 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Evolution of Out-of-Distribution Robustness Throughout Fine-Tuning
Jun 30, 2021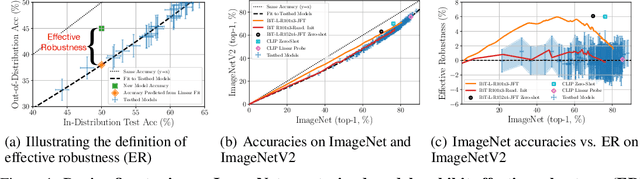
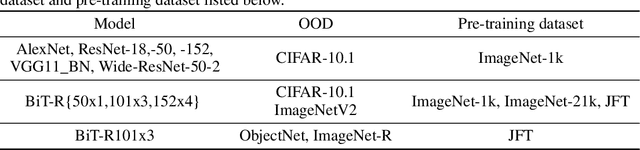
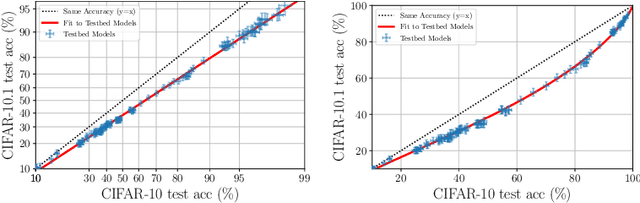
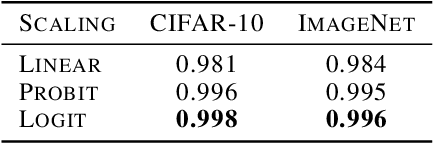
Although machine learning models typically experience a drop in performance on out-of-distribution data, accuracies on in- versus out-of-distribution data are widely observed to follow a single linear trend when evaluated across a testbed of models. Models that are more accurate on the out-of-distribution data relative to this baseline exhibit "effective robustness" and are exceedingly rare. Identifying such models, and understanding their properties, is key to improving out-of-distribution performance. We conduct a thorough empirical investigation of effective robustness during fine-tuning and surprisingly find that models pre-trained on larger datasets exhibit effective robustness during training that vanishes at convergence. We study how properties of the data influence effective robustness, and we show that it increases with the larger size, more diversity, and higher example difficulty of the dataset. We also find that models that display effective robustness are able to correctly classify 10% of the examples that no other current testbed model gets correct. Finally, we discuss several strategies for scaling effective robustness to the high-accuracy regime to improve the out-of-distribution accuracy of state-of-the-art models.
Deep Learning Through the Lens of Example Difficulty
Jun 18, 2021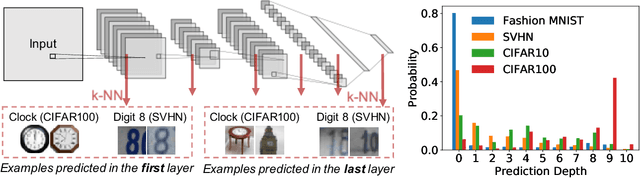

Existing work on understanding deep learning often employs measures that compress all data-dependent information into a few numbers. In this work, we adopt a perspective based on the role of individual examples. We introduce a measure of the computational difficulty of making a prediction for a given input: the (effective) prediction depth. Our extensive investigation reveals surprising yet simple relationships between the prediction depth of a given input and the model's uncertainty, confidence, accuracy and speed of learning for that data point. We further categorize difficult examples into three interpretable groups, demonstrate how these groups are processed differently inside deep models and showcase how this understanding allows us to improve prediction accuracy. Insights from our study lead to a coherent view of a number of separately reported phenomena in the literature: early layers generalize while later layers memorize; early layers converge faster and networks learn easy data and simple functions first.
NeurIPS 2020 Competition: Predicting Generalization in Deep Learning
Dec 14, 2020
Understanding generalization in deep learning is arguably one of the most important questions in deep learning. Deep learning has been successfully adopted to a large number of problems ranging from pattern recognition to complex decision making, but many recent researchers have raised many concerns about deep learning, among which the most important is generalization. Despite numerous attempts, conventional statistical learning approaches have yet been able to provide a satisfactory explanation on why deep learning works. A recent line of works aims to address the problem by trying to predict the generalization performance through complexity measures. In this competition, we invite the community to propose complexity measures that can accurately predict generalization of models. A robust and general complexity measure would potentially lead to a better understanding of deep learning's underlying mechanism and behavior of deep models on unseen data, or shed light on better generalization bounds. All these outcomes will be important for making deep learning more robust and reliable.
When Do Curricula Work?
Dec 05, 2020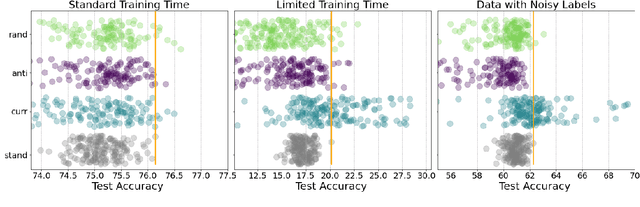
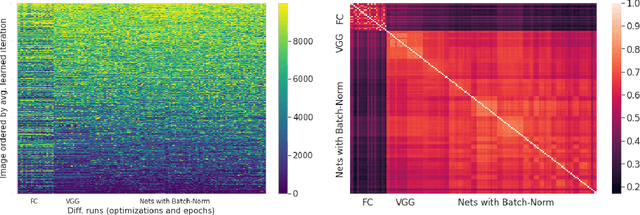
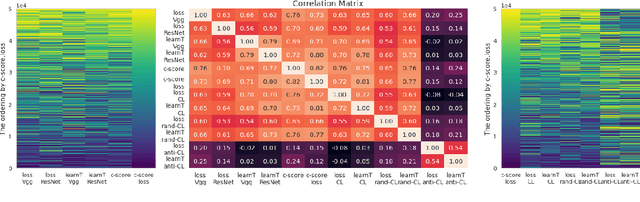
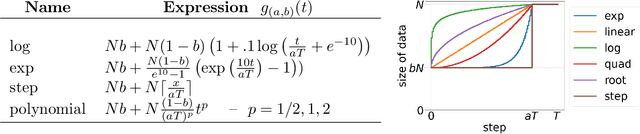
Inspired by human learning, researchers have proposed ordering examples during training based on their difficulty. Both curriculum learning, exposing a network to easier examples early in training, and anti-curriculum learning, showing the most difficult examples first, have been suggested as improvements to the standard i.i.d. training. In this work, we set out to investigate the relative benefits of ordered learning. We first investigate the \emph{implicit curricula} resulting from architectural and optimization bias and find that samples are learned in a highly consistent order. Next, to quantify the benefit of \emph{explicit curricula}, we conduct extensive experiments over thousands of orderings spanning three kinds of learning: curriculum, anti-curriculum, and random-curriculum -- in which the size of the training dataset is dynamically increased over time, but the examples are randomly ordered. We find that for standard benchmark datasets, curricula have only marginal benefits, and that randomly ordered samples perform as well or better than curricula and anti-curricula, suggesting that any benefit is entirely due to the dynamic training set size. Inspired by common use cases of curriculum learning in practice, we investigate the role of limited training time budget and noisy data in the success of curriculum learning. Our experiments demonstrate that curriculum, but not anti-curriculum can indeed improve the performance either with limited training time budget or in existence of noisy data.
Understanding the Failure Modes of Out-of-Distribution Generalization
Oct 29, 2020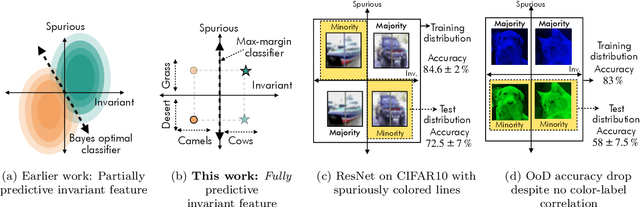
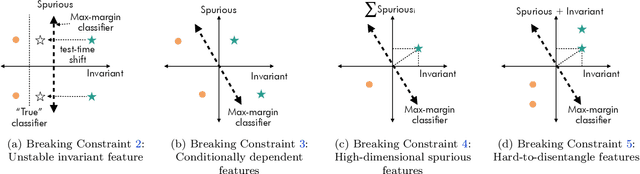
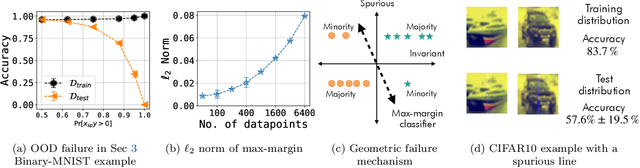
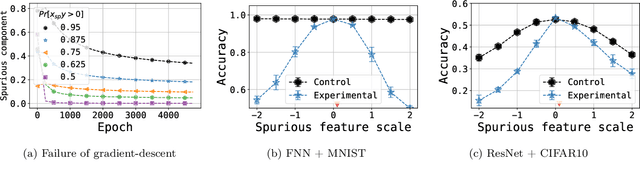
Empirical studies suggest that machine learning models often rely on features, such as the background, that may be spuriously correlated with the label only during training time, resulting in poor accuracy during test-time. In this work, we identify the fundamental factors that give rise to this behavior, by explaining why models fail this way {\em even} in easy-to-learn tasks where one would expect these models to succeed. In particular, through a theoretical study of gradient-descent-trained linear classifiers on some easy-to-learn tasks, we uncover two complementary failure modes. These modes arise from how spurious correlations induce two kinds of skews in the data: one geometric in nature, and another, statistical in nature. Finally, we construct natural modifications of image classification datasets to understand when these failure modes can arise in practice. We also design experiments to isolate the two failure modes when training modern neural networks on these datasets.
Are wider nets better given the same number of parameters?
Oct 27, 2020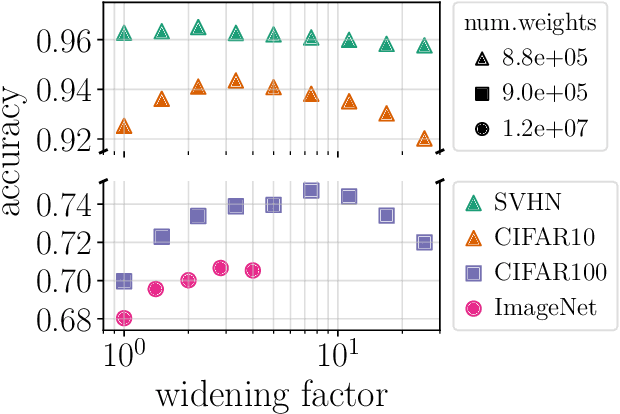

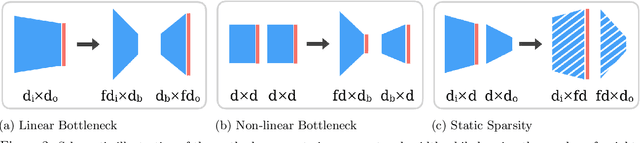
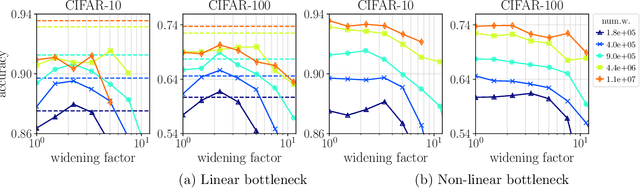
Empirical studies demonstrate that the performance of neural networks improves with increasing number of parameters. In most of these studies, the number of parameters is increased by increasing the network width. This begs the question: Is the observed improvement due to the larger number of parameters, or is it due to the larger width itself? We compare different ways of increasing model width while keeping the number of parameters constant. We show that for models initialized with a random, static sparsity pattern in the weight tensors, network width is the determining factor for good performance, while the number of weights is secondary, as long as trainability is ensured. As a step towards understanding this effect, we analyze these models in the framework of Gaussian Process kernels. We find that the distance between the sparse finite-width model kernel and the infinite-width kernel at initialization is indicative of model performance.
The Deep Bootstrap: Good Online Learners are Good Offline Generalizers
Oct 16, 2020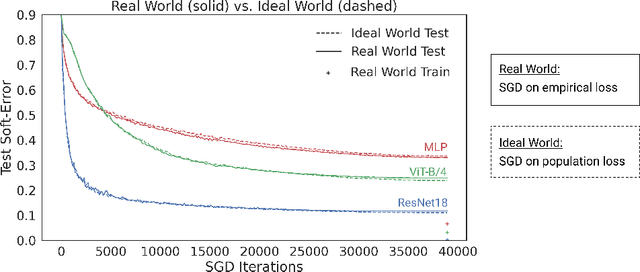
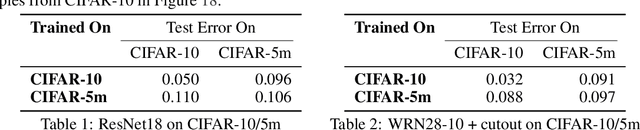
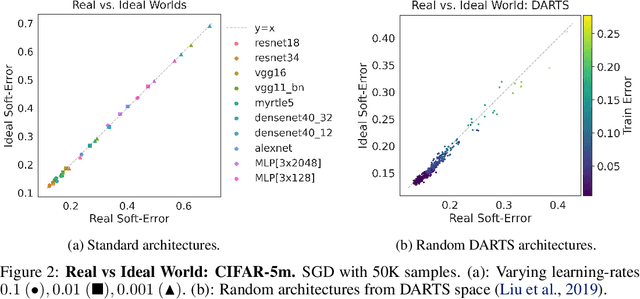
We propose a new framework for reasoning about generalization in deep learning. The core idea is to couple the Real World, where optimizers take stochastic gradient steps on the empirical loss, to an Ideal World, where optimizers take steps on the population loss. This leads to an alternate decomposition of test error into: (1) the Ideal World test error plus (2) the gap between the two worlds. If the gap (2) is universally small, this reduces the problem of generalization in offline learning to the problem of optimization in online learning. We then give empirical evidence that this gap between worlds can be small in realistic deep learning settings, in particular supervised image classification. For example, CNNs generalize better than MLPs on image distributions in the Real World, but this is "because" they optimize faster on the population loss in the Ideal World. This suggests our framework is a useful tool for understanding generalization in deep learning, and lays a foundation for future research in the area.
Sharpness-Aware Minimization for Efficiently Improving Generalization
Oct 03, 2020
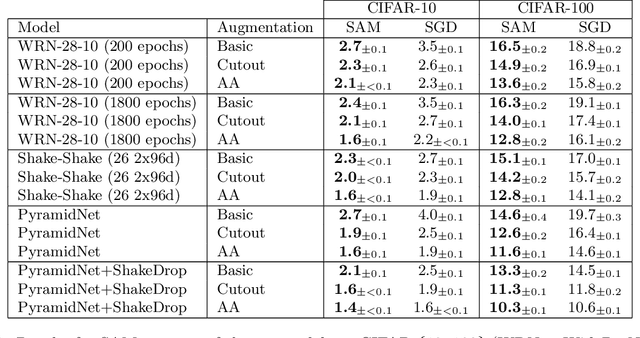
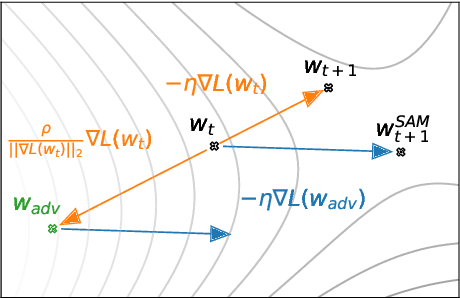
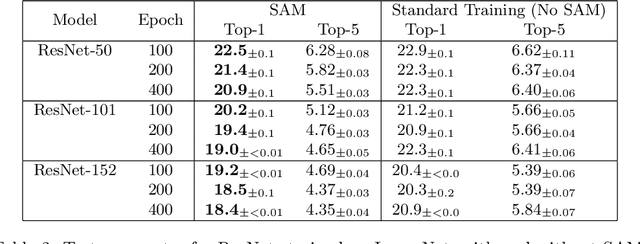
In today's heavily overparameterized models, the value of the training loss provides few guarantees on model generalization ability. Indeed, optimizing only the training loss value, as is commonly done, can easily lead to suboptimal model quality. Motivated by the connection between geometry of the loss landscape and generalization---including a generalization bound that we prove here---we introduce a novel, effective procedure for instead simultaneously minimizing loss value and loss sharpness. In particular, our procedure, Sharpness-Aware Minimization (SAM), seeks parameters that lie in neighborhoods having uniformly low loss; this formulation results in a min-max optimization problem on which gradient descent can be performed efficiently. We present empirical results showing that SAM improves model generalization across a variety of benchmark datasets (e.g., CIFAR-{10, 100}, ImageNet, finetuning tasks) and models, yielding novel state-of-the-art performance for several. Additionally, we find that SAM natively provides robustness to label noise on par with that provided by state-of-the-art procedures that specifically target learning with noisy labels.
Extreme Memorization via Scale of Initialization
Aug 31, 2020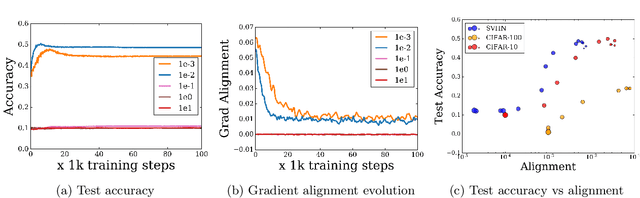
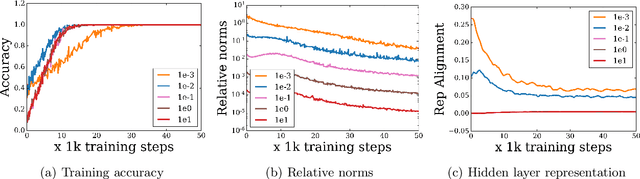
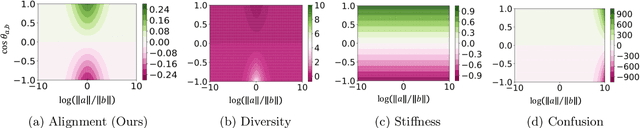
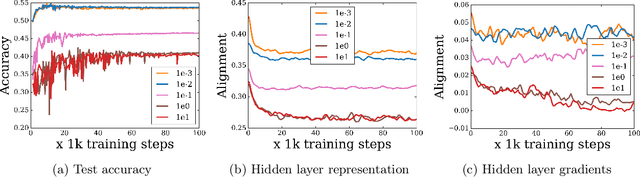
We construct an experimental setup in which changing the scale of initialization strongly impacts the implicit regularization induced by SGD, interpolating from good generalization performance to completely memorizing the training set while making little progress on the test set. Moreover, we find that the extent and manner in which generalization ability is affected depends on the activation and loss function used, with $\sin$ activation being the most extreme. In the case of the homogeneous ReLU activation, we show that this behavior can be attributed to the loss function. Our empirical investigation reveals that increasing the scale of initialization could cause the representations and gradients to be increasingly misaligned across examples in the same class. We further demonstrate that a similar misalignment phenomenon occurs in other scenarios affecting generalization performance, such as changes to the architecture or data distribution.
What is being transferred in transfer learning?
Aug 26, 2020
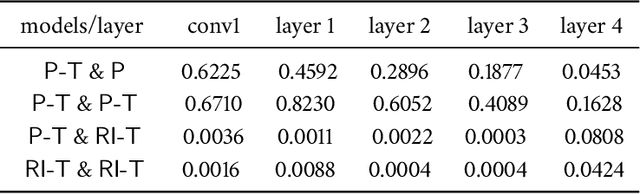

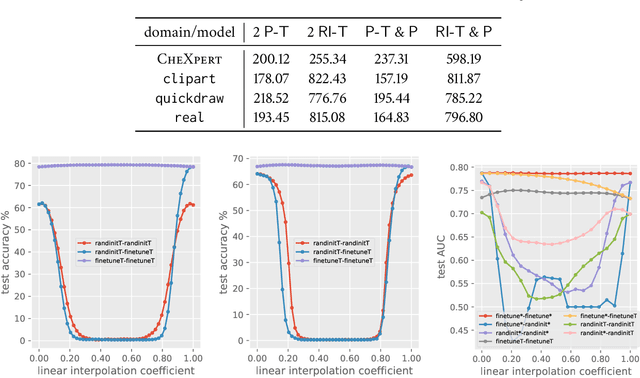
One desired capability for machines is the ability to transfer their knowledge of one domain to another where data is (usually) scarce. Despite ample adaptation of transfer learning in various deep learning applications, we yet do not understand what enables a successful transfer and which part of the network is responsible for that. In this paper, we provide new tools and analyses to address these fundamental questions. Through a series of analyses on transferring to block-shuffled images, we separate the effect of feature reuse from learning low-level statistics of data and show that some benefit of transfer learning comes from the latter. We present that when training from pre-trained weights, the model stays in the same basin in the loss landscape and different instances of such model are similar in feature space and close in parameter space.