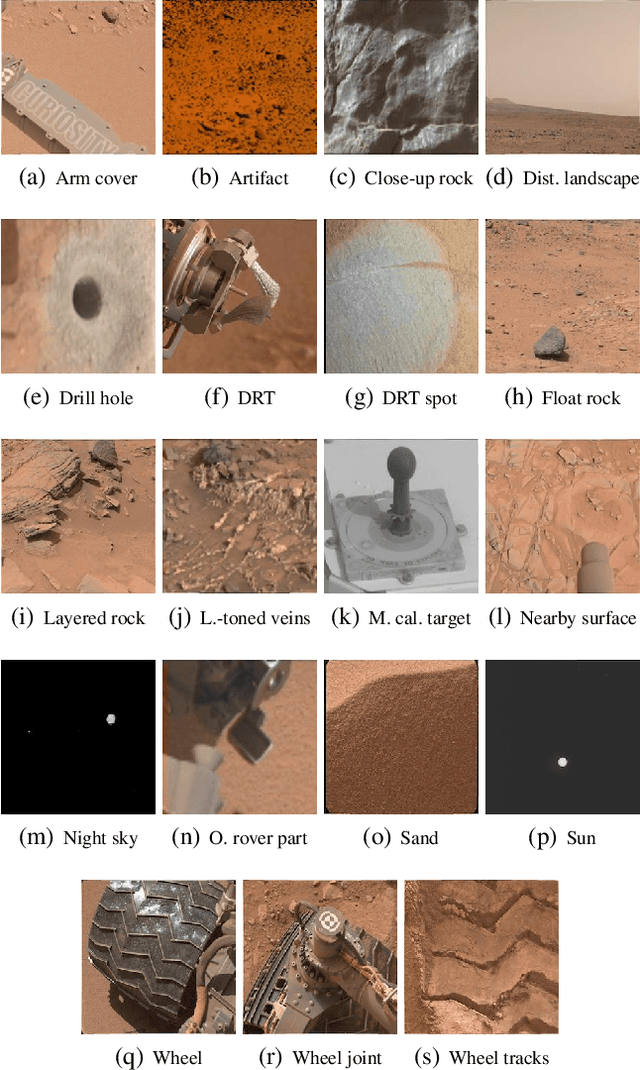
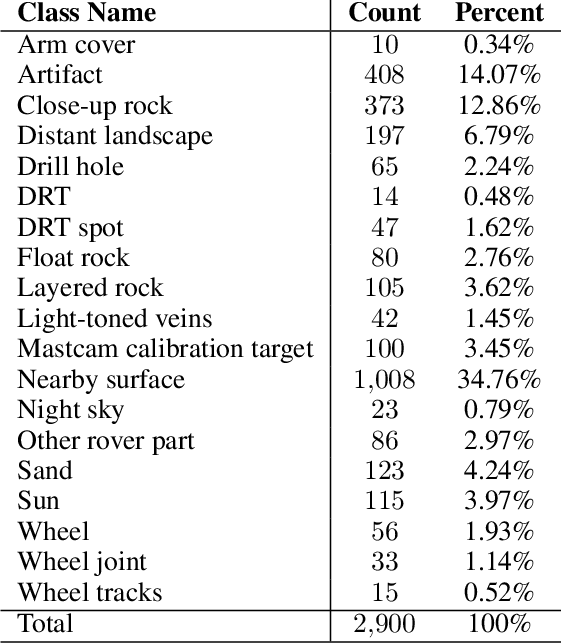
The NASA Planetary Data System hosts millions of images acquired from the planet Mars. To help users quickly find images of interest, we have developed and deployed content-based classification and search capabilities for Mars orbital and surface images. The deployed systems are publicly accessible using the PDS Image Atlas. We describe the process of training, evaluating, calibrating, and deploying updates to two CNN classifiers for images collected by Mars missions. We also report on three years of deployment including usage statistics, lessons learned, and plans for the future.